大型露天矿高精度快速测绘设备对比试验和相应方案研究
2022-10-14余乐文李翰臣杨玉竹
庞 帆,陈 凯,张 达,余乐文,李翰臣,杨玉竹
(1.矿冶科技集团有限公司,北京 100160;2.中国—南非矿产资源可持续开发利用“一带一路”联合实验室,北京 102628)
现阶段,大型露天矿对于矿区现状图快速更新、二维或三维模型重建、采剥量计算、坡顶坡地线提取及边坡稳定性分析等应用具有迫切需求。常规的测绘手段,例如全站仪和GPS RTK等,只能进行单点测量,单点测量方式存在测量效率低下、测量数据不完整及后处理时间长等问题,同时单点测量数据无法表达露天边坡全局和局部细节特征[1],露天边坡稳定性分析和可视化展示效果较差。
近来年,随着三维激光扫描技术、摄影测量技术、同步定位与建图技术[2](Simultaneous Localization and Mapping,SLAM)及无人机技术发展,许多非接触式高精度快速测绘设备进入矿山领域,以“面”测量形式弥补了单点测量形式的不足。现阶段适用于露天矿领域的高精度快速测绘设备,大体分为三类,分别是固定式三维激光扫描仪、以GPS技术为核心的移动式测绘设备、以SLAM技术为核心的移动式测绘设备。
一些学者利用高精度快速测绘设备对露天矿进行数据采集、数据处理及数据应用,例如段奇三[3]利用徕卡HDS-8800固定式三维激光扫描仪对露天矿进行扫描测量,并进行三维建模和数字高程模型生成;李翠等[4]利用无人机航测系统对露天矿边坡进行测量,基于三维激光点云数据实现岩石结构面参数识别和提取;刘亚兵等[5]利用车载式三维激光扫描系统对露天矿进行扫描测量,基于三维激光点云数据进行三维建模。但是,众多学者往往利用单一的高精度快速测绘设备在露天矿山进行数据采集、数据处理和数据应用,没有对多种高精度快速测绘设备进行对比分析,例如比较不同测绘设备的测量精度、不同测绘设备的适用环境、不同测绘设备的优缺点等。
基于以上情况,本文首先根据测量原理对适合露天矿快速测绘的设备进行分类,在不同类别中选取具有代表性的设备,然后结合某大型露天矿山,系统性介绍各个设备的数据采集流程、主要输出成果、测量精度及优劣势,最后针对大型露天矿山不同测绘需求提出不同的测绘解决方案。
1 露天矿简介
某大型露天矿位于黑龙江省鹤岗市萝北县,矿区南北方向跨度超2 km,东西方向跨度超1 km,最大高差超200 m,被誉为“亚洲第一大石墨矿”,矿区三维模型如图1所示。矿区形状呈现不规则、狭长型分布。单点测量方式外业采集难度较大,采集效率较低,且操作人员安全性无法得到保障。

图1 大型露天矿三维模型Fig.1 3D model of large open-pit mine
2 数据采集
2.1 高精度快速测绘设备选型
根据测绘原理,现阶段露天矿领域的高精度快速测绘设备主要分为三类:固定式三维激光扫描仪、以GPS技术为核心的移动式测绘系统、以SLAM技术为核心的移动式测绘系统。当前以GPS技术、SLAM技术为核心的移动式测绘系统按照搭载核心传感器不同可分为基于视觉相机和基于激光雷达两类,但是基于视觉SLAM技术的移动式测绘系统尚不成熟,无法进入实际应用阶段。
不同厂商的固定式三维激光扫描仪测量精度相当,均能达到毫米级建图精度,例如矿冶集团BLSSHP、美国 FARO Focus Premium[6]、奥地利 Riegl VZ-400i[7]等,本文选取BLSS-HP作为远距离高精度三维激光扫描仪的代表。基于视觉相机的以GPS技术为核心的移动式测绘设备,典型代表是无人机航测测图系统,例如大疆精灵4 RTK[8]、大疆DJI-P1[9]等设备,本文选择像素更高、更加新颖的DJI-P1作为该类型的代表。基于激光雷达的以GPS技术为核心的移动式测绘设备,其系统建图精度依赖于激光雷达的测距精度,例如数字绿土公司无人机式激光雷达扫描系统LiAir 250 Pro[10]采用Riegl miniVUX-3 UAV机械旋转式激光雷达,毫米级测距精度,但是价格昂贵,性价比较低;车载式移动测绘系统LiMobile[11],由于露天矿道路凹凸不平,车辆抖动问题严重,影响建图精度,同时道路会因采矿爆破任务受阻,无法进行测量任务。因此,本文选取价格较低、性价较高、更加新颖的DJI-L1[12]无人机式三维激光扫描测量系统作为代表,其采用新型固态激光雷达,具有厘米级的建图精度。以SLAM技术为核心的移动式测绘设备,例如矿冶集团手持式三维激光测量系统BLSS-HL、无人机式三维激光测量系统BLSS-FL、飞马公司手持式三维激光测量系统SLAM100[13]、英国手持式三维激光测量系统GEOSLAM[14]、澳大利亚手持式三维激光测量系统Hovermap[15],以上设备均为厘米级建图精度且数据采集流程较为一致,因此,本文选取矿冶集团手持式和无人机式的三维激光扫描测量系统作为代表。
综上所述,本文选取五款具有代表性的高精度快速测绘设备进行对比试验。
2.2 BLSS-HP固定式三维激光扫描系统采集
固定式三维激光扫描系统BLSS-HP主要由固定式扫描主机、三脚架及手机端采集软件构成,如图2(a)所示,BLSS-HP扫描流程较为简单,将手机端通过无线方式连接至固定式扫描主机,在手机软件端进行扫描参数设置,例如水平方向扫描分辨率和竖直方向扫描分辨率等,软件端根据扫描参数能够预估单站扫描时间。固定式三维激光扫描系统通常扫描半径约为1~2 km。单站扫描全局三维激光点云地图如图2(b)所示,局部三维激光点云地图如图2(c)所示,可以清晰看出标志牌上“无人驾驶”字样,表明BLSS-HP生成的三维激光点云精度较高,但是会存在部分点云数据缺失,特别是露天矿的“台阶”,如图2(d)所示。

图2 BLSS-HP系统采集Fig.2 BLSS-HP system acquisition
2.3 BLSS-HL手持式三维激光扫描系统采集
手持式三维激光扫描系统BLSS-HL主要由移动扫描主机和平板端采集软件构成,如图3(a)所示,移动扫描主机内部集成了先进的多线激光雷达和高精度惯性测量单元,基于多传感器融合SLAM技术,能够在无GNSS定位信号和无光照条件下实现连续动态测量。
BLSS-HL扫描流程较为简单,首先将手柄和电池通过快速释放装置安装到移动扫描主机上,短按扫描主机按钮,然后打开平板电脑搜索扫描主机无线信号,打开控制及可视化软件,设置电机转速等扫描参数,单击启动扫描,此时电机开始旋转,同时平板端软件实时显示被测矿体的三维激光点云数据,接下来手持BLSS-HL系统边行走边测量,行走速度约为1~2 m/s,待感兴趣区域扫描完毕后,点击停止扫描。最后将USB存储单元插入移动扫描主机中自动拷贝激光点云数据。BLSS-HL单次获取露天矿三维激光点云地图如图3(b)所示,局部激光点云地图如图3(c)所示。

图3 BLSS-HL系统采集Fig.3 BLSS-HL system acquisition
2.4 BLSS-FL无人机式三维激光扫描系统采集
无人机式三维激光扫描系统BLSS-FL,如图4(a)所示,BLSS-FL主要由大疆无人机M300RTK、移动扫描主机及平板端采集软件构成,其中移动扫描主机与BLSS-HL中移动扫描主机一致,BLSS-FL中移动扫描主机由无人机电池进行供电,移动扫描主机与大疆无人机M300RTK通过快速释放装置进行连接。BLSSFL扫描流程与BLSS-HL较为一致,边飞行边测量,无人机飞行速度约为4~5 m/s。BLSS-FL单次获取露天矿三维激光点云地图如图4(b)所示,局部激光点云地图如图4(c)所示,被测矿体细节表达较为清晰。

图4 BLSS-FL系统采集Fig.4 BLSS-FL system acquisition
2.5 DJI-L1无人机式三维激光扫描系统采集
无人机式三维激光扫描仪DJI-L1,如图5(a)所示,DJI-L1主要由大疆无人机 M300RTK、禅思L1及大疆智图后处理软件DJI-terra[16]构成,禅思L1集成固态激光雷达Livox、高精度惯导、测绘相机。由于该露天矿测区范围内最大高差近200 m,而禅思L1最佳测距范围为100 m左右,为保证DJI-L1对所有矿体进行有效测量,首先利用DJI-P1建立露天矿整体的数字表面模型DSM,然后利用DJI-L1根据露天矿整体数字表面模型DSM进行仿地飞行,仿地飞行高度约为60 m,飞机飞行三个架次,飞行速度约为7 m/s,拍摄照片数量1 381张,DJI-L1航线飞行如图5(b)所示,获取原始数据量大小为32 G。后处理过程采用大疆智图软件进行,最终生成的真彩色三维激光点云数据如图5(c)所示,局部真彩色三维激光点云数据如图5(d)所示。

图5 DJI-L1系统采集Fig.5 DJI-L1 system acquisition
2.6 DJI-P1无人机式航测系统采集
无人机式航测系统DJI-P1,如图6(a)所示,DJI-P1主要由大疆无人机M300RTK、大疆全画幅相机P1及大疆智图后处理软件构成。利用DJI-P1对露天矿进行正射影像拍摄,测区面积为1 480 173 m2,飞行高度为180 m,航线长度为30 208 m,飞机飞行两个架次,拍摄照片数量1 508张,DJI-P1航线飞行如图6(b)所示,获取原始数据量大小为26.8 G。后处理过程采用大疆智图软件进行,软件运行环境为i9-11900 H处理器、32G内存、GTX3060显卡,后处理时间约7 h,最终生成的全局真彩色三维模型如图6(c)所示,该三维模型包含较好的立面信息,细节真彩色三维模型如图6(d)所示。

图6 DJI-P1系统采集Fig.6 DJI-P1 system acquisition
3 设备对比及方案推荐
3.1 测量精度分析
首先在露天矿区范围内布置4个标志牌,一个标志牌选取两个标靶点,共计8个标靶点,利用钢尺分别对4个标志牌上两标靶点间的欧式距离进行测量,将该距离视为真实值,然后分别利用固定式三维激光扫描系统BLSS-HP、手持式三维激光扫描系统BLSS-HL、无人机式三维激光扫描系统BLSS-FL和DJI-L1对矿区进行扫描,在各自生成的三维激光点云地图中提取8个标靶点坐标,计算4个标志牌上两标靶点间的欧式距离,同时本文利用GPS RTK采集8个标靶点坐标并计算4个标志牌上两标靶点间的欧式距离,将这些距离视为估计值,将估计值与真实值作差视为各系统的相对测量精度。固定式三维激光扫描系统BLSS-HP测量标靶点坐标如表1所示,手持式三维激光扫描系统BLSS-HL测量标靶点坐标如表2所示,无人机式三维激光扫描系统BLSS-FL测量标靶点坐标如表3所示,无人机式三维激光扫描系统DJI-L1测量标靶点坐标如表4所示,GPS RTK获取标靶点坐标如表5所示,由于各测量系统输出数据的起始坐标系不一致,因此各测量系统提取的标靶点坐标不尽相同,各系统相对测量精度如表6所示。DJI-P1设备经过大疆智图软件处理后可以生成模型数据和激光点云数据,由于生成的激光点云较为稀疏,标靶点坐标无法准确提取,因此无法实测DJI-P1设备构建激光点云地图的精度,其构建的模型精度可参考官网,平面方向精度为3 cm,高程方向精度为5 cm[9]。
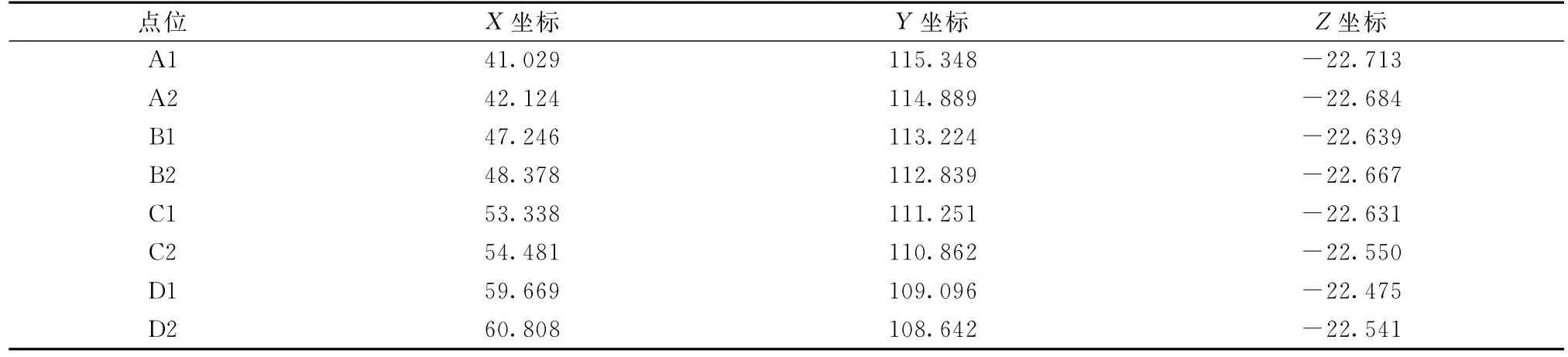
表1 BLSS-HP测量标靶点坐标Table 1 BLSS-HP measurement target coordinates /m

表2 BLSS-HL测量标靶点坐标Table 2 BLSS-HL measurement target coordinates /m

表3 BLSS-FL测量标靶点坐标Table 3 BLSS-FL measurement target coordinates /m

表4 DJI-L1测量标靶点坐标Table 4 DJI-L1 measurement target coordinates /m
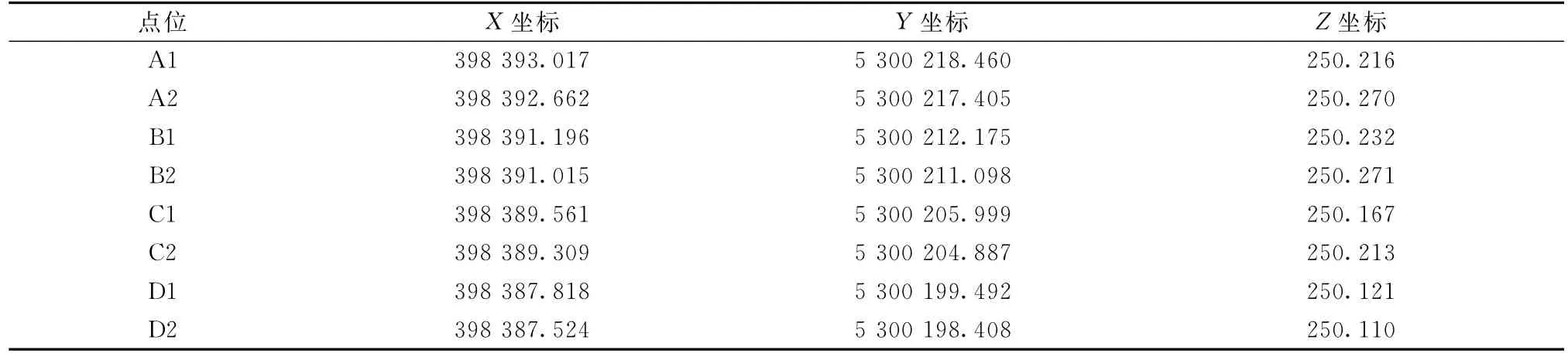
表5 GPS RTK测量标靶点坐标Table 5 GPS RTK measurement target coordinates /m

表6 各系统相对测量精度Table 6 Relative measurement accuracy of each system /m
根据表6测量精度结果,各测量系统的相对测量精度由高到低依次为固定式三维激光扫描系统BLSS-HP、手持式三维激光扫描系统BLSS-H L、无人机式三维激光扫描系统BLSSFL、GPS RTK、无人机式三维激光扫描系统DJI-L1。
3.2 优劣势分析
各测量系统优劣势分析如表7所示。
3.3 解决方案
结合表6各设备的测量精度和表7优劣势分析,不同测绘需求相应测绘解决方案总结如表8所示。
另外,可融合多种设备进行高精度快速测绘,例如利用DJI-L1设备首次获取大型露天矿三维激光点云数据,后续随着爆破开采任务推进,利用BLSSHL或BLSS-FL设备进行局部矿体数据更新。
4 结论
大型露天矿山对于高精度快速测绘具有多样化需求,需要不同的测绘手段,为解决该问题,本文首先根据测量原理对适合露天矿快速测绘的设备进行分类,在不同类别中选取具有代表性的设备,然后结合某大型露天矿山,系统性介绍各个设备的数据采集流程、主要输出成果、测量精度及优劣势,最后针对大型露天矿山不同测绘需求提出不同的测绘解决方案。
