基于多源信息的机器人移动轨迹智能跟踪系统*
2022-09-29杨小艳
杨小艳
(安康学院电子与信息工程学院,陕西 安康 725000)
1 引言
机器人是一种依赖于人工智能技术的新型机械产品,目前应用于多个领域,极大地提升了各行业的生产效率[1-2]。可移动机器人具有对周围环境的感知能力、运动能力以及自我调节能力,同时结构简单,运动灵活。近几年人工智能技术的不断进步使得可移动机器人应用到更多的领域中,成为机器人领域研究的主要问题。
在可移动机器人使用的过程中,如何对其运动轨迹展开控制是目前机器人控制技术中需要解决的主要问题。在过去的研究中,国内外学者提出了多种机器人跟踪技术,例如文献[3]中提出了一种利用预演信息实现机器人控制的方法,针对运动学模型设计虚拟控制器,建立了虚拟控制器的离散时间线性状态空间模型,基于Riccati方程的解,获取最优预演控制策略的反馈增益。此方法适用于任意离散信息,具有较好的使用效果[3]。文献[4]中提出了一种迭代平方根中心差分卡尔曼滤波定位算法的机器人跟踪技术,使用中心差分变换处理SLAM的非线性问题,在滤波更新过程中,通过直接传递协方差矩阵的平方根因子减少算法的复杂度,使用列文伯格-马夸尔特优化方法引入调节参数,实时修正协方差矩阵。具有较高的定位精度。在实际中,当前机器人移动轨迹智能跟踪过程,由于信息不断变化,当前方法还存在一定的不足,如机器人移动轨迹智能跟踪结果不稳定,机器人移动轨迹智能跟踪实时性差。
为了获得更理想的机器人移动轨迹智能跟踪结果,本文提出了基于多源信息的机器人移动轨迹智能跟踪系统,并对其性能进行了测试。
2 多源信息的机器人移动轨迹智能跟踪系统
将多源信息应用到机器人定位中,以降低机器人定位计算量,提高机器追踪效果。多源信息采集过程和分析具体如图1所示。根据图1采集流程,完成多源信息的过程,将采集到的信息应用到机器人移动轨迹的跟踪过程中,获取此部分中的有利因素,为机器人移动轨迹跟踪提供计算参数,以此提高机器人移动轨迹跟踪的有效性与精度。

图1 多源信息采集流程
2.1 构建机器人移动模型
在以往的研究中多使用机器人动力学模型作为机器人移动轨迹跟踪的数据来源,此模型在应用过程中需要进行大量的计算,使用过程复杂。因此本文构建机器人预测控制模型对原有的动力学模型展开优化,根据文献研究结果,选用MPC控制原理[5]作为模型构建依据,通过机器人动作之间的连接性,确定机器人的移动特征。MPC控制原理如图2所示。
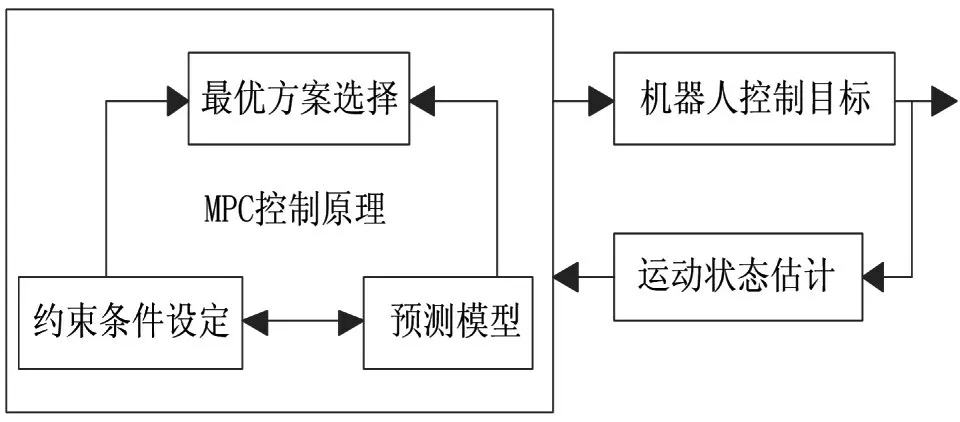
图2 MPC控制原理示意图
把机器人的运动过程划分为控制和状态估计三个部分,根据此原理增加了尺度变换,从而保证了机器人运动变量计算的准确性。将机器人模型的动力变量取值域设定为{-a,-(a-1),…,0,1,a-1,a},其基本取值域设定为[-|bmax|,|bmax|],同时,将变换因子设定为cb=。根据上述设定结果可知,机器人模型的动力变量模糊取值域设定为{-x,-(x-1),…,0,1,x-1,x},基本取值域可表示为[-|ymax|,|ymax|],则输出变化因子可表示为cb=。使用以上设定条件,得到变量与动力学模型的隶属关系函数,具体内容如下:

使用上述公式得到隶属函数,使用中位数法对其展开处理,以得到可靠的数据。具体公式如下所示:

式中,α'表示隶属函数的中位值,并根据上述隶属关系函数和隶属关系函数的中位值,构建机器人移动模型,具体内容如下:

使用此数据控制模拟控制值,并将其应用到机器人动力学模型中,将优化后的模型作为数据来源与基础。
2.2 多源信息融合
当前多源信息融合过程大致可分为物理模型、参数分类以及知识库模型三部分[6-7]。由于机器人运动过程中涉及大量的不同源信息,将神经网络[8]作为数据融合的基础。首先根据机器人多源信息的特征,构建神经网络,为保证此网络具有应用价值,将对神经元个数展开验证,具体公式如下:

式中,g表示神经网络中基础单位总个数;q表示网络输入层基础单位个数;p表示数据输出层单位个数;d表示计算过程中涉及的常数。
使用激活函数激活神经网络功能,具体如下:
对于大数据(big data),目前还没有一个统一、权威的定义,较为普遍接受的观点是,大数据指在一定时间范围内无法用常规软件工具进行捕捉、管理和处理的数据集合。国务院印发的《促进大数据发展行动纲要》指出,大数据具有容量大、类型多、存取速度快、应用价值高的特征。大数据价值的基本实现方式是数据分析和数据挖掘。

设待融合数据为:Ri,i=1,2,..n,建立多源信息融合框架H={R1,R2,…,Rn},根据信息之间的冲突完成融合处理,融合过程如下:


利用该公式完成多源信息融合,得到多源信息融合结果,具体如下:

将多源信息融合后的结果作为约束条件和机器人移动
轨迹跟踪的技术参数。
2.3 机器人移动轨迹跟踪
将多源信息融合结果作为机器人移动轨迹跟踪的基础,设计机器人移动轨迹跟踪算法。对于机器人在运动范围Y(v)的移动轨迹,将多源信息结果作为移动特征,在此运动区域内可提取到的有效运动信息可表示为:

式中,D(v)表示有效运动信息,(i,j)表示多源信息融合结果。

式中,dep(v)表示运动范围中可跟踪路径;表示目标区域内有效的跟踪数据。
根据多源信息使用原理,对上述公式中获取路径数据相似度[9-10]展开计算,避免出现路径跟踪偏差的问题。

式中,W(P,Q)表示路径数据与目标区域的相似度;U(P)与U(Q)表示路径数据与多源数据之间的关联性;ε表示此部分计算中的加权系数。根据上述函数对获取到的路径数据进行验证,可证实数据之间的关联性时,将数据进行串联得到机器人移动轨迹。
本文主要对多源数据的处理与应用展开设计,将此部分与当前机器人移动轨迹跟踪方法有效融合。至此,基于多源信息的机器人移动轨迹智能跟踪系统设计完成。
3 仿真实验
3.1 实验平台参数
为了分析多源信息的机器人移动轨迹智能跟踪效果,进行仿真实验,仿真实验参数设定如表1所示。

表1 实验平台参数
根据表1 实验平台参数,构建实验平台,并在此平台中设定相应仿真实验环境以及机器人移动轨迹,具体环境如图3所示。使用多源信息方法与单源信息方法对机器人移动轨迹跟踪对比测试。将仿真实验结果评价指标为机器人追踪定位误差、信息使用率以及机器人追踪响应时间。

图3 仿真环境与机器人运动路径
机器人移动轨迹跟踪仿真图如图4所示。
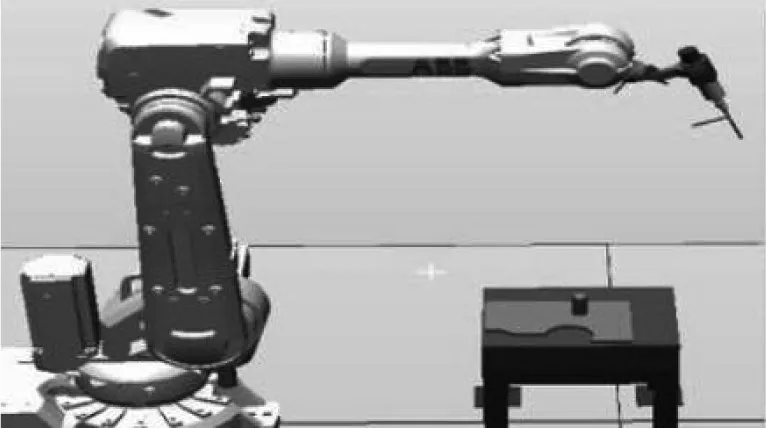
图4 机器人移动轨迹跟踪仿真图
3.2 结果与分析
不同方法的机器人轨迹跟踪结果如图5所示。根据图5可以看出,在机器人轨迹跟踪的前半段,三种实验方法均可获取高精度的机器人轨迹跟踪结果。但在机器人轨迹跟踪的后半段,2种方法的使用效果出现了一定的差异。由于跟踪后半段环境中障碍物较多,单源信息法的问题暴露,出现了大量跟踪误差情况,单源信息法的跟踪结果不会对后续的研究提供帮助。多源信息方法在复杂的仿真环境中,机器人追踪定位误差较小,可得到可靠性较高的跟踪结果。
不同方法的机器人移动信息使用率如表2所示。对表2数据进行分析后可以发现,在机器人移动轨迹跟踪的过程中,多源信息方法的信息应用率较高,由于该方法使用机器人信息与环境信息作为机器人轨迹追踪的基础,因此使用的信息量较大。单源信息法的信息利用率低,说明了传统法对于机器人运动信息分析能力较差,无法更好地对机器人的运行信息进行分析,追踪效果较差。

表2 机器人移动信息使用率
为了对多源信息方法与当前方法进行更加系统地分析,将对机器人追踪方法的响应时间进行分析。实验结果如表3所示,从表3 可知,多源信息方法可以在最短的时间内完成机器人追踪过程,机器人追踪响应时间明显少于单源信息法,加快了机器人追踪速度。
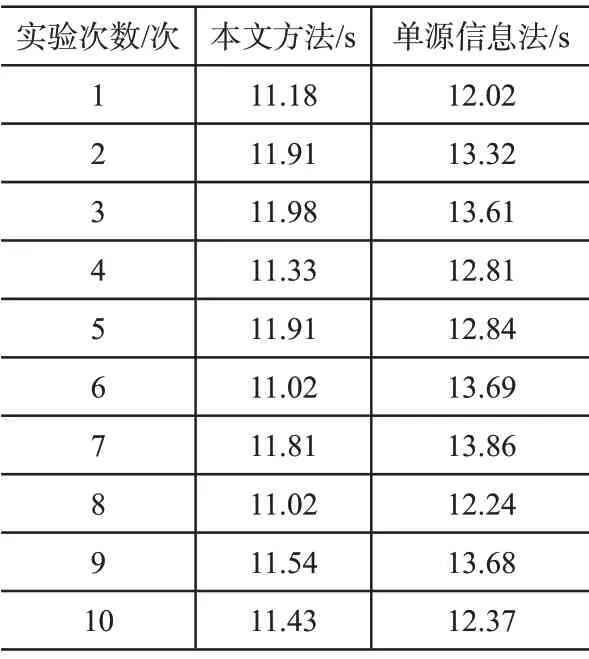
表3 机器人追踪响应时间
对本次实验中的三组实验结果进行融合分析可以发现,多源信息方法的使用效果优于当前方法的使用效果,其具有较高的定位追踪能力。
4 结束语
为对机器人运动情况进行高精度控制与分析,提出了基于多源信息的机器人移动轨迹智能跟踪系统,结果表明,本文方法提升了机器人跟踪精度,具有十分广泛的应用范围。
