水稻分蘖颗粒肥无人机投放电控系统设计
2022-09-29吕霞
吕 霞
(辽宁省农业机械化研究所,沈阳 110161)
水稻分蘖期需要大量的氮、钾、磷元素。传统水稻施肥大多是人工施撒,效率低,耗费大量人力资源,而现有的机械施肥装置体积大,行走受限。为此,设计一种无人机投放化肥装备。其投放系统通过电控系统操控,完成不受地形限制的高效率精准施肥功能。 阐述撒肥机数据控制信号的来源,分析电控系统内部控制模块选用及所选STC89C51RC 芯片的软件算法,以期为水稻分蘖颗粒肥无人机投放提供参考。
1 水稻分蘖期数据控制信号的来源
划分2 个区域作为试验田,分别作为采集组和对照组。 采集测定对照组内的稻田土壤、水体和水稻的氮、钾、磷含量,并对采集数据进行处理,作为验证采集组准确性的参考。采集组用六旋翼无人机进行高光谱检测拍照,于早7 点到9 点进行采集,防止阳光光照过强导致光谱污染。无人机采集区域设立几个交点定点,保证无人机在指定轨道飞行。
高光谱成像方法是先经过影像预处理提取一些波值,采集定点数据后进行几何精校正,通过定点值、矢量方向描绘出大致影像,再进行影像处理。然后,通过直方图匹配、色彩合成、影像拼接合成直观图影像。高光谱成像过程如图1 所示。
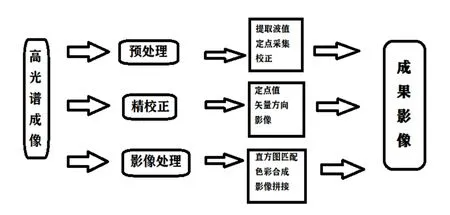
图1 高光谱成像过程Figure 1 Hyperspectral imaging process
光谱图像中含有土壤、水体、水稻3 种物质。为得到水稻内的元素含量,需要进行图像解混,用最小噪声法将噪声分离开,提取水稻内的元素含量。 通过算法绘出曲线图,提取水稻元素含量数据。 数据信号为肥料施撒量的标准。
2 撒肥机内部控制模块的选用
2.1 控制芯片
选用性价比高的STC89C51RC 单片机(如图2),装有4K 可编程FLASH 存储器,具有高速、低功耗的优点。 具有稳定的脉冲信号, 能够实现对电机的控制,从而控制电机施撒肥料数量。 STC89C51RC 单片机有丰富的引脚与外部设备连接,并设有独立的ISP编程器。
图2 STC89C51RC 芯片Figure 2 STC89C51RC chip
2.2 测距模块
测距模块选用超声波传感器TELESKY US-100(如图3), 用以计算无人机距离地面的高度,传达脉冲信号。 当距离地面大于5 m 时,触发一个高电平信号,再由系统检测发出信号检测回波信号,将距离值转化成时间值,计算出与地面的高度。

图3 超声波传感器Figure 3 Ultrasonic sensor
2.3 步进电机
选用 42HS40ECL06 步进电机(如图 4)。 用以将收到的电信号转化成角位移或者线位移。步进电机无法直连在交流、直流电路中,需用专用的驱动器(10~40 V 直流电、24~36 V 驱动电)。 步进电机配合齿轮齿条控制移动面板, 通过移动面板移动带出肥料,控制另一条链条启动搅拌棒。

图4 步进电机Figure 4 Stepping motor
3 基于STC89C51RC 芯片的软件算法设计
电控系统有2 个部分运用算法。一是高光谱成像后对图像进行解混,去除不必要的噪声,利用最小噪声法分离图像噪声,再用纯净像元指数法提取高光谱曲线,通过建模、反演模型等得到可靠数据,进而得到水稻元素含量缺少量并作为数据控制信号。二是以水稻含量缺少量为信号值,启动撒肥机电源,计算投放元素缺少量 (即第一部分算法得到的水稻元素缺少值)的所需时间、投放速度和倾斜角度。当无人机高度大于5 m 时发出启动信号,再由系统检测回波信号。PWM 脉冲输出信号控制2 个电机投放, 投放结束后循环扫描新区域,如此进行若干循环,直至当前试验地内的水稻肥料投放量达标。整个算法的设计流程如图5 所示。
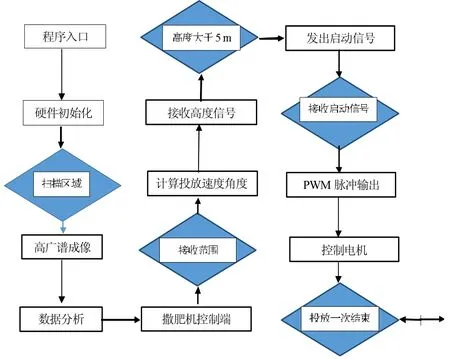
图5 算法设计流程Figure 5 Algorithm design flow
先将程序初始化,通过扫描拍摄得到数据的控制信号,无人机接收到数据控制信号后上升。 当离地面高于5 m 时, 超声传感器发波信号至STC89C51RC芯片。 STC89C51RC 单片机通过PWM 信号控制电机正转反转,利用延时函数控制时间间隔,再进行扫描。如此不断循环,直至数据信号传达结束。