基于攀爬机器人技术的电力铁塔攀爬辅助装置设计
2022-09-29贾宏儒于义亮闫可为李建红陈贵锋
贾宏儒, 马 奥, 于义亮, 闫可为, 李建红, 陈贵锋, 董 明, 王 汀
(1.国网陕西省电力有限公司 超高压公司, 西安 710075; 2.西安交通大学 电气工程学院, 西安 710049;3.国网陕西省电力公司培训中心, 西安 710032)
随着国民经济持续快速发展,电力系统已经成为支撑各行各业日常生产的重要保障,而线路故障会造成不可估量的损失。因此,确保输电线路的正常稳定运行是实现电网保证用户正常用电的重要工作。输电线路的日常巡查和维护检修是保障电力传输系统安全稳定的前提,对于安全、可靠地进行输电线路巡查和维护检修工作是电网长期以来重点的研究课题[1-5]。
目前,输电线路的运检工作仍然采用工作人员背带滑车与绝缘绳上塔的方式实现。虽然已经在塔身设计了防坠装置保障作业人员的安全性,但防坠装置并不能很好地配合工作人员的上塔工作,工作人员在上塔过程中经常会遇到防坠装置卡住的情况,需要作业人员手动调节后才能继续上塔。这一问题增加了作业人员工作的劳动强度与危险性,导致了很多作业人员不愿使用防坠装置上塔。因此,如何最大限度增加登塔作业的安全性和降低作业人员的劳动强度成为近年来电力运维部门迫切需要解决的问题[6-14]。
针对传统防坠方式的不足,攀爬辅助机器人的研究可以运用到线路防坠保护之中,弥补传统方式的不足。文献[15-21]论述了目前攀爬机器人的现状,从攀爬足的选择、机械臂的增加以及体积、重量和控制系统等方面进行了分析。目前常见的爬行轨道爬行机器人可以分为自喷涂机器人、内框螺旋式管道爬升机器人、环抱式爬行机器人、仿生爬管机器人。从目前国内外研究现状来看,针对铁塔环境的复杂性,国内外攀爬机器人主要存在以下问题:输电线路杆塔塔身是由不同规格塔材经通过螺栓固定连接而成,不同类型的塔材结构不同,攀爬足难以统一选择;因攀爬电力铁塔结构的复杂性,攀爬机器人运行动作复杂,相应结构体积重量均比较大;因为电力铁塔障碍多,环境复杂,国内外攀爬机器人前进速度较慢且无法适应工作人员攀爬习惯速度,大大影响电力检修作业的效率。
本文针对以上研究中存在的问题,利用两足往复式运动结构以及距离自动识别控制技术,设计出一款超特高压电力铁塔攀爬辅助机器人。该装置具有背带重物爬塔的功能,机器人设计上可以挂载上限为10 kg左右的重物,并在铁塔防坠落T型钢上配合作业人员的爬塔需求进行爬行,完成部分轻便电力工器具在铁塔上下部之间的运输,分担了登高人员的负载重量,减轻了作业人员的劳动强度,增加工作的安全稳定性。
1 机器人的机械传动结构
为简化传动结构,在保证工作可靠性的前提下尽量减轻项目产品的重量和减小体积,攀爬辅助机器人用了3个独立的机械机构分别进行两足松开/夹紧控制及机身伸长/缩短控制。重点基于实现结构、推力强劲、高度可靠考虑,3组传动机构均采用螺杆、螺母传动副。
1.1 传动机构的尺寸设计计算
传动机构的设计步骤如下:
1)垂直方向的伸缩机构采用螺杆螺母传动机构。
2)本文中螺杆螺母的螺纹选用传动效率较高的梯形螺纹,该结构具有自锁能力,在电机失控的情况下可以自动锁死,保证了机器本身不会在铁塔攀爬中掉落,极大提高了装置的安全性。
3)传动机构的螺杆选用的材料为耐磨性及尺寸稳定性较好的合金工具钢9Mn2V,螺母外套选用铸铁打造,螺母内部材料为铜,增加耐磨性。
4)传动机构的各参数的取值计算公式如下。
螺纹中径d为
(1)
式中:F为轴向载荷;Ψ取值2;[p]为许用比压,取值1.5。
螺纹升角λ为
(2)
式中:P为螺距;x为线数;Px为导程。
本文中轴向载荷值取1 000 N,螺距取4 mm,故螺纹中径d取值16 mm,螺纹升角λ为4°33’;螺母高度H取36 mm,旋合圈数x取值9,基本牙型高度H1取2 mm。
1.2 电动机参数的设计
根据本文设计机械传动系统的特性,要求电动机在工作中需进行频繁地进行起动、制动和反转等操作。因此,选用了转速范围大、可无级调节的直流伺服电机。此外,直流伺服电机还很容易获得低速,在起停、微升阶段有制动功能,配合螺杆的自锁特性,极大提高了设备的安全性。
电动机整体的机械传动效率η的计算公式为
η=η1η2η3
(3)
式中:η1为螺杆的传动效率;η2为滚子轴承的传动效率;η3为联轴器的传动效率。所以电动机所需工作功率p为
(4)
式中:F为传动机构在垂直方向的力;v为螺母轴向移动速度。电动机的转速n为
(5)
通过计算,本文最终确定电动机的工作功率为256 W,转速设定为8.36 r/min。
1.3 机械传动机构的具体实现
根据以上关于螺杆/螺母传动机构的推导计算,设计出的机械传动机构如图1所示。

图1 机械传动机构
传动机构采用电动夹紧和松开方式与两足往复式运动结构,两足交替往复完成机器人以电力铁塔防坠落T型钢为导轨进行垂直攀爬。采用3个独立的防坠闭锁装置,形成多重防坠保护。
本文对防坠落器进行了优化改进,设计开发了一种新型的锲型自锁器用于设备攀爬系统,取代原来常用的偏心凸轮和卡爪式自锁器。其主要结构由制动机构、传动机构和驱动机构组成,如图2所示。

图2 新型锲型自锁器
2 距离的自动识别控制
为保证机器人方便于现场实际工作,在辅助攀爬时始终与作业人员保持一定的安全距离,选用两个UWB(Ultra Wide Band)无线载波通信模块+机身控制器对机器人与攀爬作业人员间距离进行自动识别控制。
2.1 UWB的距离识别
UWB的距离计算方法利用了双向飞行时间(two way-time of flight,TW-TOF)法,如图3所示。

图3 UWB的测距原理
辅助机器人上搭载的模块A以及作业人员身上搭载的模块B根据双向飞行时间法,在启动阶段模块A会产生一条独立的时间戳Ta1,模块A在其时间戳Ta1发射一束脉冲信号,被模块B在自己的时间戳Ta2时刻接收;同时,模块B在时间戳Tb1时刻发射另一束脉冲信号,被模块A在Tb2时刻接收。通过这4个时间戳,利用式(6)可以确定飞行距离S,即
S=C[(Ta2-Ta1)-(Tb2-Tb1)]
(6)
式中:C表示光速,其值为3×108m/s。
用于攀爬辅助机器人的UWB测距系统包括放置于登塔作业人员衣兜里的活动标签(能够发射UWB信号来确定位置),以及安装于攀爬辅助机器人机身上的UWB基站(能够接收并估算从标签发送过来的信号)。
2.2 距离的自动控制
在获取到距离信息后,为确保机器人在辅助攀爬时始终与作业人员保持一定的安全距离,设计了一套距离自动控制程序来实现这一功能。该程序分为自检与挂装模块、爬行模块,如图4所示。
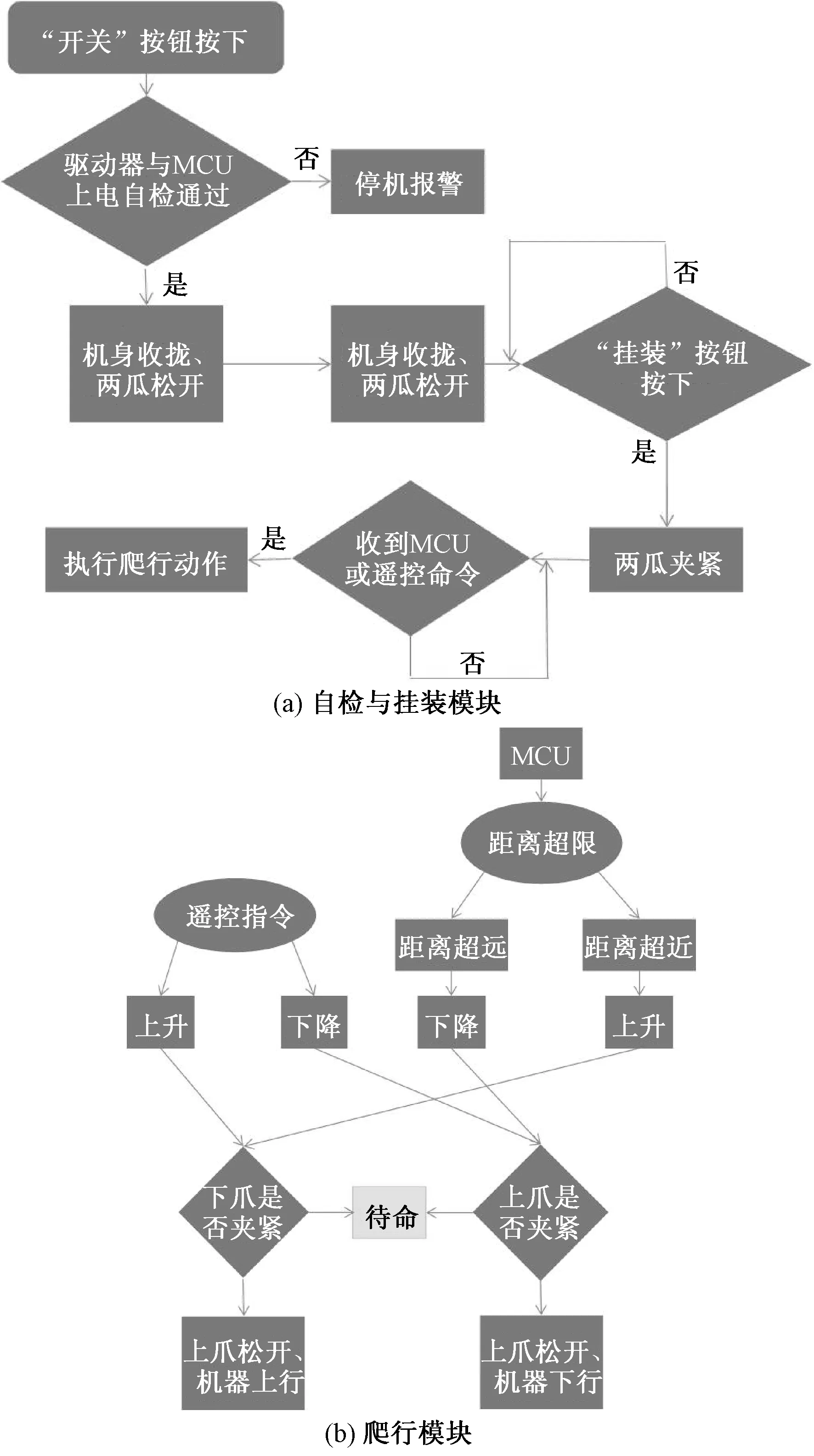
图4 距离自动控制程序流程
通过图4中的距离自动控制,实现了机器人在辅助攀爬时与作业人员的距离控制,时刻保持机器人在作业人员上方跟随式的辅助攀爬。同时,通过程序设计,完成了机器人两个攀爬脚的相互锁紧配合,保障了机器人不会存在掉落的风险。
3 现场测试
为验证辅助攀爬机器人的现场应用性能,在某750 kV输电线路杆塔从攀爬、负重、防坠功能3方面开展2次现场测试,如图5所示。

图5 辅助攀爬机器人现场测试
现场对辅助机器人的攀爬、防坠、负重功能的测试结果见表1。

表1 辅助机器人的测试结果
测试结果表明,攀爬辅助机器人的运动控制系统能实现机器人在电力铁塔防坠落T型钢上垂直攀爬前进,行走速度可在0~0.3 m/s范围内分多档可调。同时,攀爬辅助机器人具有不低于10 kg的负重攀爬能力以及100 kg以上的防坠保护功能。攀爬辅助机器人的距离自动控制系统在工作过程中能自动识别机器人与作业人员高度距离,并实现自动跟踪,始终让攀爬辅助机器人始终位于电力作业人员上方2~5 m距离爬行。
4 结论
本文研制了超特高压电力铁塔攀爬辅助机器人,实现了在铁塔T型防坠轨道上的直线攀爬,能够进行攀爬人员防坠落保护和运送小物,装置体积小、重量轻,运输安装方便,工作稳定可靠。本装置的核心技术包括以下3点:
1)传动机构采用电动夹紧和松开方式与两足往复式运动结构,两足交替往复完成机器人以电力铁塔防坠落T型钢为导轨进行直线攀爬,行走速度可在0~0.3 m/s范围内分多档可调。同时,攀爬辅助机器人具有不低于10 kg的负重攀爬能力以及100 kg以上的防坠保护功能。
2)采用UWB无线载波通信模块+机身控制器对机器人与攀爬作业人员间距离进行自动识别控制,始终让攀爬辅助机器人位于电力作业人员上方2~5 m距离爬行。
3)采用3个独立的防坠闭锁装置,形成多重防坠保护,在传统防坠模块的基础上提升了机器人的安全保护能力。
