电动振动试验系统检定规程的应用
2022-10-12王振吕新超韩少志
王振 吕新超 韩少志
航空工业北京长城计量测试技术研究所,北京 100095
0 前言
电动振动试验系统是由振动台、振动控制器、功率放大器和控制振动传感器等组成的一个重要的力学环境试验设备[1]。随着技术的进步以及国内电动振动试验系统(以下简称振动台)的发展,振动台的推力明显提高,工作频率范围也在增加,部分振动台可以从1 Hz起振工作。原有的《JJG948—1999数字式电动振动试验系统检定规程》(以下称旧版规程)只适用于推力在100 kN以下的振动台[2],频率范围也只是从5 Hz到2,000 Hz。为满足试验标准对试验设备的要求,国家质量监督检验检疫总局颁布并实施了《JJG948—2018电动振动台试验系统检定规程》(以下称新版规程)。通过几年的检定,本文对比新旧规程,总结了几点体会和注意事项,下面分别进行 介绍。
1 振动控制器的通道一致性测量
在做振动控制器任意两通道一致性测试时,控制器做随机自闭环控制,选择一个通道作为控制通道,控制器输出通道与控制通道连接,其他通道作为测量通道,并通过三通把控制器的输出与控制通道和测量通道相连接,在工作频率范围内设置平直谱观察两通道之间的幅值比。如果控制器具有频率响应分析功能,可以通过控制器软件相位分析功能得到相位差,如无此功能可以不做[3]。
2 正弦振动
现在国内振动台有很多从1 Hz起振。旧版规程对于5 Hz以下和2,000 Hz以上频率的指标没有做出说明,新版规程取消了旧版规程中对频率的限制。在计量较低的频率时,由于加速度传感器的输出电压较小,应注意选取灵敏度较大的三轴加速度传感器或者单向加速度传感器进行测量。在做正弦定频试验选取频率点时,注意台体气囊是否与振动台产生共振,以免影响测量结果。在计量正弦定频10 Hz频率点时,应尽量消除电源干扰,电源产生的50 Hz正是第5次失真谐波,避免在失真度计算时产生较大的加速度值,否则在对失真度的计算时产生较大影响。在计量2,000 Hz以上振动时,选取频响范围较宽的加速度计,并尽可能选用绝缘螺钉刚性地安装在振动台面上,这样可提高传感器的安装谐振频率,又可以有效地防止传感器与台面直接接触,避免脱落和50 Hz电源产生的倍频程干扰。
新版规程在做加速度示值误差时,取消了位移和速度段中频率点的限制。可以在工作频率范围内任选3个频率点做加速度线性,计算出最大的加速度示值误差。
由于控制器采用内部晶振来控制时间,晶振的频率准确性很高,而且新版规程在周期检定中也增加了对控制器频率示值误差的检定,可以保证扫频速率的准确性。在旧版规程中,扫描速率是通过秒表人为操作,在开始扫频时,振动台量级没有办法第一时间到达满量级,计量人员无法第一时间控制秒表,人员操作引入的误差太大,无法精确地衡量振动系统的性能,所以新版规程取消了扫频速率的性能要求。
新版规程中将加速度信噪比改为了加速度噪声,加速度噪声以加速度大小体现出来;在旧版规程中,实验人员不能通过证书中加速度信噪比直观地看到振动台性能,改变后实验人员可以通过加速度大小直接了解振动台的噪声性能。
3 频率响应特性的测量
新版规程中,频率响应特性是周检中增加的必检项目。在计量台面均匀度分布圆直径大于400 mm的振动台均匀度前,应先测量振动台频响特性曲线。了解第一谐振频率大小,合理避开其影响的频率点,也能通过新版规程来判断0.7倍一阶谐振频率以上的频率是否满足规程要求。在做频响特性曲线时,为方便客户使用以及今后观察其频响特性曲线变化,应尽可能保存图形。
4 随机振动的检定
在做随机振动中动态范围检定时,新版规程检定方法6.3.18中,试验系统加速度功率谱控制动态范围谱图形由于排版问题频率点标错,在计量检定中,可以按照图1和表1在控制器输入参考谱形。
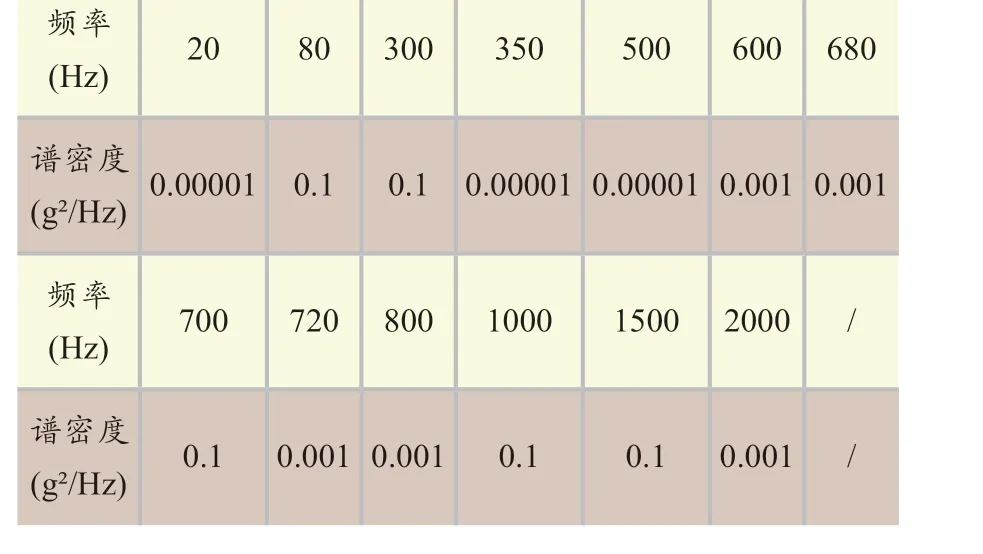
表1 参考目标谱设置频率和谱密度
检定随机功率谱密度横向振动比时,应注意不同于随机加速度横向振动比的测试方法。随机加速度横向振动比是直接读取三轴加速度X、Y、Z方向的均方根值,而随机功率谱密度横向振动比是采用分析仪中传递函数方法[4]。把X和Y方向的平直段分别与Z方向做传递函数,计算或测量其比值。
5 经典冲击的检定
新版规程列举了3种经典冲击波形,检定方法中也列举了3种波形的加速度幅值示值误差、脉冲宽度误差和脉冲速度变化量误差的计算方法[5]。通过咨询新规程主要起草人和归口单位,在振动台做冲击时也可以做其他的加速度和脉宽。通过公式计算出其加速度示值误差、脉冲宽度误差、脉冲速度变化量。这里分别给出3种波形不同加速度示值误差、脉冲宽度误差和脉冲速度变化量误差的计算公式。
5.1 半正弦冲击波形
其中,t——分析仪测量的脉冲宽度,ms;
t1——控制器设置的脉冲宽度,ms;
δt——半正弦波脉冲宽度误差。
其中,Am——分析仪脉冲加速度,m/s2;
Am1——控制器设置的脉冲加速度,m/s2
δAm——半正弦波脉冲加速度误差。
其中,δΔV1——半正弦波脉冲波形的速度变化量误差;
ΔV1——分析仪测量的速度变化量,m/s;
V——设置的半正弦速度变化量,m/s。
其中,π——圆周率值取3.14。
5.2 后峰锯齿冲击波形
后峰锯齿冲击波形的加速度幅值误差按照式(1)计算,脉冲宽度误差按照式(2)计算。
波形的速度变化量按照式(5)计算。
其中,δΔV2——后峰锯齿波脉冲波形的速度变化量误差;
ΔV2——分析仪测量的速度变化量,m/s;
V——后峰锯齿波脉冲波形的速度变化量,m/s。
5.3 梯形冲击波形
梯形冲击波形的加速度幅值误差按照式(1)计算,脉冲宽度误差按照式(2)计算。
波形的速度变化量按照式(7)计算。
其中,δΔV2——梯形波脉冲波形的速度变化量误差;
ΔV3——分析仪测量的速度变化量,m/s;
V——梯形脉冲波形的速度变化量,m/s。
其中,t上——梯形上底的脉冲宽度,ms;
t下——梯形下底的脉冲宽度,ms。
6 结束语
以上简单地介绍了新版规程中增加的检定项目和与旧版规程的不同,解释了一些删减和增加内容的原因,总结了一些在计量检定工作中遇到的问题和解决方法,为计量工作者在实际工作中提供参考和帮助。随着振动台的发展,检定规程也会随之修订,这要求计量检定工作的方法和方式也应当有所突破和创新,在实际工作中共同积累经验和解决问题。
