虚实结合的工业机器人实训教学平台和方法*
2022-10-09刘扬开王晓军
高 攀,邹 胤,汤 超,刘扬开,王晓军
(广东技术师范大学工业中心,广州 510665)
0 引言
制造业是国民经济的支柱产业,进入21 世纪,世界范围内掀起了新一轮的科技革命和产业革命,以互联网、新能源、新材料、生物科学,机器人技术[1-3]为代表的技术得到了蓬勃发展,深深地改变着世界竞争格局和历史进程。同时对传统教育教学模式也产生较大的冲击,尤其是机械、车辆、自动化等工科学生,在当前互联网的超强渗透下,大量自动化、智能化、网联化的新技术在改造升级甚至颠覆传统的制造产业,产业变革的一个明显特征便是学科之间的界限越来越模糊,不同学科之间不断融合交叉,这些变化对于传统学科、旧体系教学方法都提出了严峻的挑战,新工科建设便是应对这一挑战做出的正面回应,教育部高等教育司发布《关于开展新工科研究与实践的通知》[4],新工科提倡学科的交叉性、综合性,着力培养新兴工程科技创新和产业创新人才,服务产业转型升级。
工程训练作为工科学生最为重要的实践教学平台,肩负着培养学生实践能力和创新意识的重任,是理论知识与工程实践、工业制造之间的桥梁。传统的工程训练包括车、铣、刨、磨、钳、铸造、锻造等,近年为响应国家号召和适应产业变革,数控、加工中心、机器人、3D 打印等一系列新设备不断投入教学研究中,教学学时也逐年增加,但受制于设备情况和教师现状,仍存在着较多的问题,不能满足学生的学习需求和教学要求。以工业机器人为例,从20 世纪中期,随着计算机,自动控制原理技术的成熟,应用于数控机床的控制系统,伺服电机、减速器得到快速的发展,为工业机器人的发展奠定了坚实的基础[5],但目前工业机器人设备昂贵,建设初期数量较少,留白时间较长,不能满足学生上课操作需求,机器人操作复杂,初期上手较难,讲解浮于表面不能深入,学习效果有限等问题,严重制约着机器人实践教学效果,亟需优化实践教学平台流程,丰富和优化教学方法,提高教学质量和效率[6]。
本文从政策要求和教学实际出发,提出建立了一种虚实结合的工业机器人实训教学平台和方法,包括机器人实体操作平台和和虚拟仿真平台。其中实体操作平台主要采用业内知名厂商机器人产品搭建,有串联六自由度机器人、并联机器人、双臂机器人,虚拟仿真平台包括基于Matlab的机器人运动学和动力学虚拟仿真和基于RobotStudio的机器人编程和动画仿真,实现了两种平台之间的优势互补,极大提高了学生的参与度和积极性,加深学生对于理论知识的理解和掌握,实现实践教学目标。
1 工业机器人实体平台搭建
1.1 实体平台要求
实训最重要的特点是实践性,让学生有更长的时间去操作设备,熟练掌握设备的基本结构组成、工作原理和操作技巧,与理论知识相互印证,寄希望将来在此基础上能进一步创新创造,但受制于实训设备数量不足,功能单一,实训项目简单,理论知识枯燥,计算繁琐等客观条件,学生实训效果和教学效果都未完全达到预期,因此新开发的工业机器人实训教学平台有以下几个方面的要求:(1)尽可能增加机器人数量,减少学生操作留白,提高学习效率;(2)丰富机器人品种,虽然各个品牌机器人结构形式和组成越来越趋于一致,但控制逻辑操作方法仍有差异,对比掌握;(3)增加单台机器人的功能模块,尽可能在一台机器人本体结构周边提供尽可能多的功能模块,循序渐进提升操作所需技能。
1.2 实体平台搭建
基于以上要求,中心搭建的工业机器人实训工作平台如图1 所示,整体可分为桌面型工业机器人和落地式工业机器人,其中桌面型工业机器人体型较小,布置灵活,开放式布局,非常适于教学;落地式工业机器人尺寸较大,其工作范围和负载能力更强,更加贴合产线实际生产,各个机器人实训工作基本组成大体一致,都包括机器人系统本体模块、功能实训模块、触控显示编程系统等,其中机器人系统本体和控制器是整个实训工作站的核心,采用市场成熟产品,根据自身教学和科研需求设计功能实训模块,具体介绍如下。
1.2.1 桌面型工业机器人
(1)双臂机器人实训工作站(ABB),如图1 标号1 所示,机器人本体采用ABB 机器人IRB 14000 型,有效负载0.5 kg;臂展0.5 m,配2 个伺服夹爪、1 个视觉、1 个真空,配备有清洁器装配实训模块和物块视觉分拣实训模块。
(2)六轴工业机器人多功能实训工作站(ABB),机器人本体采用ABB 机器人IRB 120 型,采用IRC5C 紧凑型控制器,如图1标号2所示,有效负载为3 kg,臂展0.58 m,配1个真空,1个循迹指针,配备有描图、打磨抛光、装配、涂胶、码垛、自动送料、拾取物料、物料搬运等实训模块,详细如图2所示。

图1 工业机器人实训工作平台

图2 桌面型工业机器人多功能实训工作站(ABB-IRB120)
(3)六轴多功能实训工作站(库卡),如图1 标号3 所示,机器人本体采用库卡KR3R540型机器人,负载3 kg,动态范围0.541 m,具有结构紧凑、电线内置、干扰轮廓小等特征,配备有描图和码垛实训模块。
(4)六轴多功能实训工作站(安川),如图1 标号4 所示,机器人本体采用安川MOTOMAN-GP7 型机器人,负载7 kg,动态范围0.927 m,广泛应用于搬运、取件/包装、码垛、组装/分装等场合,配备有描图和码垛实训模块。
(5)六轴工业机器人多功能实训工作站(Fanuc),如图1标号5 所示,机器人本体采用Fanuc LRMate200iD-4s 型机器人,负载4 kg,动态范围0.55 m,配1 个真空,1 个循迹指针,配备有描图、打磨抛光、装配、涂胶、码垛、自动送料、拾取物料、物料搬运等实训模块。
(6)并联型机器人多功能实训工作站(Fanuc),如图1 标号6 所示,机器人本体采用Fanuc/M/1iA/0.5SL 并联型蜘蛛手机器人,负载0.5 kg,动态范围0.42 m,动作敏捷,结构紧凑,广泛应用于电子行业,配备了物料分拣、视觉码垛、轨迹描绘、涂胶等实训模块。
1.2.2 落地型工业机器人
(1)六轴工业机器人多功能实训工作站(Fanuc),如图1标号7所示,机器人本体采用FanucM-20iD/25六轴机器人,负载25 kg,动态范围1.83 m,结构紧凑,刚度大,响应快速,配双吸盘夹具、吸盘夹手夹具、1 个真空,配备有视觉码垛、搬运、监测分拣以及装配等实训模块。
(2)移动上下料工业机器人实训工作站(Fanuc),如图1标号8所示,机器人本体采用FanucM-20iD/25六轴机器人,采用R-30iB Mate Plus 控制器,机器人安装在一个高精度直线导轨系统上,大大增加机器人的活动范围,配有多工位钻孔加工平台,机器视觉检测平台,智能立体仓库等,配备有机器视觉码垛、移动上下料、多孔位钻孔加工等实训模块。
整个工业机器人实训平台整体是开放式布局,囊括了ABB,发那科,KUKA,安川等市场主流品牌机器人品牌和系统,包含双臂型、并联型、串联型等各种机器人结构形式,具备描图、打磨抛光、装配、涂胶、码垛、自动送料、拾取物料、物料搬运等实训模块,可以充分满足学生实训、竞赛科创、教工科研等各种需求。
2 工业机器人虚拟仿真平台搭建
2.1 基于Matlab的工业机器人虚拟仿真平台搭建
机器人实训离不开实践练习,但是如要理解机器人关节运动、电机选型、速度控制等理论知识,虚拟仿真技术具有较大的优势,在机器人学的理论教学中,通常都偏重于理论知识,尤其是矩阵和控制原理的介绍,繁琐抽象的公式和计算降低了学生的学习热情,以Matlab为基础的软件教学作为理论教学的补充,尤其是基于Matlab 的机器人工具箱[7],不仅可以方便依据机器人结构参数快速进行本体建模,完成运动学和动力学仿真,还可以研究多项式路径规划、抛物线路径规划、多段分割路劲规划及各种先进算法等,基于Matlab机器人工具箱的教学思路流程如图3所示。

图3 基于机器人工具箱的教学思路
基于Matlab/Simulink 的机器人工具箱建模最为常用的方法是DH 参数法或者MDH 参数法进行,图4 所示为MDH 坐标参数建模规范,只需要确定杆件长度a、杆件扭角α、关节转角θ、关节距离d四个参数便可以建立机器人本体模型,从参数来看,MDH 参数中各个参数的物理意义与标准DH 参数是一样的,从功能来看,对于大多数串联型机器人而言,其表现能力都是一样的,不同的地方是MDH法能够克服DH不能应用于平行轴和闭环机构的缺点[8];从教学内容来看,两者之间并没有本质的区别,不会大幅增加课时量,因此在教学中将分别讲解DH参数法和MDH参数法,并对比其建模异同之处。

图4 MDH坐标参数建模规范
选定建模方法后,根据机器人本体结构参数进行相应坐标系的建立,这部分是进行模型建立的基础,技巧性强,需要较多讲解和练习,图5 所示为IRB120 机器人工作站尺寸参数图,其中包含根据MDH 要求建立的坐标系,依据坐标系便可以方便写出MDH 参数表,如表1 所示,针对MDH 参数表,各个坐标的位姿矩阵连乘得到最后一个驱动关节上的坐标系到机器人基坐标系的齐次变换矩阵,如果要得到末端工具坐标还需要增加一个平移变换,这也是MDH参数比DH参数表多一行,即多了一个平移变换矩阵,值得注意的是,不管是DH或者MDH参数表并不是唯一的,与坐标系的选取和坐标轴的方向有关,但是无论何种方法,计算得到的末端空间坐标应该是一致的。

图5 IRB120尺寸参数和坐标系建立

表1 IRB120型号机器人MDH参数表
依据所得到的DH 或MDH 参数表,基于Matlab robotics toolbox建立IRB120机器人构型图,如图6所示,采用示教显示机器人,可方便调整6 个关节角度,能够让初学者更好地了解六轴机器人的结构,另外通过6 个关节角度的调整使得所建立的模型零位姿态和实体模型相对应,进而进行虚拟模型与实体模型互相验证。
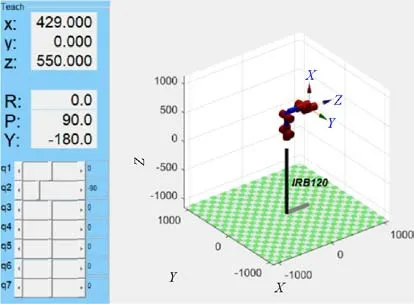
图6 基于MDH法的IRB120机器人构型
模型搭建完成后,采用任务驱动式的教学方法,目前已经开发的教学任务有3个。
(1)机器人运动学正解,即给定各个关节的运动参数,求取末端执行器相对参考系(一般为大地基坐标)的位姿;如图7 所示为IRB120 型机器人运动学正解示意图,给定6 个关节的转动角度,可方便求得到末端执行器的位姿。

图7 IRB120机器人运动学正解示意图
(2)机器人运动学逆解,即给定满足工作要求的末端执行器相对参考坐标的位姿,求取关节的运动参数,运动学逆解求取一般会得到多组满足条件的解,其中会有一组解是最优的,因此在求取过程中需要对满足条件的解进行筛选。IRB120 型机器人其运动轴线满足Pieper 准则[9],因此具有封闭解,可方便通过fkine函数进行求解,大幅度降低计算量。
(3)机器人路径规划[10],即给定一定的物理约束条件,机器人完成设定任务和动作所设计的运动序列安排,通俗解释就是机器人找到一条起始点到目标点的合适路径,目前进行轨迹规划的方案主要有两种,基于关节空间方案和基于直角坐标方案,出于两种方案在实践中的应用情况,在教学中以讲解关节空间求解为主,如图8 所示为基于多项式优化的末端执行器从起始位置(429,0,550)到目标位置(-400,100,400)的路径规划,运动路径和关节速度较为平滑。
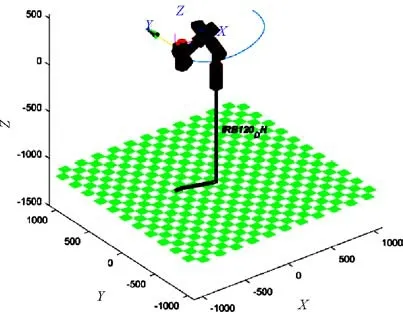
图8 IRB120机器人路径规划示意图
2.2 基于RobotStudio的工业机器人虚拟仿真平台搭建
RobotStudio[11-12]是全球广泛使用的机器人离线编程软件,由瑞士ABB 公司开发,其最大的优势是可以快速建立与现实生产场景高度吻合的虚拟场景,并能在不停产停机情况下进行离线仿真,因此非常便于在不影响生产的情况下执行培训、编程和优化等任务,可有效降低风险、快速调试,提高机器人使用效率,广泛应用于增强现实,数字孪生以及虚拟调试的场合。RobotStudio 可以兼容主流3D 建模软件模型,方便调用模型库中ABB 机器人模型和建立控制器,可以像使用实际示教器对机器人进行操作和编程,离散验证程序的正确性,程序无需任何的转换便可以下载到实际机器人中进行使用,正是由于RobotStudio 的易用性和强大功能,得到了许多高校教学的青睐[13-14],基于此在机器人编程和动画仿真教学方面采用RobotStudio作为主要的教学软件。
基于RobotStudio建立一个可以离线编程的机器人虚拟平台一般需要3 个步骤[13],工作站模型搭建,Smart 组件设计和I/O连接及工作站逻辑设计3 个阶段,RobotStudio 重在仿真和智能环境的搭建,造型功能薄弱,一般是从主流CAD 软件导入建好的模型,支持STP 和SAL 格式[15],调整位置形成仿真平台框架;接下来添加Smart 组件,赋予模型动作和逻辑属性连接,模拟真实机器人的动作过程,最后在控制器设计中将Smart 组件和机器人的输入输出接口通过I/O 端口相互关联,模拟数据通信,便可以进行RAPID 离线编程,如图9(a)所示为ABB/IRB120 桌面型机器人虚拟仿真平台,如图9(b)所示为Fanuc/M-20iD/25 落地式机器人虚拟仿真平台,限于篇幅,其他机器人虚拟工作站没有展示,多平台、多功能的虚拟仿真平台可以充分满足教学和科研需求。

图9 基于Robotstudio的机器人虚拟仿真平台
3 实体平台与虚拟仿真平台融合和应用
实践出真知,也是创新的基础,无论是机器人实体平台还是虚拟仿真平台都需要学生动手操作,加深理论知识理解和掌握操作技能,基于本校专业人才培养目标、企业用工需求、及理论和实践课程之间联系的原则,机器人教学平台和教学方法采用虚实结合、循序渐进、从面到点、任务驱动的实训教学模式,构建以实训操作过程与结果相结合的评价体系,具体操作过程如表2 所示。第一阶段,通过PPT 讲解使学生了解工业整体结构和各个部分组成,然后通过实体平台讲解和演示学习应用操作,如手动自动操作模式,空间笛卡尔坐标关节坐标的差异,形成一个整体的感性认识;第二阶段,需掌握基于Matlab的机器人建模技术,进行正逆运动学求解和初步路径规划,掌握基于RobotStudio机器人仿真环境搭建,具备机器人运动学和动力学分析能力,机器人离线编程能力;第三阶段为探索性质的教学,可研究在约束条件下的效果更好的路径规划算法,如蚁群算法等,其次可以更加深入地研究机器人某一个方面的问题,以及机器人应用领域的拓展等,为研究生和教师提供良好的科研平台。
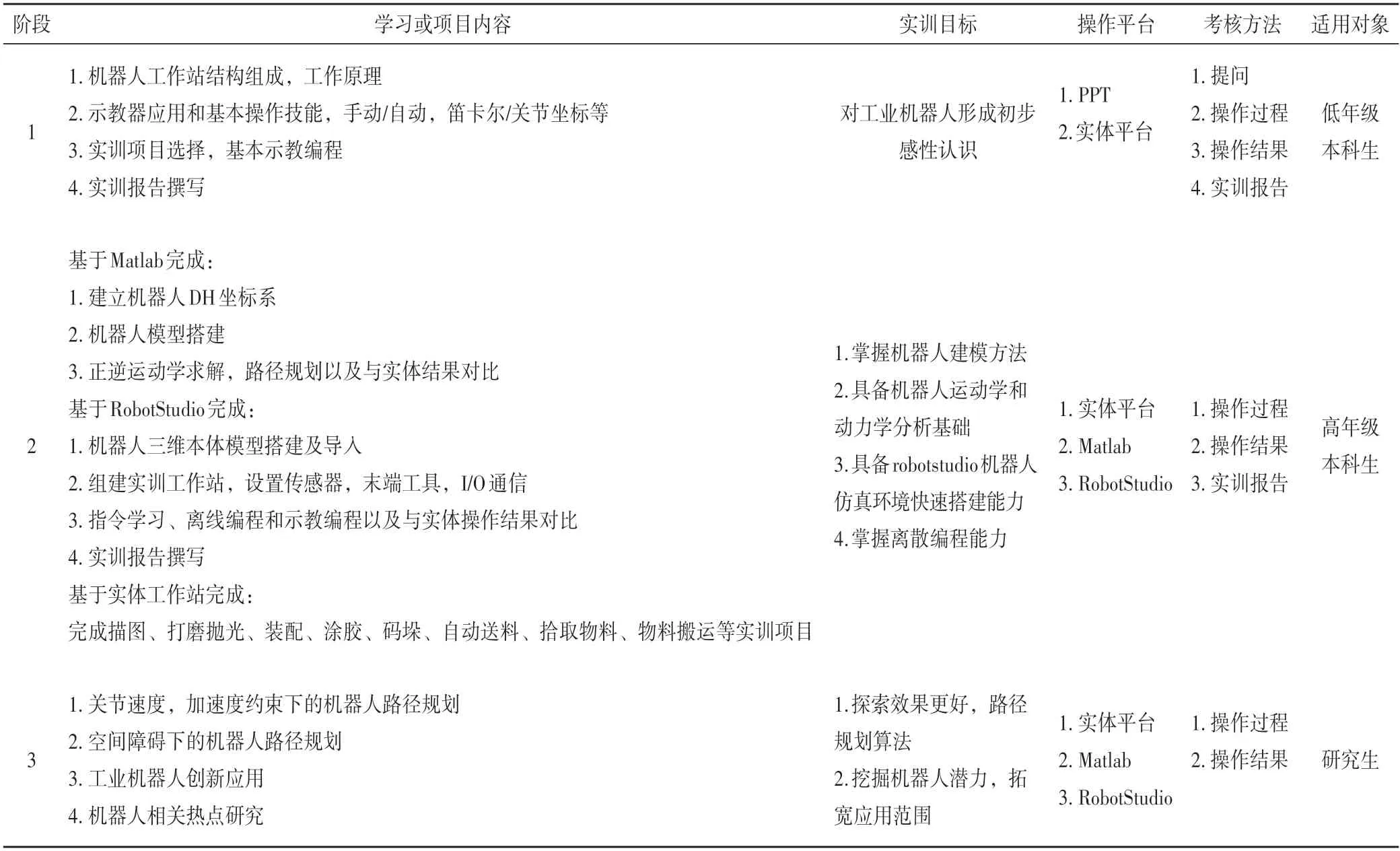
表2 实体平台与虚拟平台融合和应用
总的来看,采用自上而下的学习方法,从机器人的整体介绍和操作入手,可以有效地激发学生的积极性和主动性,然后结合Matlab虚拟仿真平台,可以快速建立机器人运动学和动力学模型,避免了繁琐的计算,快速验证设计思想,并且运动学结果位移、速度、加速度可以映射为关节的扭矩和关节力,为关节电机选型、机械臂设计提供边界,为将来设计机器人硬件打下基础,结合RobotStudio虚拟仿真平台,可以清楚了解机器人的控制逻辑和通信,低成本的验证编程程序,为设计机器人软件、控制系统的设计也打下一个很好的基础,虚实结合的机器人平台和教学方法克服了传统教学过程中场地、时间、空间和安全的限制,可有效提升了教学效率和质量。
4 结束语
机器人不仅是国家战略性新兴产业之一,同时也是工科学生学习和研究的极佳载体之一,涉及机械、传感器、控制、计算机、软件编程等各个专业领域,传统单一的教学法根本不能满足实际机器人相关专业的培养要求,亟需搭建新的实践平台和开发研究新的教学方法,基于此目标,本文以机器人实训为切入口,基于机器人实训设备数量少、教学效果差等问题,提出了一种虚实结合的工业机器人实训教学平台和方法,包括机器人实体操作平台和虚拟仿真平台,机器人实体工作平台设计多品牌、多种类机器人,包括描图、打磨抛光、装配、涂胶、码垛、自动送料、拾取、物料搬运等实训项目,虚拟工作平台包括基于Matlab 的机器人运动学和动力学虚拟仿真,基于RobotStudio 的机器人离散编程和动画仿真,新平台新技术引进新的教学方法,实现了各个平台优势互补,充分提高理论在实践中的应用,同时也弥合了传统实践教学与理论教学的脱节,每个学期累计服务师生1 000 人次,不仅大大提升教学效率和质量,同时也提升相关教师的科研专业素养,可为相关院校工程训练尤其是机器人教学提供参考。
未来将在此平台基础上继续进行开发,以实际问题为导向,继续深挖实体平台潜力和虚拟平台技巧,以及平台的扩展,如机器人视觉、激光追踪仪等装备,以及设计过程中机械臂的有限元仿真、散热分析、控制逻辑仿真等,持续丰富完善新平台进一步为更多师生服务。
