基于距离和属性加权的FWKNN室内定位方法
2022-09-28朱正伟诸燕平
缪 颖,朱正伟,诸燕平
(常州大学微电子与控制工程学院,江苏 常州 213164)
1 引言
室内定位这一技术一直以来都是基于位置服务的研究热点,并且在快速发展着,由于在室内或荫蔽处无法接收到卫星信号,所以GPS和北斗等卫星导航定位系统无法在室内使用[1]。为了实现“最后一公里”的精确导航,各种室内定位技术成为近年来大量科研工作者的研究热点[2]。
按照传输信号不同,室内定位技术可以分为基于WiFi、RFID、ZigBee、蓝牙、超宽带、红外线、磁场、超声波、伪卫星等多种定位方式[3]。其中基于WiFi的定位技术由于WiFi硬件的普及而受到重视[4]。在基于WiFi技术的室内定位中,K近邻(K-nearest neighbor,KNN)凭借其算法简单且易于实现的优势而得到广泛的研究,早在2000年的时候,微软就开始进行WiFi指纹室内定位的研究工作,并将KNN方法首次运用到室内定位中。
微软研究院的Bahl等人[5]提出使用KNN方法进行指纹定位,将待测指纹与指纹库进行匹配得到K个最相似的指纹实现定位。基于KNN算法,香港科技大学的Lionel 、Liu 、Lau等人[6]提出了加权K近邻法(weighted K-nearest neighbors,WKNN),按照待测指纹和离线数据库在信号空间上的欧氏距离分配权重,定位精度得到了提升。韩国世宗大学的Beomju等人[7]提出了改进加权EWKNN算法,通过改变K值来提高指纹识别的准确性,同样改善了定位效果。北京航空航天大学的牛建伟[8]等人提出了属性加权KNN算法,将无线接入点(access point,AP)之间的相关性运用到权重调配中,得到较好的定位成果。中国矿业大学的毕学京[9]等人提出了高斯函数定权的GWKNN室内定位方法,这种方法有效改善了定位精度。文献[10]基于K近邻算法提出了一种监督特征选择方法,结合了距离加权和属性加权的优点进行特征选择,具有较好的预测性能,本文借鉴了该论文利用最近邻的最相关属性确定目标变量的思想,提出了基于距离和属性加权的室内定位方法FWKNN。利用主特征RSS的权重计算加权距离,由该距离取代传统的欧式距离,对K个最近邻加权距离分配权重,在此基础上利用卡尔曼滤波精确定位结果,有效提高了定位精度。
2 KNN室内定位
2.1 基于RSS的WiFi指纹定位技术
WiFi指纹定位算法分为离线采样和在线定位两个阶段。在离线阶段,按网格点采集对应RSS值,构建离线指纹数据库。在在线阶段,实时获取当前RSS值,运用某种定位算法,通过与离线数据库进行匹配来定位,如图1所示。

图1 基于RSS WiFi指纹定位技术原理
2.2 KNN室内定位
KNN室内定位算法是将在线测试点处的RSS值与离线数据库中的RSS值进行匹配,先计算测试点和参考点的RSS距离,然后选取K个最小距离,以及其对应的参考点,最后对其坐标取均值由此得出在线测试点的估计位置。
在离线阶段要完成离线数据库的构建,将定位区域分为n个网格点,第i个网格点由坐标Li(xi,yi)表示,i=1,2,…,n,假设该区域由m个WiFi AP覆盖,在第i个网格点接收到的RSS值表示为Fi(ri1,ri2,…,rim),rim表示该样本中接收到来自第m个AP的RSS值,由此构建离线指纹数据库D=(Li,Fi)。


(1)

(2)
3 距离和属性加权的FWKNN
3.1 距离加权
距离加权的KNN算法的基本思想是:在线测试点与离线样本的距离越小关系越密切,根据它们之间的距离大小给离线样本赋予不同的权重,距离越小权重越大。权重是通过函数w(·)实现的距离变换而得到的。那么,用于预测的式(2)可以重写为式(3)

(3)
对距离进行权重赋值最简单的方法就是权重定义为距离的倒数,但是这种方法在距离很小时权重会很大甚至无限大,对算法造成干扰。为了克服这种缺点,选择使用高斯函数来进行权重计算,其形式如下
本文使用其标准正态分布形式,即b=0,c=1。为了保证距离为0时权重为1,令a=1,即函数w(·)可以表示为式子(4),距离与权重的关系图像如图2所示。

(4)

图2 距离与权重关系图像
函数w∈[0,1],满足一下性质
1)w(0)=1
2)函数w(·)递减(较大的距离意味着较低的函数值)
3)limd→infw(d)=0
3.2 属性加权
按属性加权的KNN算法的基本思想是:当属性比较多的时候,这些属性对结果的影响并不相同,可能会有一些无贡献的属性,所以不能对这些属性一视同仁,如果没有区别的去对待它们,那么在计算欧式距离时,一些关键属性对结果的影响就会被削弱,使得最终结果出现较大偏差,所以需要对不同的属性赋予不同的权重[8]。
把定位点接收到的RSS称为主特征,因为RSS在定位中是十分重要的,如图3,假设有六个AP,一个定位点可以接收到来自六个AP的RSS值,即六个主特征,但这六个特征对定位结果的贡献并不相同,如图所示b点与AP6之间有障碍物的阻挡,此时b点接收到的来自AP6的RSS值并不准确,会影响近邻点a的选择,造成定位结果的偏差。当b点位于靠近AP6的角落时,受墙壁的折射影响也会更大,接收到来自AP6的RSS值同样对定位结果的贡献不大,会对更相关的主特征RSS定位造成影响。

图3 RSS对定位性能的影响
受属性加权思想的启发,对Fi(ri1,ri2,…,rim)中的所有主特征分配一个权重,该权重确定主特征对于预测测试点坐标的可靠性,这个可靠性使用在线测试点和离线样本对应RSS值的差(特征距离)来衡量,对不同的特征距离赋予不同的权重,特征距离越大所赋予的权重就越小,减小不相关主特征RSS对定位性能的影响。

(5)
采用高斯函数确定不同距离的特征的权重,即为特征权重,表示为式(6)

(6)
3.3 距离和属性
本文提出的距离和属性加权定位方法FWKNN结合了距离加权和属性加权两种方法的优点,由最近邻的最相关主特征RSS来预测在线测试点的位置。

(7)
此距离用于选择最近邻的K个坐标Lj(j=1,2,…,K),加权距离能够更准确的计算各点的距离并选择合适的最近邻点。
利用式(8)计算预测坐标
(8)
为了说明所提出的加权距离的优势,本文基于仿真数据对传统欧式距离和加权距离进行了比较。考虑4个测试点,2个参考点和4个WiFiAP接入点,由仿真获取各点的坐标及RSS值并进行计算,如图4所示。分别计算测试点与两个参考点之间的实际坐标距离比值rd,信号欧式距离比值ed、加权距离比值wed。表1是4个测试点与2个参考点间的信号欧氏距离和加权距离的比较。可以看出,与欧式距离相比,测试点和参考点间的加权距离的比值更接近于实际坐标距离的比值,因此使用加权距离来选择近邻点是优于传统欧式距离的。

图4 仿真获取数值进行计算

表1 信号欧式距离和加权距离
FWKNN算法的流程图如图5所示。

图5 FWKNN算法流程图
由上述定位方法可以得到在线测试点的一个位置估计,然后可以根据上一时刻的位置和速度来预测出当前位置。综合这个预测位置和定位方法所得的估计位置,对它们做一个加权平均作为最终定位结果,权值的大小由估计位置和预测位置的不确定性程度决定,本文按照卡尔曼滤波的方法做加权,由此得到一个更加精确的定位结果。
卡尔曼滤波器预测原理如下:
1)由上一时刻的状态加上外界的输入预测当前状态。
2)预测过程增加的新的不确定性,加上之前存在的不确定性构成预测结果的不确定性。
3)计算卡尔曼增益(权重),根据预测值和观测值的不确定性来计算。
4)对预测值和观测值这两个结果做加权平均,得到当前的一个状态估计。
5)更新本次状态估计的不确定性。
4 实验
4.1 获取RSS数据
本文使用实际测量的RSS数据建立离线指纹数据库进行定位算法的验证分析,定位环境设置在某实验楼五楼实验室,实验室放置了6个WiFiAP用于RSS数据的采集。定位区域长为9.6m,宽为6.6m,测量时每隔0.3m进行RSS数据测量,共673个参考点,以1s的频率采集RSS值,在每个参考点处测量20s,然后取20次测量数据的平均值作为该参考点的测量结果,建立离线指纹库。另外又测量了五个行走轨迹作为测试数据,每个轨迹包含40个测试点,如图6所示。

图6 定位区域示意图
4.2 实验结果与分析
本文采用距离误差作为性能指标,对KNN、GWKNN[9]和FWKNN等定位算法进行计算和比较,并且比较了FWKNN算法在卡尔曼滤波前后的结果,同时将FWKNN算法与多种定位模型进行了比较。

图7 不同数量最近邻点下的平均定位误差
为了验证所提出的算法能够显著提高定位精度,以轨迹1为测试数据进行验证。首先对最近邻点个数以及WiFiAP个数对定位性能的影响进行探究。图7是FWKNN算法在不同数量的最近邻点下的平均定位误差,从图中可以看出结果随着近邻点个数的不同呈现出一个波动的状态,过大过小都会导致误差增大,当最近邻点数为9时平均定位误差最优。图8显示了不同数量的WiFiAP对不同定位方法影响,可以看出6个AP足以用来进行定位算法的验证比较。当选取的最近邻点个数为9时,FWKNN、GWKNN和KNN的定位误差累计概率分布如图9所示,从概率分布图中可以得出FWKNN的平均误差在2m以内的概率约为70%,GWKNN的平均误差在2m以内的概率约为50%,KNN的平均误差在2m以内的概率为40%左右。

图8 AP数量的影响

图9 定位误差累积概率分布图
以轨迹1为测试数据,最近邻点数为9对KNN、GWKNN和FWKNN进行具体分析。表2是三种算法的定位误差。从表中可以看出,从均值和最大值误差来看,FWKNN方法都是优于KNN和GWKNN的,误差最小值较KNN和GWKNN大,但也没有相差多少。以轨迹1为测试数据,就平均定位误差而言,本文所提出的距离和属性加权的定位方法FWKNN的定位精度与GWKNN相比提升了27.5%,与KNN相比提升了37.1%。

表2 定位误差对比 m
本文尝试使用卡尔曼滤波方法来精确FWKNN算法的定位结果,图10为FWKNN在卡尔曼滤波前后的定位误差累积概率分布图对比,测试数据为轨迹1,最近邻点数为9。表3是滤波前后定位误差。经卡尔曼滤波后的FWKNN算法虽然定位误差均值较滤波前大,但是从定位误差累积概率分布图中可以看出,在2m内的定位精度滤波后较滤波前是有明显提升的,滤波后FWKNN算法的定位精度在2m以内的概率提升到80%左右,而滤波前只有70%左右。
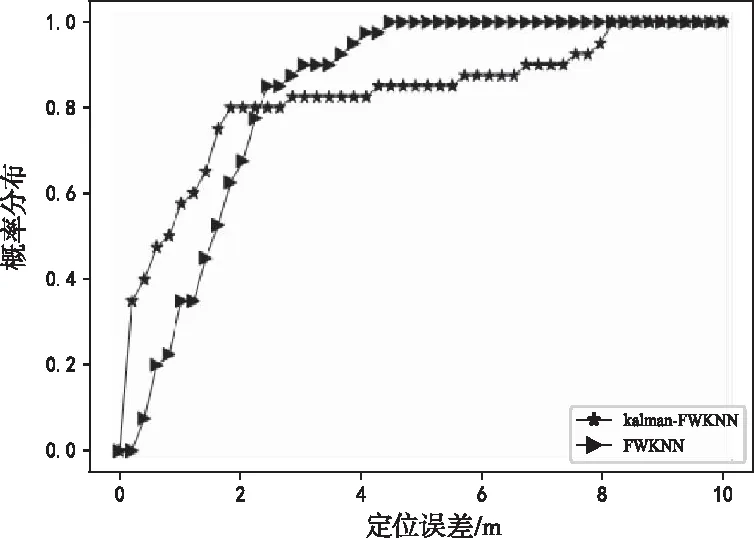
图10 卡尔曼滤波前后定位误差累积概率分布图
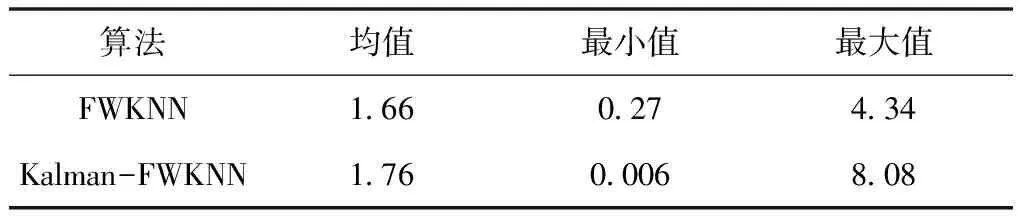
表3 滤波前后定位误差对比 m
为了更直观的显示本文所提出的FWKNN算法能有效提高定位精度,以五个行走轨迹为测试数据,对KNN、GWKNN和FWKNN等定位算法进行计算和比较,图11给出了测试点数为40~200时不同算法的平均定位误差。从图中可以看出,FWKNN算法的定位误差始终低于其它两种算法。总体而言,当选取的最近邻点个数为9,测试点个数为200时,本文所提出的FWKNN算法的平均定位误差为1.96m,与KNN和GWKNN相比分别提升了34.6%和27.1%。

图11 不同个数测试点的平均定位误差比较
表4是当测试点个数为200时,本文提出的FWKNN定位算法与多种定位模型的定位均值误差表。由表4可以看出本文提出的FWKNN定位算法的定位精度优于支持向量回归等多种定位模型。

表4 多种定位方法的均值误差比较 m
5 结语
本文提出了距离和属性加权的KNN室内定位方法FWKNN,结合了距离加权和属性加权这两者的优点,利用主特征RSS的权重计算加权距离,该距离取代了传统的欧式距离,对K个最近邻加权距离分配权重,加权均值,由最近邻的最相关主特征RSS预测测试点坐标。与KNN、GWKNN等定位算法相比,考虑到了主特征RSS的权重,能够更准确的计算各点的距离并选择合适的最近邻点,平均定位精度分别提高了34.6%和27.1%。并且实验证明了卡尔曼滤波能够精确定位结果,滤波后FWKNN算法的平均定位误差在2m以内的概率由原来的70%左右提升到80%左右。同时实验结果还表明,FWKNN算法与其它多种定位模型相比都具有一定优势。