基于中观模型的进入行人流仿真研究
2022-09-28孙悦朋郭仁拥杨海东
孙悦朋,郭仁拥,于 涛,杨海东
(1. 内蒙古大学计算机学院,内蒙古呼和浩特 010021;2. 北京航空航天大学经济管理学院,北京 100191)
1 引言
在城市生活中,各类车站、商场大厅、广场集会活动等都会产生人群聚集的现象,大量行人在公共场所的快速聚集是造成人群踩踏、拥挤等事故的主要原因。行人聚集,也称行人集结,一般是由临时参加活动的人群组成,并没有完整的群体结构,如有特定目的的人群聚集会有一定的人群结构,但生活中大多还是由普通居民行人产生的聚集。行人的疏散过程仿真已被众多学者研究,如刘一等[1]基于势能场建立仿真模型对机场变截面通道行人流进行仿真。然而,行人进入活动场所的过程或称行人流入过程作为行人聚集的一方面也不可忽视,同样存在安全隐患和空间效用问题。传统的控制进入活动场所人数的做法有两个缺点,第一,行人进入活动场所的过程中,存在行人相互拥挤和排斥;行人在进入活动场所后不能合理分布,局部行人密度会超过临界值,产生局部拥堵,造成局部挤压踩踏事故。第二、控制进入人数做法容易使得场所中一些设施不能得到充分的、合理的利用。通过模型仿真分析,研究行人进入活动场所的移动动态,了解行人聚集的效率、空间分布现象,对降低事故发生几率、提高聚集效率,帮助管理者制定合理的行人进入流管理控制策略等具有非常重要的意义。
目前,进入行人流研究方法主要分为模型仿真、行人实验和机器学习三类。模型研究中,最具代表性的是Reynolds[2]受自然界鸟群和鱼群的聚集行为影响而提出的Boid模型,模型基于群体分离性、排列行以及内聚性等基本运动规则提出;Vicsek[3]等根据Boid模型,用数学方式表示排列性和内聚性,构造出数学仿真模型。以上模型是根据自然界启发提出的,但是并不适用于刻画人类聚集。张子龙[4]利用社会力模型引用聚集点矢量来进行人群聚集仿真。Wang[5]等学者引入视觉域的概念提出了基于Agent的CityFlow-U模型,通过对步行购物街和商场的人群聚集进行仿真和分析,不仅较好地实现了人群聚集效果,而且研究出参数调节对行人轨迹的影响,对于指导步行街或商场内设施摆放等具有实际意义。常钦等[6]基于网格Agent构建元胞自动机模型,利用目标吸引力权重对行人决策和避障行为进行行人分配。这些模型大多是基于一个聚集点或聚集区域来仿真,仿真结果刻画了行人在聚集点或聚集区域的聚集现象,较少关注一些闭区域活动场所进入行人流,不能直接用来刻画进入场所人群的移动过程及行人在活动场所内的分布。对于人群聚集的分析研究,还有利用聚类、神经网络等方法进行分析。于泉等[7]提出行人群集概念,并利用K均值聚类对信号交叉口行人聚集进行分类。Nakamoto等[8]利用神经网络学习群体中个体规则来实现Boid模型呈现出来的现象。机器学习方法对行人数据来说一是处理困难,二是有的方法存在不适用性,而且研究的行人聚集也多是基于聚集点(区域)或是聚集状态下的群体移动,很少关注进入行人流。
行人聚集方面的研究总体较少。现有大部分有关聚集的研究主要使用微观模型。微观模型的灵感多来自于自然界的生物特征研究,更加注重个体间的相互关系。微观模型的特点是可以精确到单个行人进行微观交通行为分析,但是计算效率低,且适用于中小型人群规模,而宏观行人模型简化行人对场景的相互关系。对于行人聚集的研究,不仅要注重行人间及行人与外界事物间的相互关系,同时要在宏观角度上观察行人群体性聚集过程中的特点及规律。
本文采取中观模型的方法,中观模型既可以观察宏观方面的现象也可以观察较为微观的现象。而且在室内、广场等人群数量较多的聚集区域,中观模型其实更符合人群流动的研究。因此,本文第二节引入元胞自动机的转移概率作为元胞之间行人传输的分配比例,使用二次函数计算静态场值作为行人的驱动,扩展了Guo等[9]中观模型,用以研究行人进入活动场所的动态演化过程和行人分布。第三节展示了模型的仿真结果,并详细分析了多个行人聚集影响参数如静态场值参数、动态场值参数、墙壁势参数等敏感参数在行人聚集过程中对行人聚集效率的影响。本研究可以帮助人群管理者以及场所建造者预先对场所内的行人分布进行仿真,优化场所的安全空间设计,在能够有效聚集的前提下,制定更合理的安全设计策略以保障行人在进入活动场所的安全,并有效提高行人移动效率、移动安全性和空间利用率。本模型有很强的扩展性,可以单独描述行人聚集过程,也可以描述场景内同时发生行人聚集和疏散的过程,为后续更复杂的行人活动场景提供了一种有效的模型方法。
2 模型描述
元胞传输模型,最早是由Daganzo(1994,1995)[10,11]提出的,用以模拟分析基于一维的道路车辆行驶过程及多路段车辆动态行驶过程的相互影响。以静态场和动态场驱动行人的元胞自动机模型已经成为研究行人疏散的主要微观模型,特别是以Huang等[12]为代表的利用势能场来驱动行人移动,实现行人的路径选择与行人分配。本模型引入元胞自动机的行人移动概率思想,扩展Guo[9]等提出的行人元胞传输模型,另外考虑墙壁排斥势能以及目标元胞剩余容纳能力两个因素。下面介绍本文所提出的进入行人流元胞传输模型。

图1 元胞局部图及行人行走方向
行人元胞传输模型基于正六边形元胞划分场景空间,局部元胞空间如图1所示,每个元胞允许容纳若干人,每个元胞有六个邻居元胞,即行人有六个行走方向,元胞的六个边可以通过行人。元胞的最大容纳人数N以及元胞边的最大通过人数Q,将在第三节的仿真中设定。
1)行人分配比例。Guo[9]等提出的元胞传输模型中,定义势能场驱动行人流传输,势能场反映的是行人与目标距离以及前方的拥堵程度。势能计算属于线性计算,对进入行人流不适用。由于元胞中存在若干行人,在下一个时间t+1时,元胞中若干行人将移动到下一个元胞,这里面存在行人相互作用,使得元胞中的若干行人并不是集体走向一个邻居元胞,而是有可能向不同的邻居元胞分散流出,所以还涉及行人分流比例问题。Guo[9]等的元胞传输模型中行人从势能高的元胞走向势能低的元胞,分流比例是通过上下游元胞的势能差以及下游元胞的剩余容纳能力计算的。而本模型引入元胞自动机模型中的转移概率,行人在移动过程中除了受静态场值驱动外,还会受到动态场值驱动、行人与墙壁的相互作用以及行人之间相互作用的影响,因此,本模型中行人移动到邻居元胞的行人分配比例为

(1)

Sij为每个元胞的静态场值,受等高线计算的启发,采用一个二元二次函数来计算静态场值

(2)
λ1和λ2为特征值,影响静态场值的结果,静态场值大小与增长的快慢随特征值的调节而变化。静态场值是行人与墙壁之间的距离的体现,反应了行人进入房间内倾向于靠近墙壁移动的行为,其中kS为其敏感性参数,如图3,行人从静态场值低的地方走向静态场值高的地方。
Dij为动态场值,表示为

(3)
这里nij(t)表示t时刻第(i,j)个元胞内的行人数量,Nij表示t时刻,第(i,j)个元胞的最大容纳行人数量。因此Dij是随时间变化的,行人数量每更新一次,Dij也更新计算一次,式(2)中的kD为动态场值敏感性参数。动态场值同样作为行人的驱动,反映了行人的绕路行为,如果当前元胞的行人要往其六个邻居元胞移动,若某个邻居元胞产生拥堵,则会绕开此邻居元胞并前往其它邻居元胞。
Wij表示行人与墙壁产生排斥而产生的势能值,kW为其敏感性参数。行人进入室内,虽然墙壁对行人有一定的吸引力,行人倾向于靠近墙壁停留来获得安全感,但是墙壁毕竟是不可逾越的障碍,行人在聚集过程中要考虑疏散因素,进入活动场所的行人如果一进入活动场所就大量拥挤在贴近墙壁处,不仅不符合实际,而且容易产生安全隐患,局部密度的急剧上升足以推倒一面墙。因此,行人适当保持与墙壁的排斥力是必要的,这里墙壁势能值计算法采用Nishinari等[13]学者的基于行人与墙壁距离的计算方法:
Wij=min{Dmax,d}
(4)
Dmax表示行人视野最大距离,d表示元胞的圆心到三面墙垂直距离的最小值,距离计算利用欧式距离计算的。
另外
2)理论流出人数。令Fij(t)为在t时刻,行人从当前元胞移动到其邻居元胞(i,j)的理论人数。Guo[9]等的模型中,行人向着既定目标移动,而本文模型中,进入的行人没有既定的聚集点,行人之间的交互以及行人与墙壁的相互作用是行人进入活动场所的主要影响因素。所以,行人会产生如图1所示的行走方向,当前元胞的六条边是与其六个邻居元胞的公用的公共边,因此Fij(t)具体为

(5)
3)实际流出人数。令Yij(t)为人从当前元胞移动到其邻居元胞(i,j)的实际人数。当来自不同邻居元胞的行人同时涌入当前元胞时,会产生行人冲突,导致一部分行人在当前元胞保持不动,放弃进入邻居元胞,这一点Guo[9]等模型没有考虑。因此,用kY表示元胞剩余容纳能力的系数,所以Yij(t)为

(6)
4)人数更新。当行人在t+1时,行人按照上述规则从当前元胞行走到邻居元胞(i,j),而元胞(i,j)的行人数目由其邻居元胞进来的行人和其流出的行人数目共同决定

(7)
Aij表示流入元胞(i,j)行人的邻居元胞的集合,Rij表示元胞(i,j)流出到目标邻居元胞的集合。
3 实验结果与分析
3.1 数值仿真
本文设置的仿真场景如图2所示,房间内被划分为19×11+20×10个六边形元胞,元胞边长为1。Ezaki等人[14]研究进入流和入口位置,指出入口位置位于房间的中间处,行人进入效率更高,因此本仿真场景中入口设置为房间的中间位置(如图2)。Liu等人[15]通过进入行人流情景实验,发现进入规则对行人在室内的分布影响较小,考虑到入口元胞的容纳能力,设入口元胞为e,入口元胞e的最大容纳行人数量为Ne,每个时刻的行人数量为ne,则行人进入到入口元胞的数量为Ne-ne。

图2 仿真场景离散化
房间被划分为19×11+20×10个六边形元胞,入口只有一个。
Ezaki[14]与Liu[15]等人的研究结果表明,行人进入活动场所比如房间、电梯等后,希望在活动场所内寻找一个地方来保持稳定,这一过程包括决策、移动和方向变化,其中最重要的一个特点是行人在进入活动场所到稳定下来的过程中,行人倾向于沿着远离入口的边界聚集,因为当行人站在边界附近时,与其他人的排斥力较小,但是聚集过程中也考虑疏散因素,墙壁或障碍是对行人的疏散和聚集过程均有影响,所以行人与墙壁或障碍会保持一定的距离。由此可知,行人流模型不仅要从定性上仿真来展现行人的移动现象,而且作为衡量行人流模型的方法,基本图中的流量-密度图形状也是行人流模型定量刻画的目标。

图3 静态场值示意图,最低处为入口

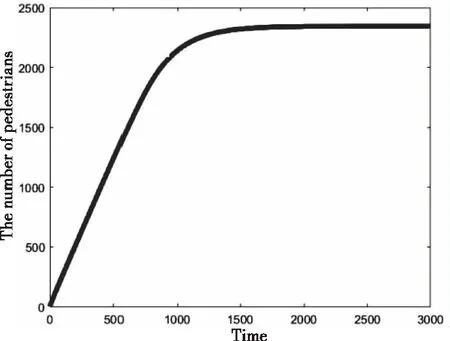
图4 行人数量与时间变化图
由图5的行人移动伪彩图可见行人的移动趋势。行人起初从入口进入室内,会在入口产生轻微的拥堵并形成拱形,随后在墙壁的一定的吸引下,向房间的两侧移动,在500s—700s时间段,逐渐向房间的东北方和西北方的角落开始聚集,并与入口北方的区域形成倒着的“U”型,也可称作拱门型。表明行人在房间没有装满行人的条件下,行人受到边界一定的吸引,倾向于向房间的两侧即边界和角落聚集以获得安全感,这与Liu等[15]的实验结果相似。随着时间的推移,房间内行人越来越多,行人没有办法自己选择合适的位置,只能妥协,使得新进入房间的行人逐渐充满整个房间并达到最后的稳定状态。行人达到稳定状态的平均流量-密度图如图6所示,在仿真中设置的每个元胞最大容纳行人数量N=6人是在保证行人进入活动场所后,行人密度处于一个相对宽松的状态,但为了更好地观察流量-密度图,还绘制出了在N=16人(其它参数不变)时的流量密度图,并与Weidmann[16]、Hankin[17]等得到的流量-密度图进行对比,本仿真结果得到的流量-密度图还是较为符合一般行人流的流量-密度图的“Λ”型。


图5 不同时刻的行人数量比例伪彩图。

图6 流量密度图比较注:Model(N=6)与Model(N=16)为模型得到的,其余为Weidmann与Hankin等得到的
3.2 参数变化对行人移动的影响
选择t=500s时,来观察kS、kD、kW这三个参数对行人移动的影响,图7是基于图5的仿真结果参数,在其它参数一定的情况下分别观察三个参数的变化对行人移动和分布的影响。图7的(a)~(c)中kS取值分别为kS=0.5,kS=1.2,kS=1.5,随着kS的增大,靠近北面墙聚集的行人逐渐减少,行人逐渐向东西两侧移动,这时边界对行人产生的吸引比较突出。图7(d)~(f)的kD取值分别为kD=0.5,kD=1.2,kD=1.5。随kD的逐渐增大,行人进入房间内人数越来越多,反应了行人的跟随。kD变小表示面对人数较多的元胞,行人希望绕开或者停留在原地。图7(g)~(i)的kW取值为kW=0.1,kW=0.2,kW=0.5。kW的增大则影响行人与墙壁的间距,kW不仅可以控制行人与墙壁的距离,同时如果有障碍的情况下帮助行人避开障碍物,可以为后续的在有障碍物的情况下进入行人流的研究提供参考。

图7 kS,kD,kW对行人移动影响伪彩图
每个参数变化的仿真过程中,其它参数同图5的仿真参数。
3.3 人数减少对行人移动的影响
上述仿真过程行人数量较大,下面选择行人数量只有500人来观察进入行人流,仿真场景同前文所述。图8为行人达到稳定状态的伪彩图,其中(a)的参数同图5中的参数,此时以图2中的L4线上部分的六边形元胞的两条边计算行人流量,得到(a)中的流量-密度图,并与Predtechenskii[18]等得到的流量密度图进行比较,模型的得到的流量-密度图形状与Predtechenskii[18]等相似。伪彩图上看行人聚集在北面墙和东北、西北两个角落里,东西两侧墙壁人数极少;(b)中各参数值为kS=0.1,kD=0.8,kW=0.008,kY=0.8,Dmax=20,λ1=0.06,λ2=0.04。kS,kD,kW,Dmax参数值发生变化,由于行人只有500人,所以行人看到北面墙的视野距离变长,行人可以尽早判断前方情况,这时λ1,λ2不变;(c)中各参数取值为kS=0.2,kD=0.9,kW=0.08,kY=0.8,Dmax=10,而λ1,λ2值发生变化λ1=0.1,λ2=0.025。可以看出(a)中行人是聚集的分层状态,(b)和(c)行人虽然大部分行人聚集位置同(a)类似,但是还有一些行人聚集在东西两侧墙壁,而且(b)和(c)在两组不同参数下产生结果类似,这表明不仅kS,kD,kW,Dmax这些参数影响行人的分布,λ1,λ2这两个参数决定的静态场值同样影响行人的分布。从行人数量和时间关系上来看,(a)和(c)都在200s时达到稳定状态,而(b)达到稳定状态时比(a)和(c)稍晚一点,表明参数的变化影响进入行人流的效率。
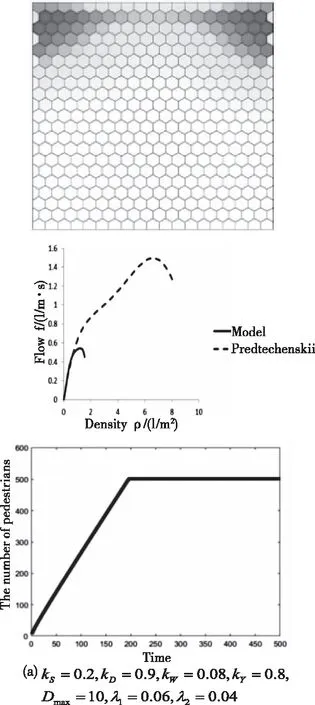
中图为流量-密度图,蓝色线(本文的)红色线(Predtechenskii)

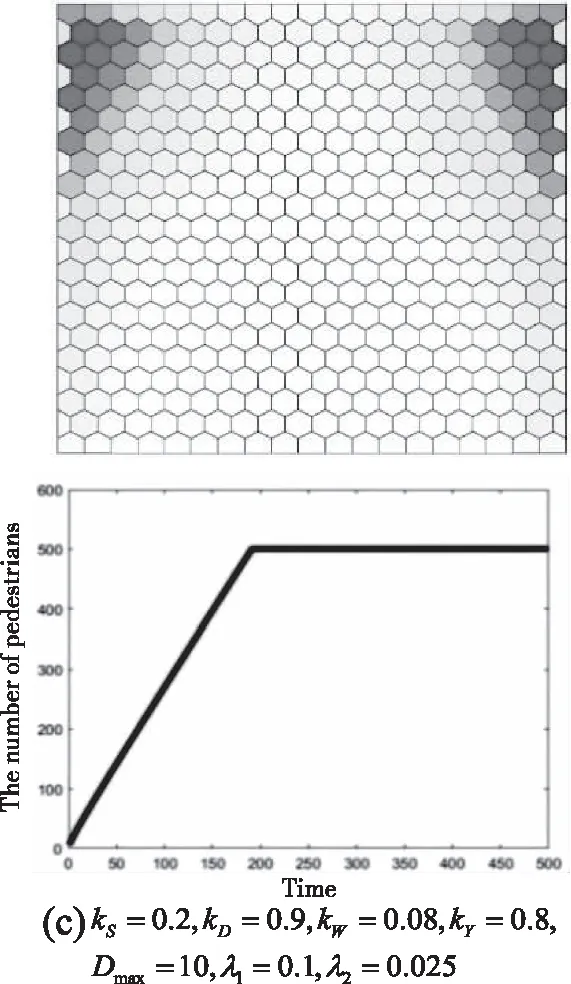
图8 不同参数下的500ped行人进入流稳定状态
3.2 实验比对
由于进入行人流的场景实验特别少,本文选取Liu等[15]的场景实验中的实验2进行实验比对。Liu等[15]实验场景为4m×4m的正方形室内场景,如图9所示,仿真场景设置为由4×3+5×2个六边形元胞组成的室内空间,元胞边长为0.6m,元胞最大容纳人数N=3人,元胞每条边最大通过人数为Q=1人。仿真结果如图10所示,其中(a)~(c)为场景实验行人达到稳定状态的快照实景图,(d)~(f)为本仿真行人达到稳定状态的伪彩图。仿真的参数配置为kS=0.2,kD=0.9,kY=1,λ1=1,λ2=3,Dmax=4,而kW对应于(d)kW=0.08,(e)kW=0.07,(f)kW=0.06。由图10看出行人达到稳定状态下,随着人数增多,行人进入房间内仍倾向于靠近墙壁,不会在靠近入口处产生拥挤,且形成分层的近似拱门的分布现象。模型仿真结果的行人空间分布接近场景实验下的行人分布结果,说明模型通过调节各参数值,可以大致再现进入行人流的行人分布现象。但是仿真结果与场景实验仍存在差异。这是由以下两个主要原因导致:①场景实验设置为第一个行人进入室内空间选择一个地方停止,下一个人才能从入口进入,而本模型属于中观模型,设置每个时间步只允许进入一个人。②中观模型是把元胞内若干行人看作一个整体,与实际场景实验存在计算偏差。以上两个问题需要后续改进。
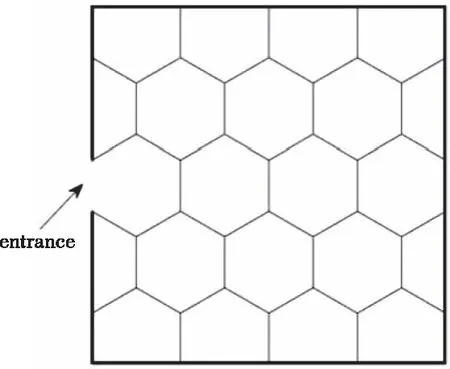
图9 仿真场景设置

图10 行人稳定状态对比
4 结论
本文扩展了Guo[9]等元胞传输模型,可以描述行人进入流的动态过程,预测行人在进入活动场所内达到稳定状态后的分布。提出的模型与Guo[9]等模型有以下区别:1)元胞自动机的转移概率作为元胞间行人传输的分配比例。使其具有较强的扩展性。2)静态场值作为行人的驱动,本文使用二元二次函数来计算场值,与Guo[9]等传统线性势能计算不同。目前大多数行人模型关注行人疏散,几乎很少关注行人进入流,因此提出的模型及其研究较新颖。本文提出的进入行人流的聚集模型,既描述了行人进入活动场所的动态过程,也能够有效预测场景中到达稳定聚集状态后的分布规律,模型的仿真结果可以显示:行人进入活动场所内倾向于靠近室内墙壁来获得安全感;行人进入室内后并不长时间拥堵在入口附近,而是向室内两侧散开;人数增多时,行人进入活动场所并达到稳定状态下会形成分层的、近似拱门的现象等,与实际的进入流行人实验所产生的现象较为符合。因此该模型可以帮助常见聚集场所进行合理的场景设计及安全性分析,提前预测场景中聚集分布情况,帮助行人安全管理、聚集标识牌的设置,如虽然墙壁对行人具有一定的吸引力,但是大量行人若进入活动场所沿墙壁扩散或出现局部行人密度过大都会造成局部拥堵,可以设置导向标识或语音提示引导行人流向空间空闲部分移动,有效提高行人移动效率、移动安全性和空间利用率等,甚至对大规模行人聚集的安全预警措施都有很实际的指导意义。
作为行人系统规划、设计、管理和优化的重要实验工具[19],后期模型仿真研究可考虑以下因素:①行人进入活动场所的多入口、场所内的障碍等均影响行人进入过程,同时考虑行人集结过程也要考虑行人疏散过程,如电梯突降事故或地震时,行人靠近墙壁反而会增加安全性。②仿真并分析行人进入和疏散(出去)同时进行的情况。③行人进入活动场所过程中的心态变化以及信息传播等因素都将影响行人的移动。因此上述因素对行人的影响是后期研究的目标。