基于buck 变换器调制的盘式无铁心无刷直流电机矢量控制研究*
2022-09-28沈亚莉刘思豪
沈亚莉 刘思豪
(上海电机学院电气工程学院 上海 201306)
1 引言
盘式无铁心无刷直流电机(Disc Coreless Brushless DC Motor,DCBLDCM)属于轴向磁场电机,轴向磁场电机结构紧凑、效率高、功率密度大,适用于转矩密度大和空间小的场合。由于无铁心结构的电机定子无齿槽,电枢电感小,使DCBLDCM 在运行和控制性能上与传统电机有很大的不同,无刷直流电机的转矩波动大,限制了其在高精度应用的发展。
造成无刷直流电机转矩脉动的原因有很多,抑制转矩脉动是无刷电机控制研究的热点之一。DCBLDCM 使用了无铁心结构,具有定子绕组电感极小的特点,有益于抑制换相转矩脉动。近年来,国内外学者对转矩脉动产生的原因,提出各种抑制方法。早在1989 年PillayP 和KrishnanR 就首次提出电机换向转矩的问题,并分析了换相转矩脉动的原因[1];2001年kelly等将电流预测控制运用到控制系统中,降低了电机的转矩脉动,但是效果不太明显[2];2013年天津大学的王晓远等,考虑到DCBLDCM 小电感的问题,用Buck 斩波电路代替PWM 调制,缩短了换相时间,减小了转矩脉动[3];2014年他们在电机外部串联了电感,增加电机的绕组电感,抑制PWM 调制转矩脉动,但是在中、高速运行时,是否串入电感对控制系统特性的影响不大[4];2016年他们提出在三相逆变桥前加入电流型斩波电路,有效地减小了电机定子电感小引起的转矩脉动,但是控制算法比较复杂[5]。
总而言之,盘式无铁心无刷直流电机具备了无刷直流电机和轴向磁场电机的优点[5],其转矩脉动产生的原因更为复杂。虽然国内外学者对转矩脉动做了大量研究,但都有其局限性。针对上述问题,将传统的矢量控制引入到DCBLDCM 控制系统中,同时又考虑其电感小的特点,电流对电压反应迅速,在三相逆变桥前加入buck 斩波电路,有效地降低了电机的转矩脉动。
2 盘式无铁心无刷直流电机数学模型
无刷直流电机电枢绕组星形连接,采用三相电压型逆变电路供电。定子为无铁心结构,在此基础上,进行了以下简化。
1)忽略电枢反应,忽略齿槽效应。
2)在驱动电路中,将功率管和续流二级管视为理想状态。
3)假设三相绕组理想对称,磁阻忽略不计,定子各绕组间互感视为常数,且各个绕组互感相等。
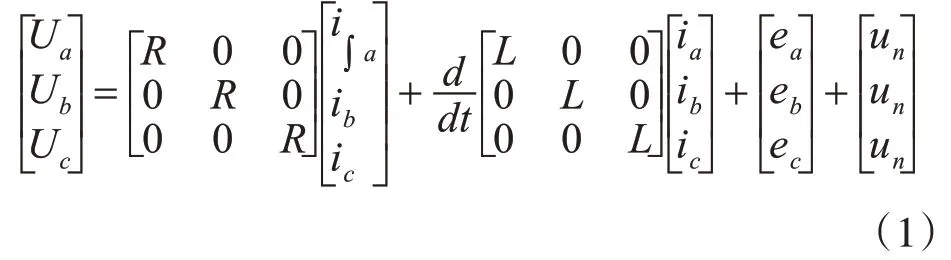
根据以上假设条件,电压平衡方程为[6]
基于ABC三相静止坐标系的转矩方程为

基于d-q坐标系的转矩方程为

取id=0,从而转矩方程为

3 矢量控制原理
矢量控制的基本原理[7]如图1所示。

图1 DCBLDCM矢量控制系统框图
其实现步骤如下:
1)通过Clarke 变换,将三相静止坐标变换到两相静止坐标系中,再通过Park变换将两相静止坐标系变换成两相旋转坐标系,此时电流矢量被分解为两个相互垂直、相互独立的直流分量id和iq,然后分别控制id和iq。
2)该模型采用的是电流、速度双闭环的控制方式[8~9],矢量控制系统的内环为电流环,外环为速度环,使控制精度更精确。速度环和电流环采用PI控制器控制,通过控制id来控制磁通,控制iq来控制转矩,速度控制器给出iq调节参考量,经电流环调节后获得电压分量ud、uq。
3)电压分量ud和uq经过Park逆变换。
4)根据SVPWM 空间矢量合成方法,实现矢量控制输出,达到矢量控制的目的[10]。
4 buck变换器的控制分析
4.1 buck变换器原理
直流斩波电路主要主要目的是将直流电源从恒压转换为可调电压[11]。本文在三相逆变桥前增加了一个buck斩波电路,其拓扑结构如图2所示。

图2 buck变换器原理图
在控制开关VT 开通时,电压E 通过电感L 向负载R 供电,同时电感L 的储能也增加,在控制开关VT 关断时,二极管VD 续流,电感L 向负载R 供电,流过电感的电流线性减小。
负载电压的平均值为

式中:ton为VT 导通的时间,toff为VT 关断的时间,T为开关周期,α为导通比。
4.2 采用buck变换器的电机控制系统
buck 变换器可以调节电压并进行功率因数的校正,而三相逆变器则不再对绕组端电压进行调制,而是对电流进行调节并参与换相[11~14]。
考虑到DCBLDCM 电感小的特点,加入buck电路,同时也间接增加了电路中的电感值,有效地减小了电机的转矩脉动[15]。
5 仿真分析
本文采用id=0 的矢量控制策略,盘式无铁心无刷直流电机的电感值大约只相当于有铁心电机的1/7-1/10 。使用控制系统仿真软件Matlab/Simulink 搭建了基于buck 变换器调制的盘式无铁心无刷直流电机矢量控制仿真模型,进行实验研究。
仿真条件设置为:参考速度n=1000r/min,初始时刻负载转矩为0,在t=0.2s 时,负载转矩TL=0.2N·m,未加入buck 变换器的仿真结果如图4 所示。本文采用三个PI 控制器,分别调节转速、电流id和电流iq三个控制量,实现了对DCBLDCM的双闭环控制。由图3 可看出,当DCBLDCM 从n=0 上升到n=1000r/min 时,电机具有较快的动态响应,在t=0.2s 时突然加入负载转矩TL=0.2N·m,电机电磁转矩增加,但是由于电机电感小,突加负载转矩前后,电磁转矩存在严重的转矩脉动。

图3 矢量控制下电磁转矩Te的变化曲线

图4 加入buck变换器后矢量控制下电磁转矩Te的变化曲线
在相同条件下的矢量控制系统中加入buck变换器,仿真结果如图4所示,从图中可以看出,加入buck变换器后,就相当于间接增加了电路中的电感,有效地减小了突加负载转矩前后电磁转矩脉动。
6 结语
本文针对盘式无铁心无刷直流电机电枢电感小的问题,提出一种用于DCBLDCM 的控制方式,采用传统的矢量控制的思想,在Matlab/Simulink 环境下建立了DCBLDCM 矢量控制系统的仿真模型,同时考虑到无铁心电机电感小的特点,提出在三相逆变器前端加入buck 变换器,间接增加了电路中的电感值。并对本文所提出的策略,分别进行了仿真试验,通过对仿真结果的观察和比较可以看出,在矢量控制系统中加入buck 变换器能有效减小电磁转矩脉动,对今后的电机控制有一定的参考价值,但是电路中各种因素引起的电磁转矩脉动仍然存在,因此,后期还需要结合其他控制方法进一步研究。
