电流模BUCK DC-DC 变换器的系统建模与仿真*
2022-10-12刘颖异唐旭升
王 聪,刘颖异,唐旭升
(1.东南大学微电子学院,江苏无锡 214000;2.东南大学网络空间安全学院,南京 211102)
1 引言
开关电源变换器利用开关管的导通与截止对外围储能器件进行充放电,从而获得稳定的输出电压。开关电源因转换效率高、体积小等优点广泛应用于工业领域,如车载系统、航空、航天、可再生能源和直流电机驱动等领域[1-5]。由于开关电源变换器的开关操作是时变非线性的,因此对开关电源的建模分析非常困难。此外,由于各种寄生参数的干扰,控制电路的变化和外部负载的不确定性,使得DC-DC 变换器难以达到理想的变换效果,因而建立BUCK 型DC-DC 变换器的精确模型存在极大的挑战。
电流模式控制在电源管理中已经应用了很多年,相较于电压模式,电流模式不仅具有快速的瞬态响应,很高的输出电压精度,还能给电感电流限流以及提高过零检测转换效率[6]。文献[7]中提出的模型仅考虑了输出电压扰动对开关占空比的影响,文献[8]提出的连续时间模型仅能符合系统的低频特性,不能解释次谐波振荡产生的现象。文献[9]提出的精确离散时间和数据采样模型可以准确预测响应,但由于其公式的复杂性,并不能很好地应用于工程中。文献[10]提供了电压模变换器补偿网络的设计方法,但此方法并不适用于电流模式的开关电源转换器。
由于精确采样数据模型的复杂性,难以通过模型对实际电路进行分析,本文利用一个与精确采样数据模型高度相似的近似函数,将此近似函数与脉冲宽度调制(PWM)模式中其余模块的小信号模型相结合进行分析,得到了一个连续导通模式(CCM)下PWM 控制的电流模BUCK 变换器的小信号模型。该模型可以准确地预测从DC 到奈奎斯特频率处电路的特性,解释了电流模式次谐波振荡问题,能为补偿网络参数的选取指明方向。并通过对电路进行负载跳变的瞬态仿真,对本文提出的模型进行了验证。
2 功率级开关模型
一个BUCK 电路在稳态工作时,控制系统的主要模块有功率级模块、运算放大器和PWM 控制模块。功率级有2 个输入:输入电压和一定占空比的开关信号。开关信号是由PWM 模块根据输出电压VOUT的反馈结果得到的占空比可变的控制信号,占空比调节BUCK 外围储能元件充电与放电时间,进而调节输出电压VOUT,从而使输出电压稳定。文献[11]指出功率级的电压转换比与占空比是非线性的,这种非线性是开关功率管作用的结果。但是文献[11]也发现,通过对非线性元件一个开关周期内的电压与电流进行平均,可以得到开关功率管的线性模型。BUCK 功率级在连续导通模式(CCM)与不连续导通模式(DCM)2 种工作模式下的开关模型如图1 所示[12]。

图1 2 种工作模式下PWM 的功率级小信号模型[12]
在一个开关周期内,流经功率管的平均电流等于负载电流,当系统仅有负载电流发生变化时,功率级电感上的纹波电流不会发生变化。因此,在电路重载时,功率级工作模式为CCM;在电路轻载时,功率级工作模式为DCM,这2 个导通模式对应不同的PWM 开关模型。对BUCK 功率级进行建模是在一个开关周期内平均开关波形,并产生一个等效电路,以代替功率级开关管[12]。
3 精确的电流模模型
图2 是峰值电流控制的BUCK 电路,通过检测电流模块,将电感上的电流按一定倍数感应至占空比产生模块。占空比调制器模块产生一个占空比为D 的开关信号到BUCK 电路的功率级开关上,功率级开关通过给储能元件充放电进而控制电感上的电流,整个环路组成了电流内环,同时为了消除次谐波振荡,时钟模块将产生一个斜坡电流对电流内环进行补偿。输出电压VOUT经电阻分压得到反馈电压Vfb,该反馈电压Vfb与参考电压Vref之差经误差放大器处理后产生电压VE。将VE送到占空比调制模块中,通过控制产生的开关信号与开关功率级储能元件组成了电压外环。为了避免系统发生振荡,误差放大器需构造补偿网络。同时,由于输出电压VOUT存在一个与开关频率相同的微小纹波,此补偿网络能够降低误差放大器在此频率的增益,使得VE近似于一个定值。

图2 峰值电流控制的BUCK 电路
对于峰值电流控制的BUCK 转换器,仅通过离散时间模型来解释是不够的。需要通过电流检测建立离散时间模型,将此模型变换到连续时间域中,再与其他模型组合就能够得到电流采样的传递函数He(s),计算可得此传递函数He(s)为:

其中,s 为复频率,Ts为BUCK 系统的开关周期。
对于数据采样系统,开关电源转换器开关频率的一半也即奈奎斯特频率是可被建模的最高频率,根据文献[13],RIDLEY 提出了如式(2)所示的传递函数,该传递函数从DC 至奈奎斯特频率与电流采样传递函数He(s)具有十分相似的特性。此函数拥有2 个零点,表达式为:

式(2)中Qz=-2/π,ωn=π/Ts。因此,可以得到如图3 所示的PWM CCM 模式下的小信号模型。图3 中,D 为开关功率管的占空比;d^为占空比的小信号扰动;He(s)与Ri是图2 中电流检测的小信号传递函数;Fm是包含了斜坡补偿的占空比调制模块小信号传递函数;V^是误差放大器的小信号输出电压;图3 方框内为工作在CCM 模式下PWM 控制的开关管小信号模型;Kf′为电感电流受输入电压影响而变化的前馈增益;Kr′为电感电流受输出电压影响而变化的反馈增益;时钟模块与此小信号模型无关。
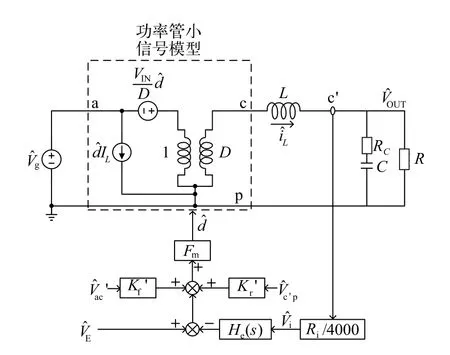
图3 峰值电流控制的CCM 模式BUCK 小信号模型
图3 中各参数的表达式见表1,表1 中Sn为感应的电感电流转换为电压的上升斜率,Se为斜坡补偿电流转换为电压的上升斜率。

表1 CCM 小信号模型中各变量对应值
4 斜坡补偿电流与补偿网络的设计
4.1 电流内环环路增益
在确定电流内环的环路增益时,可令误差放大器的输出电压VE为一个恒定值,同样输入电压VIN的扰动也为零,此时,可推导得出电流内环的传递函数为:

式(3)中:
电流内环的DC 增益为L/[(1-D)RTsmc],此DC增益与开关占空比成正比,与斜坡补偿大小成反比;[(1+sRC)/Δ(s)]He(s)表示电流内环所拥有的零极点,输出功率级的电感、电容和负载带来了2 个极点和1个低频零点,电流采样模块带来了与系统时钟频率相关的2 个零点。
图4 是不同斜坡补偿下,峰值电流控制BUCK 电路在占空比为0.4 时的电流环环路增益波特图。通过Virtuoso 软件利用AnalogLib 库中的理想器件搭建了图3 的小信号模型,对此小信号模型进行STB 仿真可得图4 的波特图。由图4 可知,斜坡补偿的大小不会改变电流内环环路增益的变化趋势,仅改变直流增益大小,从而使增益曲线发生垂直移动。当系统占空比为0.4 时,电流内环的相位裕度和增益裕度都很低。若系统占空比提高,电流内环的增益曲线将会垂直上移,相位裕度与增益裕度将会变得更低,最终导致电流内环不稳定,发生次谐波振荡问题。当斜坡补偿电流增大,电流内环增益曲线将垂直下移,从而提高电流内环的相位裕度和增益裕度。若占空比增大,可通过增大斜坡补偿值提升电流内环稳定性。因此,式(3)从传递函数的角度解释了次谐波振荡问题与斜坡补偿如何改变电流内环稳定性的问题。
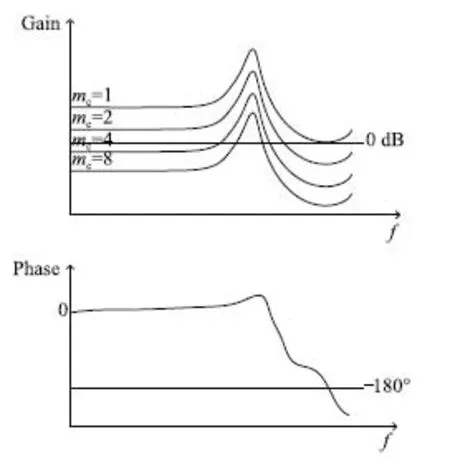
图4 不同斜坡补偿时电流内环环路增益波特图
4.2 控制到输出传输函数
在确定误差放大器输出到输出电压VOUT的传递函数时,可令输入电压VIN为一个定值,根据图3 的小信号模型,可求得:
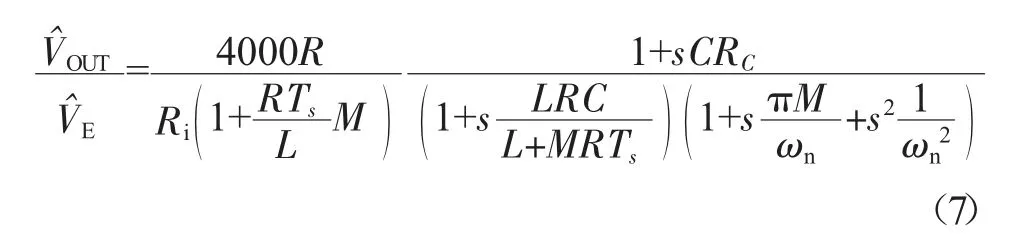
式中M=mc(1-D)-0.5。将式(7)改写为式(8),研究零极点对式(7)传递函数的影响。

式(8)中:

由式(7)可知,控制到输出的传递函数零极点由Fp(s)和Fh(s)决定。其中,Fp(s)包含了1 个零点和1 个极点,Fh(s)包含了2 个极点。Fp(s)决定了控制到输出传递函数波特图的低频变化特性,可从式中看出功率器件、负载、系统开关频率和斜坡补偿产生了系统的低频零点,储能电容的ESR 带来了高频零点。当添加更大的斜坡补偿时,低频极点ωp将向高频移动。
电流检测模块对系统的影响体现在传递函数Fh(s)中,它决定了控制到输出传递函数的高频特性,并带来了奈奎斯特频率处的极点对,Qp=1/(πM)为此极点对的品质因数,Qp依赖于系统开关的占空比和斜坡补偿值。在占空比D=0.6 时,Qp=1/[π(0.4mc=0.5)],随着mc的增大,Fh(s)的根轨迹见图5。
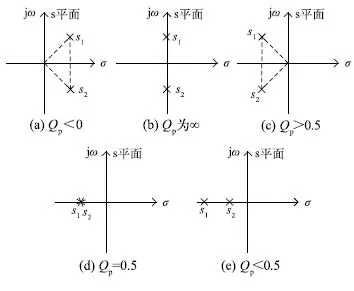
图5 斜坡补偿由0 增大带来的Fh(s)根轨迹变化
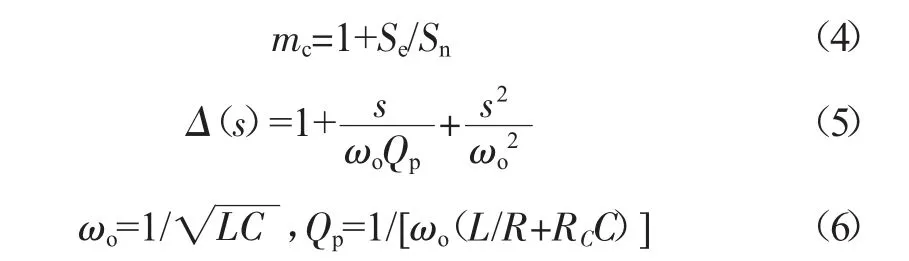
由传递函数Fh(s)的表达式可知,Fh(s)的波特图增益将会在fs/2 开关频率处存在一个峰值,峰值大小约为20 lg Qp,因此简单地令品质因数Qp=1,从而求得mc=1/[(1-D)πQp]+0.5/(1-D),进而求得斜坡补偿的大小Se=(mc-1)Sn,此时式(9)的波特图即为图6。
4.3 使用OTA 补偿网络的电压外环环路增益
将图3 得到的小信号模型添加补偿网络即可得到如图7 所示的整体BUCK 小信号模型,将图7 中V^E断开即可得到电压环路增益,见式(11),在确定了斜坡补偿mc的大小后,通过改变电压环路中补偿网络R1、C1、C2的大小,从而改变H(s)的零极点,可以得到电压环路想要得到的增益与相位裕度,补偿网络中C1远大于C2。在电流模式的BUCK 中,电压外环带宽fcross一般取开关频率的1/10~1/3。
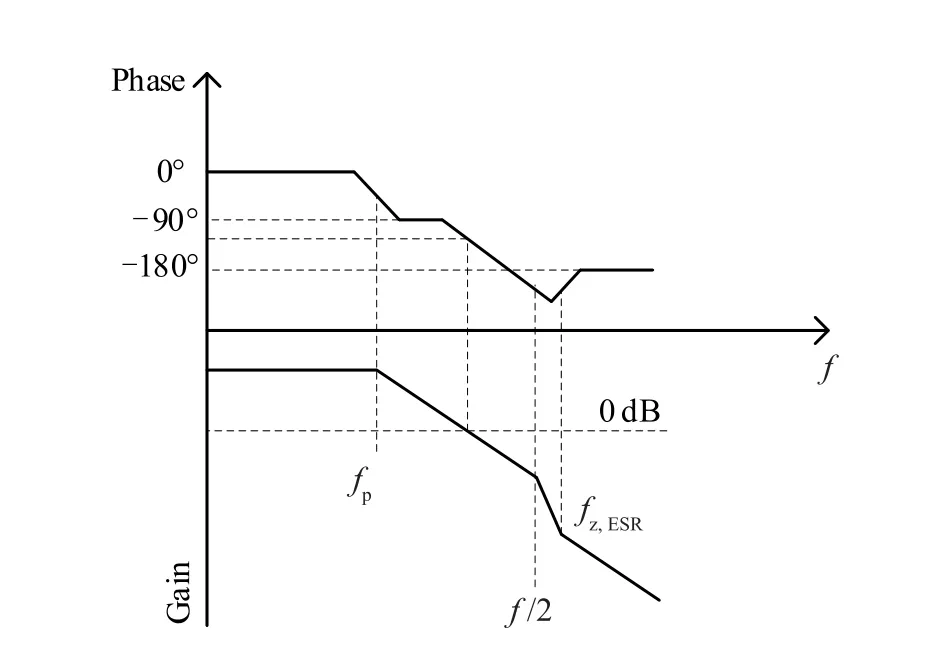
图6 QP=1 时控制到输出的波特图

将图7 所示的BUCK 小信号模型在Virtuoso 中构造,补偿网络使用实际误差放大器与电阻电容,小信号模型中其他参数使用Analoglib 库中的理想元件代替,并根据不同工艺角的仿真结果替换理想元件的参数,得到全工艺角下都能满足稳定性要求的参数。通过STB 仿真得到3 种典型工艺角(ff、tt、ss)下电压外环环路增益的波特图(见图8),仿真参数如表2 所示。在实际电路中减小了典型状态下的电压环路带宽,保证所有工艺角下的相位裕度都符合要求。
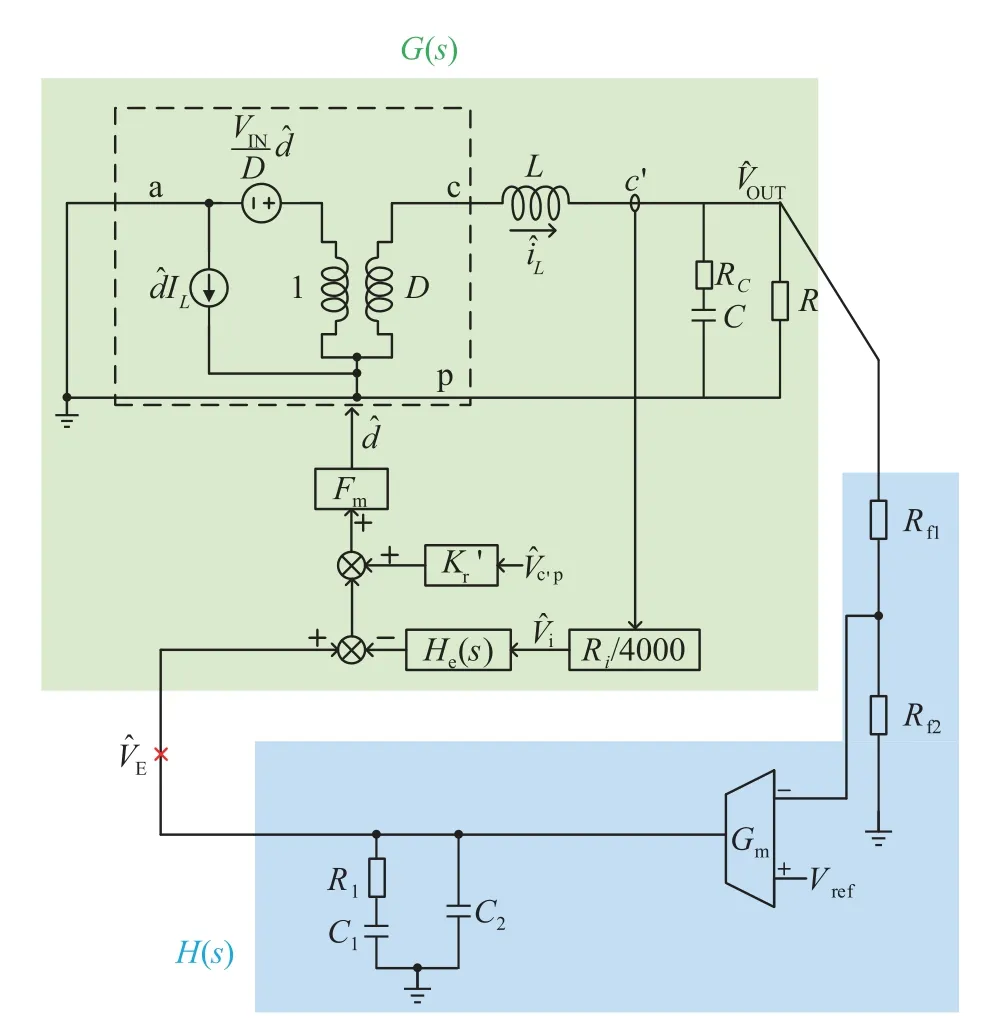
图7 包含补偿网络的BUCK 小信号模型

图8 小信号模型仿真波特图
图8 的STB 仿真结果表明,在表2 的仿真参数下,标准工艺角(tt,27 ℃)电压环带宽fcross约为49.42 kHz,相位裕度PM 约为58.68°;ss 工艺角0 ℃时电压环带宽fcross约为54.08 kHz,相位裕度PM 约为74.01°;ff 工艺角100 ℃时电压环带宽fcross约为44.55 kHz,相位裕度PM 约为16.38°;添加了补偿网络后能够保证系统在各个工艺角下的稳定性要求。与不添加补偿网络相比,系统带宽得到了提高,电压环的响应速度加快了。

表2 BUCK 变换器仿真参数
5 BUCK 的负载跳变仿真
通过仿真软件Virtuoso 搭建了整个峰值电流检测电路的BUCK 变换器,组成了完整的闭环控制系统,其中系统的仿真参数如表2 所示。瞬态仿真环境由输入信号(VIN)、BUCK 控制电路、储能元件(电感、电容)和负载4 部分组成。为了方便地仿真负载电流的变化,瞬态仿真环境使用AnalogLib 库中Ipwl(分段线性电流源)器件作为变换器输出负载,通过Ipwl 器件设置不同时间段内的电流大小,模拟在不同的负载电流下电路的工作状态,同时能够仿真出负载跳变对系统的影响。
图9 显示了负载电流由500 mA 跳变至100 mA时VOUT的变化情况,当负载由重载变轻时,储能电感中电流将对电容充电,输出电压变高。而补偿网络中的运放速度要远大于整体BUCK 的速度,因此当VOUT发生一个突变后,补偿网络的VE将降低,使得BUCK转换器的占空比变小,从而使VOUT逐步降低,最后系统重新恢复到稳定状态。从图9 的仿真结果可以看出,实际电路在负载跳变的情况下所表现出的瞬态波形符合本文小信号模型稳定性仿真得到的图8 波特图中所对应的时域波形。受工艺角影响,由于负载的变化ff工艺角由PWM 控制模式切换为脉冲跨周期控制模式,本文提出的BUCK 变换器版图在绘制时需仔细计算开关管和续流管上金属电流的大小,从而确定开关管和续流管版图的面积,同时需要对版图中的关键信号做好屏蔽处理。
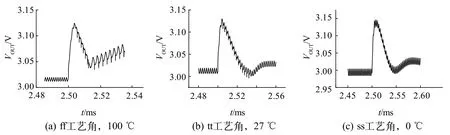
图9 负载由500 mA 跳变至100 mA 时的瞬态仿真结果
6 结论
本文描述了一种用于峰值电流控制PWM 的BUCK 开关电源转换器的小信号模型。该模型能够精准预测从DC 到系统一半开关频率处的电路特性。模型采用简单的零极点传输函数,不需要离散时间Z 变换即可预测开关电源转换器中的次谐波振荡问题;同时提出了一个近似函数,该函数在一半开关频率前能够准确描述电流模的采样数据模型。
根据本文推导所得的电流模传输函数,电流模环路增益有一对RHP 零点,当占空比超过50%,在没有斜坡补偿的情况下,将会导致电流环路不稳定。由于电流模的作用,误差放大器的控制到输出将会包含一个ESR 带来的高频零点、一个低频极点和一对高频极点,这两个高频极点处于开关频率的一半处,当占空比超过50%且无斜坡补偿时,这个极点对将会是一对RHP 极点,通过添加外部斜坡补偿来改变此极点对的位置,当斜坡补偿值很大时将会在实轴上分裂为两实数极点,传输函数将由电流模特性逐步变为电压模特性。
本文所提出的模型很容易构建到任何电路分析程序中(如Virtuoso),并且可以根据仿真结果显示出随着斜坡补偿的增大,系统从电流模式到电压模式的过渡。本文的建模主要集中分析了后沿调制型CCM的电流模BUCK,但是这些方法也可以应用到BOOS T 与BUCK-BOOST 中。
