磁导向钻井技术在井眼重入中的应用
2022-10-13胡一鸣于晓东翁广超
胡一鸣 于晓东 翁广超
1.中国石油冀东油田储气库建设项目部 2.中国石油渤海钻探工程公司第一钻井公司 3.中国石油渤海钻探工程公司定向井技术服务公司
0 引言
磁导向钻井技术是利用探管内的磁传感器来测量信号源和本体位置之间的距离和方位,以达到轨迹的精准控制。该技术在救援井控制井喷中被成功地运用,可以顺利引导救援井与事故井建立有效的连通;在煤层气水平连通井和稠油热采双水平井、U形水平井施工中也得到了广泛应用[1-5]。
近年来,国内利用枯竭油气藏改建地下储气库工程建设发展迅猛,但在库址筛选中,往往存在某些生产老井,由于钻井施工中发生卡钻、钻具落井等历史原因进行了侧钻,而弃置的裸眼大多钻穿了储气库盖层,给储气库建设带来较大的安全隐患。因井下钻具与周边邻井套管对测量工具存在严重的磁干扰影响,常规方法不能有效封堵裸眼。故需采用磁导向钻井技术,以救援井重入裸眼并固井封堵的方式来满足储气库安全运行要求。
笔者以NP198井施工为例,在使用国内自主研制的首套主动磁测距系统(简称CPET)反演出两井眼位置关系的基础上,优化轨道设计,实现裸眼重入。形成了磁导向钻井技术重入井眼的设计方案,为储气库复杂弃置井眼封堵奠定了基础。
1 井况与技术难点
1.1 基本情况
NP198井是冀东南堡储气库区的1口生产老井,2018年老井筒(以下简称Y1)在钻进中发生失返性漏失,因钻具掩埋造成弃置回填,侧钻新井筒(以下简称Y2)投产。Y1井筒内存在落鱼为Ø127 mm钻杆及底部钻具组合,鱼顶深度641.7 m,鱼长1 162.61 m。且该裸眼钻穿储气库的玄武岩盖层(2 021.8 ~2 482.7 m)和直接泥岩盖层(2 482.7 ~2 510.3 m),钻穿储气层(2 510.3~2 594.7 m)并与周围邻井连通,井身结构如图1所示。地下储气库存在盖层密封不严导致天然气上窜的较高风险,需找到弃置的裸眼井段,并对其进行有效封堵;但因常规随钻测量工具(简称MWD)受井下套管和落鱼等铁磁物质的磁干扰影响,无法提供准确的定向数据;故采用救援井重入裸眼并套管固井封堵的方案。

图1 NP198井井身结构图
1.2 井眼重入方案
对于有落鱼的侧钻未封裸眼,落鱼难以打捞,救援井轨迹利用磁导向技术跟踪下部落鱼位置。钻碰Y1井眼内落鱼中部1 700 m处,当磁导向工具接近落鱼钻具时,根据其磁饱和程度,计算出新、老井眼的空间位置关系及点、井段之间的距离;救援井逐步平行逼近Y1井眼,在落鱼底部及时调整,实现井眼重入;冲探到井底后套管固井,满足储气库废弃井封井要求。
1.2.1 Y2生产井筒封井
利用陀螺仪复测现井筒井斜数据;对射孔井段以上进行井筒试压,下入水泥承留器,对射孔层挤注超细水泥;对承留器以上井筒分段注水泥塞至油层套管水泥返高。
1.2.2 磁导向试碰落鱼
CPET主动磁测距系统通过在新钻救援井中下入放电电极和探测探管,电极向救援井周围地层注入电磁波,电极注入地层的电磁波呈球形对称分布,如果电极附近地层中存在套管或钻杆(金属物),由于金属材质的电导率要远大于地层,因此电磁波大部分将在套管或钻杆处聚集,形成沿管柱向上和向下流动的电流,从而产生磁场。通过探测磁信号和自身姿态(井眼轨迹)来探测井间距离及方位(相对位置关系)[6]。该系统磁测量范围大于30 m;距离测量误差小于10%;方位测量误差小于3°;耐温125℃,耐压50 MPa。
利用该系统跟踪下部落鱼位置,根据钻具蹩跳、扭矩增大等现象,判断是否碰撞Y1井眼内的落鱼(设计1 700 m处)。试探落鱼的目的在于验证磁测距的结果,根据磁饱和程度,计算出新、老井眼空间位置关系,对磁场参数进行修正;以救援井实钻井眼为基准,反演磁源(井下落鱼)的真实方位和距离,对目标井下部轨迹进行校正,提高重入的成功率[7]。
1.2.3 落鱼底部重入
试探落鱼后,井眼内打水泥塞回填至1 560 m(根据井眼轨迹平滑程度确定填眼侧钻位置,进而确定打水泥塞的厚度),侧钻平行逼近Y1井眼,通过磁测距参数,不断校核目标井的井眼轨迹,在落鱼底部重入Y1井眼(图2)。

图2 施工方案示意图
1.3 轨迹控制难点
1.3.1 MWD测量工具受磁干扰影响严重
新老井眼轨迹空间交叉密集,救援井定向存在磁干扰影响。存在4口距离较近邻井,最近距离在6~10 m,防碰风险增加,在上部井段尤为突出;且随钻MWD工具受井下套管和落鱼等铁质金属的磁干扰影响,定向施工无法测量出准确的方位数据来完成救援井轨迹方位的控制,井眼位置关系控制困难,累计误差较大。需频繁起下钻,通过陀螺测斜和磁测距的方法来校正井眼空间位置关系。
1.3.2 碰探落鱼和井眼交汇成功率低
救援井轨迹控制精度要求较高。常规井是靶区半径范围的控制,而救援井重入裸眼对测量和控制的精度相当于点控制,误差要求厘米级[8-11]。由于钻进参数的选取、井斜方位的控制、主动磁测距系统误差等因素的存在,极易出现救援井与落鱼或Y1井眼侧面交叉,井眼交汇难度较大。
1.3.3 救援井并行钻进控制困难
Y1裸眼由于长时间弃置,井眼复杂,井壁坍塌风险较高。钻头与地层接触方式不同导致其井眼轨迹存在差异,定向工具面的连续稳定性很难控制,造斜率能否达到设计要求不易保证。只能加密磁测距的次数,配合陀螺测量出准确方位,两井眼保持上下平行关系,井距控制在1~2 m之间十分困难。
2 轨迹控制方案
2.1 井身剖面设计
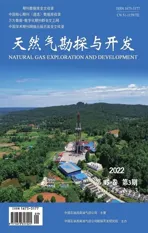
在设计阶段,参考原始的井身数据,设计五段制井身剖面。能否成功与落鱼碰撞是重入Y1井眼的前提条件,作用在于可证实CPET磁测距系统的准确性与可靠性,对磁测距系统误差进行校正[12]。设计在井深1 500~1 700 m以逐步渐进的方式逼近、试探落鱼管柱,造斜率设计3°/30 m,确保井眼轨迹的平滑,降低定向的难度(表1)。成功探到落鱼后,救援井以平行轨迹逐步逼近Y1井眼,稳斜钻进,交汇成功率极大提高[13-14]。
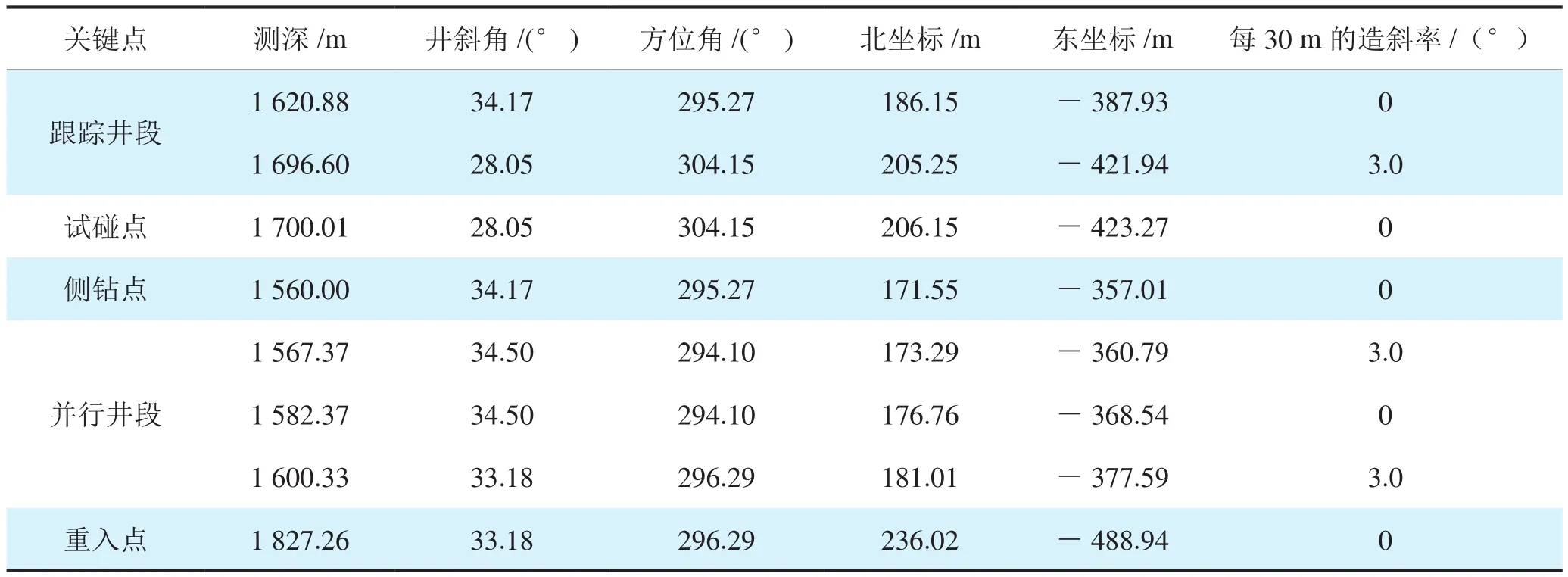
表1 概念设计井身剖面展示表
2.2 井眼轨迹精细控制
如果定向对井眼轨迹控制不精细,则无法按照设计的井身剖面接近目标井,在后期并行钻进中轨迹调整将非常困难。救援井磁导向钻井作业分为MWD轨迹测控接近老井、磁导向测距定位逼近、轨迹伴行实时跟踪、连通并重入裸眼4个阶段。具体施工方案如表2所示。
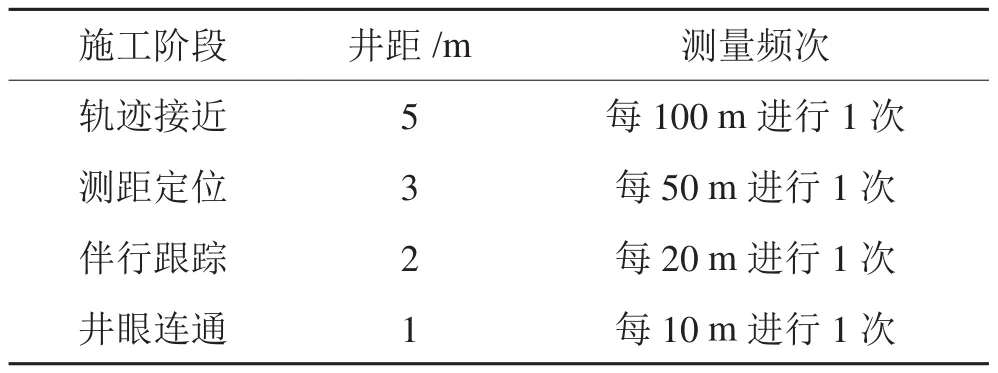
表2 磁测距施工频次统计表
轨迹精细控制措施:①当随钻MWD测量方位数据受到严重磁干扰时,使用CPET系统测量井眼直接空间位置关系和中心距离,配合陀螺仪器测量真方位来代替随钻MWD仪器的失真方位[10];②采用逐步加密测距方法,在重要井段、测试盲段增加数据采集点,实时监测井眼轨迹走向及与老井眼直接的位置关系;③控制井眼轨迹平滑程度,滑动钻进测斜间距不超过5 m,每趟起下钻和完钻进行电子单、多点测斜。井斜角控制在±0.5°范围内,方位控制在±2°范围内[15]。
2.3 钻具组合优选
根据牙轮钻头的研磨特性,定向工具面的稳定性较易控制,轨迹较易调整。在牙轮钻头碰探到落鱼时,可依据钻具蹩跳、扭矩增大等现象,及时发现是否碰探到落鱼钻具。在目标井眼的重入后的冲探作业中,由于井壁存在坍塌缩径的风险,采用小尺寸的牙轮钻头冲探形成初步稳定的浅井眼,防止钻出新井眼,后使用常规尺寸的PDC钻头快速扩眼的方式冲探到井底[16-18]。
冲探Y1裸眼钻具组合如下所述。
1)冲探树眼:Ø193.7 mm牙轮钻头+Ø165 mm转换接头+Ø165 mm止回阀+Ø172 mm无磁钻铤+MWD短节+Ø172 mm无磁钻铤+G105加重钻杆+G105钻杆。
2)扩眼:Ø215.9 mmPDC钻头+Ø172 mm螺杆钻具+Ø165 mm止回阀+Ø210 mm稳定器+Ø172 mm无磁钻铤+MWD短节+Ø172 mm无磁钻铤+G105加重钻杆+G105钻杆。
2.4 关键层位岩性识别
根据邻井及区域地层特征分析预测,救援井由上至下可钻遇如下地层。
平原组(Qp):厚约300 m,岩性为黏土和散砂。
明化镇组(Nm):厚度在1 365 m左右,上段为灰色粉砂岩、细砂岩、灰白色中砂岩与棕黄色泥岩、粉砂质泥岩呈不等厚互层,以砂岩为主;下段多为浅灰色细砂岩与灰色、棕红色、灰绿色泥岩不等厚互层,以泥岩为主。
馆陶组(Ng):厚714 m左右(未钻穿),上部为浅灰色含砾砂岩、砂砾岩及浅灰色细砂岩、棕红色泥质细砂岩与灰黄色、灰色泥岩呈不等厚互层;中部为厚层灰黑色玄武岩;底部以厚层浅灰色细砂岩、砂砾岩为主。
在重入、冲探Y1井眼阶段,均有明显的标志层。根据岩性的识别和钻时的变化情况,增加井身走向的把握。其中,明化镇组下段下部(井深1 749~1 789 m)发育1套稳定泥岩段,是划分明化镇组和馆陶组的标志,也是即将钻至落鱼底部的标志。落鱼底深1 813 m,在钻穿标志层后,进尺24 m可达到落鱼位置;冲探老井眼的标志层为南堡1号构造NgⅢ和NgIV①巨厚的火成岩,为NgⅣ和Ed1段油藏的区域性盖层,当钻遇岩性出现由灰黑层玄武岩至浅灰色细砂岩变化时,即冲探至井眼底部。
3 现场应用情况
3.1 磁测距定位逼近
二开钻进至813 m(测深793 m)测斜数据方位就已经存在磁干扰现象,在1 151 m以下的井段随钻MWD仪器受到持续严重磁干扰,方位基本无法判断其准确性,轨迹方位得不到有效控制(表3)。
表3 定向井井斜方位及磁感应数据表
磁场强度标准值为53.7 µT(微特斯拉);地磁倾角标准值为57.9 µT。由于随钻仪器探管精度及无磁材质的影响,实测值与标准值变动±1%为相对正常,超过本技术定义为异常。
在逼近目标井阶段,利用磁导向测距和随钻陀螺结果,及时调整救援井的井斜方位和两井眼的相对位置(表4),在保持救援井逼近的趋势,同时预留轨迹调整的空间。
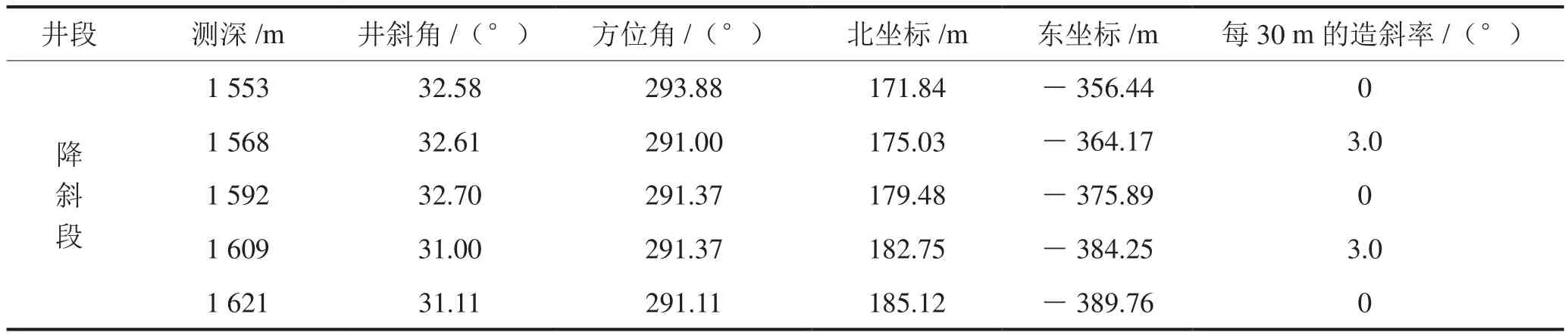
表4 磁定位逼近轨迹一览表
第1次磁测距测深从460 m至1 148 m,由于Y1与Y2井眼未能够彻底分离,测距误差较大;第2次磁导向测深段350~1 296 m,验证Y1、Y2井眼在 1 100 m 以下才彻底分离,得到有效的测量数据。为了避免MWD工具受到磁干扰,井间位置保持在5~6 m距离伴行钻进至1 402 m,扭方位降斜逐步逼近Y1井眼,在相对井距小于5 m后,加密磁测距与陀螺测斜的频次,依次在1 550 m、1 590 m、1 614 m、1 639 m处计算出对应相对井距为4.22 m、3.87 m、3.47 m、1.2 m。
3.2 试探落鱼
井眼轨迹设计在1 648 m增斜后稳斜,在1 660~1 720 m段碰撞落鱼,采用二维(两井眼上、下关系)逼近,方位同老井眼保持一致,只对井斜进行调整,降低轨迹控制难度[16]。井斜严格控制在31°~32°;方位控制在 296°~298°。轨迹剖面如表5所示。

表5 试探落鱼轨迹数据表
磁测距作业的间隔为30 m,并后期逐步加密测距,提升相对距离和方位的控制。在1 652 m、1 685 m、1 715 m处对应磁测距数据为:相对井距0.71 m、0.43 m、1.12 m。
根据第10次磁测距结果,救援井在1 715m处与Y1井眼相对距离较1 685 m处远离了0.69 m;采集的数据点显示,救援井在1 681 m与Y1 井眼距离为0.38 m,与落鱼最为接近。结合钻井参数的变化,钻具无蹩跳,扭矩正常,复合钻进钻时由3~6 min/m上升至12 min/m,在1 681~1 685 m井段持续有铁屑返出。分析由于钻头与落鱼存在点、线接触,不是面接触。从而返出钻头刮削的铁屑,并没有发生强烈的钻具蹩跳现象,扭矩也没有发生大的变化。后来铁屑经化验为 G105钢级钻杆材料,证明与落鱼发生了接触,满足校正轨迹数据的要求,如图3、4所示。

图3 返出铁屑照片

图4 钻头磨损照片
3.3 重入目标井
在第10次磁导向测量中发现轨迹与Y1井眼逼近至空间交错(表6)。

表6 第10次磁测距数据表
在1 681~1 685 m钻头已经与落鱼管柱平行,存在侧面的点接触。调整方案不再进行填眼侧钻,而是快速降低方位,控制当前井眼轨迹在落鱼正上方 0.5~0.7 m 位置与Y1井眼伴行。通过扭方位、降斜逐步重入Y1井眼(图5)。
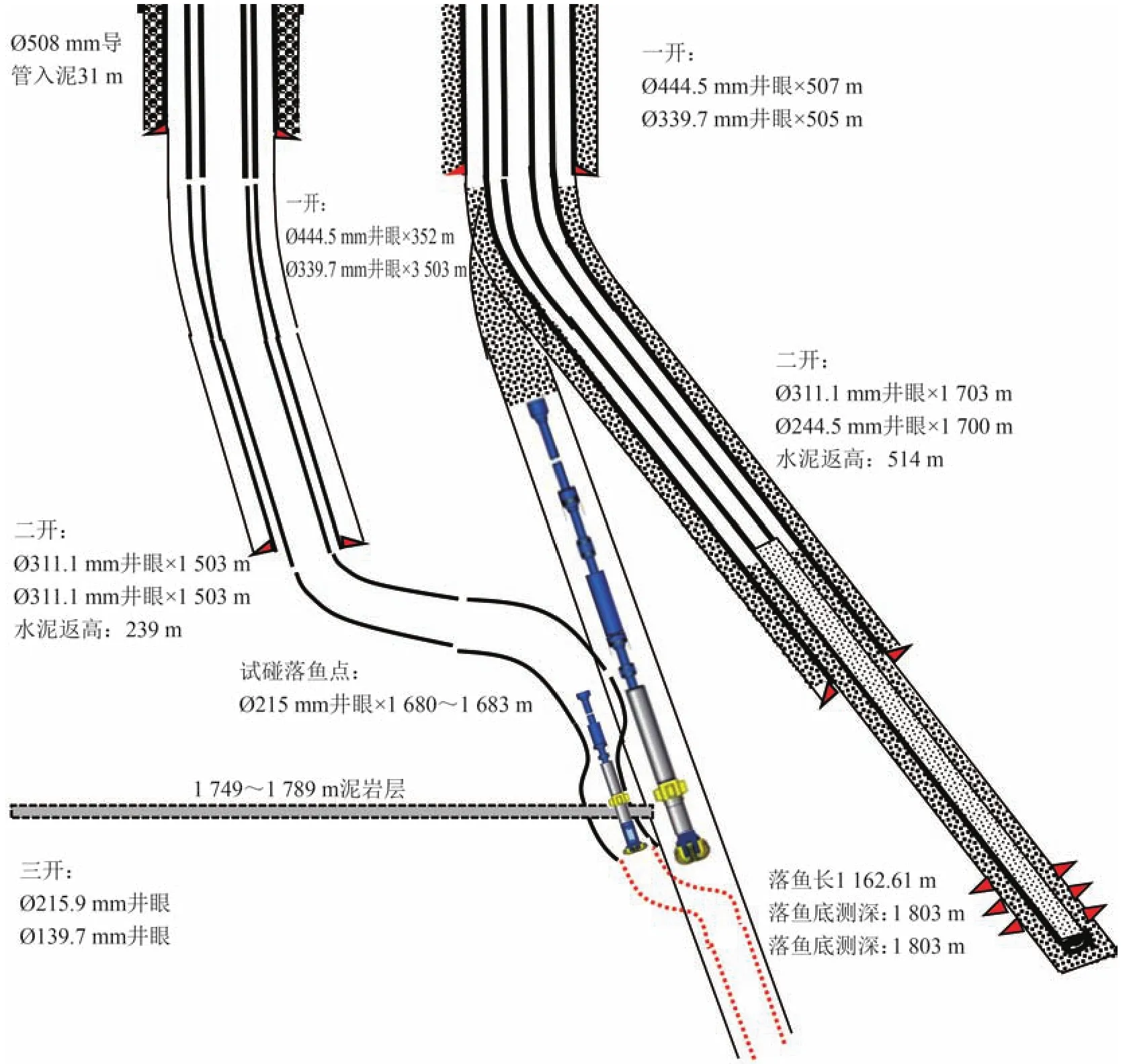
图5 井眼重入施工设计图
此时随钻MWD仪器基本上处于异常失效的状态,每钻进20 m,进行陀螺测量和磁测距来控制调整方位和跟踪井眼轨迹位置[13]。分别在测深1 738 m、1 754 m、1 775 m、1 790 m测相对井距为1.19 m、0.77 m、0.84 m、0.59 m,相对井距逐渐缩短。磁导向钻井的井身姿态如图6所示。

图6 井眼轨迹水平投影图
通过录井的岩性分析,1 739~1 756 m岩性出现浅灰色泥质砂岩和棕红色泥岩,根据地质卡层结果,已经进入标志泥岩层6 m;1 756~1 794 m岩性为钻穿泥岩标志层5 m,岩性出现浅灰色细砂岩、棕红色泥质细砂岩和灰色泥岩,以砂岩为主,说明已经钻至馆陶组,距离落鱼位置剩余9 m。
1 807.8~1 808.8 m出现钻压放空现象,钻井参数表现为:①瞬时漏失钻井液4 m³;②钻井液密度由 1.25g/cm3降至 1.23 g/cm3,黏度由 45 s 升高至50 s,持续 6 min 后恢复;③钻时由 16 min/m 下降至 1 min/m;④钻压由 6~8 t 下降至 2~4 t。判定已重入Y1井眼。
3.4 井眼冲探
由于Y1井眼就是因为井漏发生卡钻造成的弃置,所以水力冲探老井眼主要存在井漏、管柱漏卡、钻出新井眼等难点。采取如下针对性措施。
1)钻井液方面,优选堵漏材料,做好随钻防漏堵漏和专项堵漏工作。提高泥浆防塌抑制、携岩和润滑性能[19]。
2)录井方面,加强岩屑捞砂取样,做好旧岩屑和新地层砂样的对比工作,确保不偏离原井眼[14-15]。
3)钻具组合方面:第1趟使用Ø190.5 mm牙轮钻头+MWD组合钻具由1 808.8 m冲探至1 811.15 m,钻时由6.9 min/m增加到34 min/m;建立正常井眼后,使用Ø215.9 mmPDC钻头+MWD组合钻具冲探,加快冲探速度。
4)缩短冲探井段,降低卡钻风险,冲探至盖层底界50 m(2 560 m)后进行套管固井,满足储气库建库封堵要求。
3.5 技术应用效果
磁导向钻井顺利在1 683 m接触到落鱼,1 808 m重入目标井眼,后根据目标井轨迹校正数据进行定向冲探至2 560 m。在储气库复杂弃置井眼重入施工中得到了成熟的应用,证明了该项技术的可靠性。如表7所示,同试验井坨1井相比,在井况复杂情况下,仅使用CPET系统磁测距14井次实现重入一次成功[20]。

表7 同类井应用效果对比表
4 结论
1)国内自主研制的CPET主动磁测距系统测量精度高,能够反演磁源的真实方位和距离,精确定位新、老井眼轨迹的位置关系。在NP198井复杂弃置井眼的寻探、重入施工得到良好的应用,具有推广价值。
2)磁导向轨迹控制分为MWD测控接近、磁测距定位逼近、伴行实时跟踪、连通并重入裸眼4个阶段;采用二维逼近,方位一致,调整井斜,并搭配陀螺测斜工具,形成了磁导向钻井技术重入裸眼和轨迹精准控制的设计方案。
3)磁导向钻井技术在现场应用方面,以磁测距为基础,并配套地质岩屑识别及元素分析、钻井参数优化与钻具组合优选等多项技术措施,为储气库复杂弃置井眼的重入封堵奠定了基础。