三峡高海拔山区500 kV输电线路人工与无人机组合巡视模式的探究
2022-09-24吴宇鑫李小来王伟东高北晨杨世强袁铱晨张学锋
吴宇鑫,金 哲,李小来,王伟东,高北晨,杨世强,孔 韬,袁铱晨,张学锋
(国网湖北省电力有限公司检修公司,湖北 武汉 430050)
0 引言
三峡地区超高压输电线路特别是跨区输电线路所经过的地理条件较为复杂,所处自然环境相对比较恶劣,加大了输电线路运维工作[1-2]的劳动强度和巡视难度。输电线路杆塔经过长时间的运行会产生一些隐患和缺陷[3-6],会给输电线路运行带来一定的危害,轻则影响线路运行,重则造成设备损坏、线路停运。线路巡视是运维人员工作重点。
随着输电线路投运的数量越来越多,为提高输电线路运维精益化管理水平[7-12]和规范巡视模式,相关学者开始探索研究新的输电线路运维模式[13-18]。无人机技术[19-23]作为一种新兴技术,越来越多的应用于输电线路巡视工作中,文献[24]研究四旋翼无人机在输电线路巡视作业中的优势,文献[25]研究高海拔地区无人机巡检所需技术条件,文献[26]研究气象环境对无人机巡检作业的影响并给出了防倾覆策略,文献[27]研究小型无人机在输电线路故障点查找方面的应用,文献[28]研究无人机在输电线路除冰方面的应用。为了提高无人机定位精度和巡检质量,相关学者研究了无人机自主巡检技术在输电线路巡检工作方面的应用[29-39]。对于新型运维模式的研究,有研究一种基于直升机、无人机及地面人工巡视的全新互补工作机制。也有研究人员针对人工和无人机联合巡视工作深入开展提出了对策和建议。目前没有文献对无人机自主巡检在杆塔基础缺陷发现方面存在的劣势进行深入分析,所以提出的人工和无人机组合巡视模式缺乏一定的数据支撑。
1 线路概况
1.1 线路概况
500 kV盘宜一、二回,重庆九盘变电站至宜昌换流站的两条平行线路,盘宜一回共338 基杆塔,全长161.457 km;盘宜二回共325基杆塔,全长158.720 km,线路走向图,如图1所示。

图1 500 kV盘宜一、二回线路走向图Fig.1 500 kV Jiupan-Yichang primary circuit and second circuit route map
1.1.1 线路所处地形条件
盘宜一回所处高山占67%,长度约108.18 km,丘陵占31%,长度约50.05 km,平原占2%,长度约3.23 km,其中无人区、交通困难地区和交通不便区线路长度达67.81 km,占比约42%;盘宜二回所处山地占64%,长度约为101.58 km,丘陵占28%,长度约为44.44 km,平原8%,长度约12.70 km。
1.1.2 线路所处气候条件
除开微地形微气象区,盘宜一、二回所处巴东、秭归、夷陵均以亚热带疾风气候为主,常年风速为6 m/s~20 m/s,极端天气达到过27 m/s~29 m/s。
1.1.3 线路所处特殊区段
经过调查近3 年运维数据发现,盘宜一回所处树竹速长区达53.28 km,占线路总长33%;所处易覆冰区达41.98 km,占比约26%;所处雷电多发区59.74 km,占比约37%;地质灾害频发区29.06 km,占比约18%;山火易发区56.51 km,占比约35%,其中有一个微地形微气象区,位于荒口坪,长度2.91 km,占比约1.8%。
结论:500 kV 盘宜一、二回线路路径较长,所处地形条件复杂多变,且以大山峻岭为主,交通条件极为艰苦,线路所处特殊区段较多包括微地形区、微气象区、雷电多发区、地质灾害区、山火易发区、易覆冰区等。
2 无人机自主巡检工作体系简介
无人机自主精细化巡检技术简称“无人机自主巡检”,是基于高精度RTK定位(厘米级)技术,通过激光点云航线规划方式,让无人机具有自主巡视功能。无人机自主巡检设备组成与信号传输示意图如图2所示。
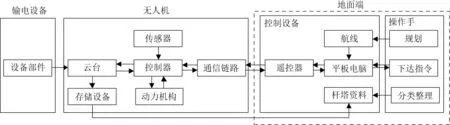
图2 无人机自主巡检设备构成及信号传输示意图Fig.2 Composition of UAV autonomous inspection equipment and diagram of signal transmission
3 缺陷发现优缺点对比分析
3.1 缺陷发现总体情况
本文调查2021年4月至2021年6月人工巡视及无人机自主巡检缺陷报表进行对比分析,无人机自主巡检发现的500 kV 盘宜一、二回不同种类的缺陷条数,如表1所示。
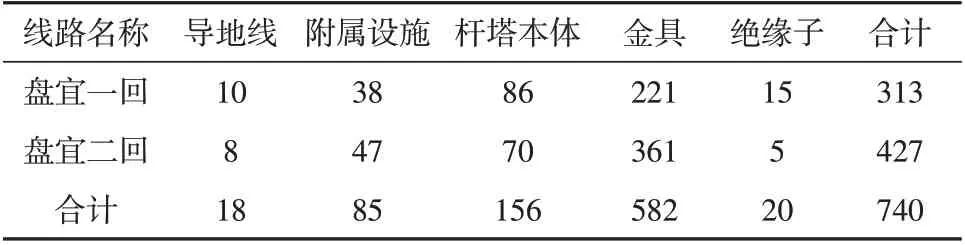
表1 无人机巡检缺陷表Table 1 Defects of UAV routing inspection
输电运维人员通过人工巡视发现不同缺陷种类及条数,如表2所示。
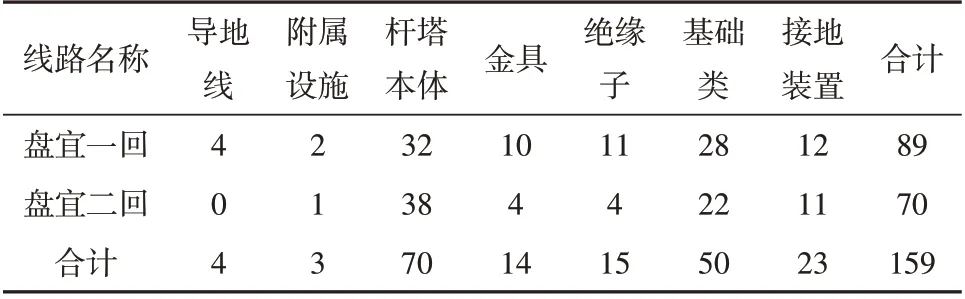
表2 人工巡视缺陷表Table 2 Defects of manual inspection
将表1和表2中的数据绘制柱状图,如图3所示。
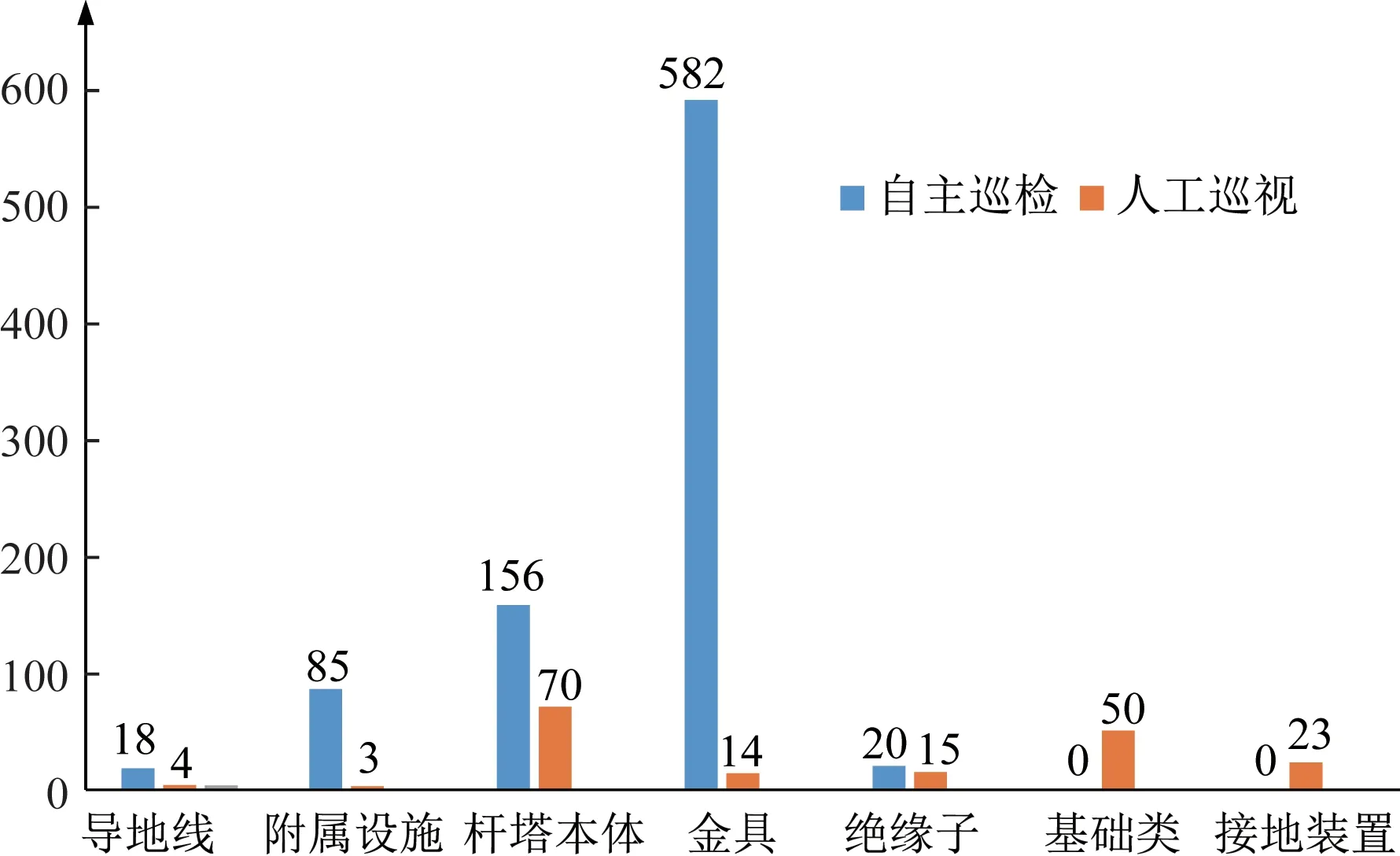
图3 人工巡视和无人机巡检发现缺陷数量柱状图Fig.3 Histogram of defects found in human inspection and UAV routing inspection
由图3 可以看出,在导地线类、附属设施类、杆塔本体类、金具类无人机自主巡检比人工巡视发现数量大得多,绝缘子类自主巡检与人工巡视发现数量接近,在基础类和接地装置类人工巡视具有优势。
3.2 不同类型缺陷发现情况
以图4为例说明无人机和人工巡视发现缺陷条数的从属关系,其中A圆表示人工发现的缺陷条数,B圆表示无人机发现缺陷条数,圆A与圆B相交部分为人工与无人机共同发现缺陷条数,①代表人工巡视发现无人机未发现缺陷条数,②代表人工与无人机共同发现缺陷条数,③代表无人机发现人工巡视未发现缺陷条数。
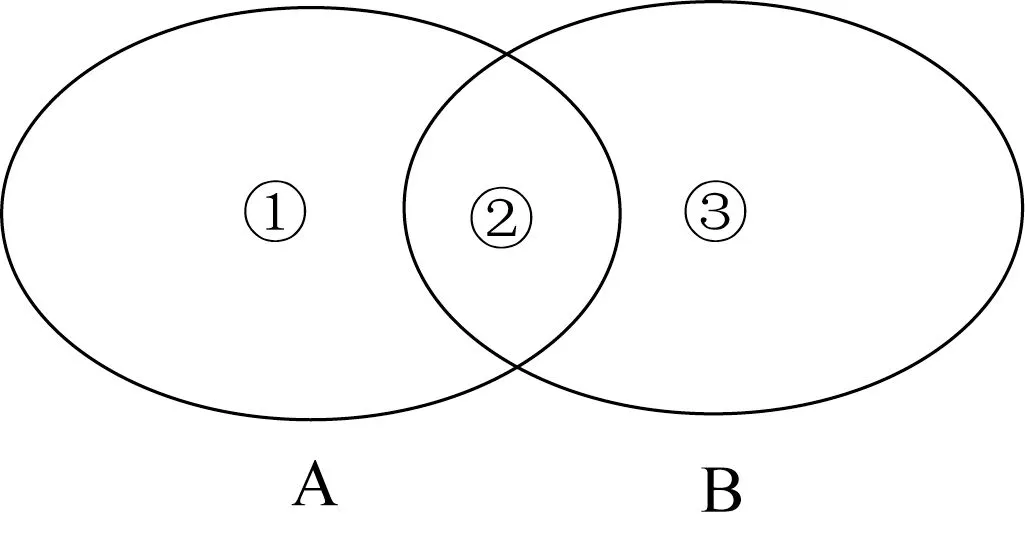
图4 人工与无人机巡视缺陷条数从属关系示意图Fig.4 Diagram of subordinate relationship between manual and UAV inspection defect number
不同类型缺陷数量如图5-图11所示。
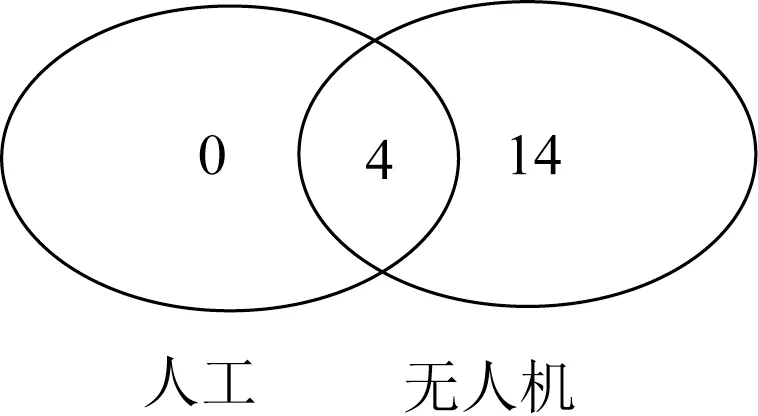
图5 导地线类缺陷数量Fig.5 Defect number of grounding wire class
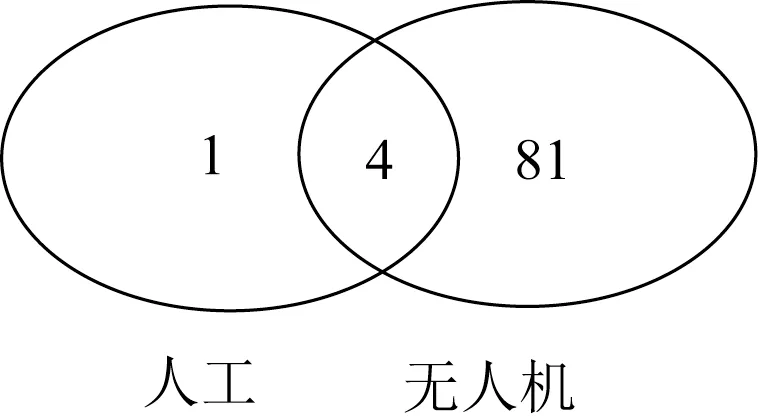
图6 附属设施类缺陷数量Fig.6 Defect number of ancillary facilities class
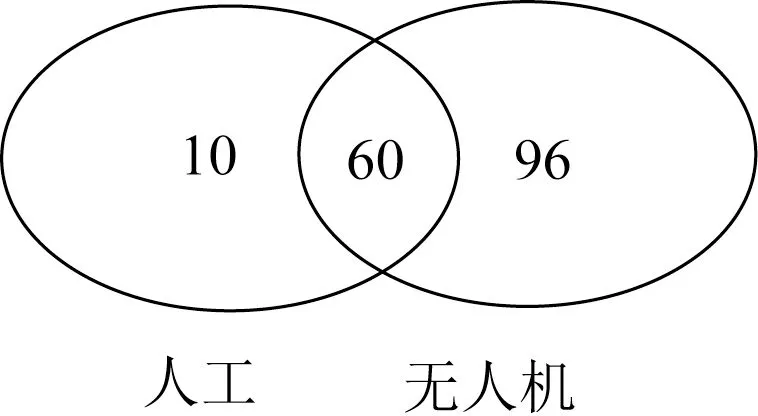
图7 杆塔本体类缺陷数量Fig.7 Defect number of tower body class
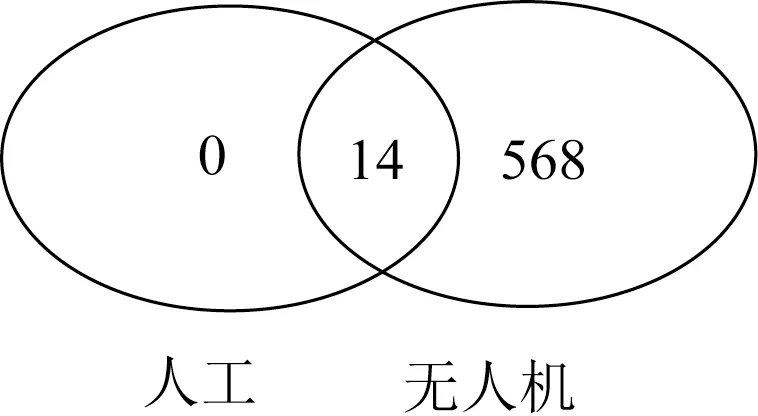
图8 金具类缺陷数量Fig.8 Defect number of fittings class

图9 绝缘子类缺陷数量Fig.9 Defect number of insulator class

图10 基础类缺陷发现情况Fig.10 Defect number of tower foundation class
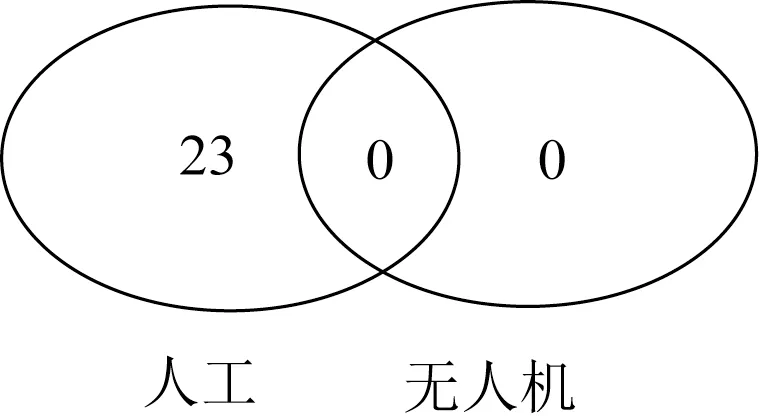
图11 接地装置类缺陷发现情况Fig.11 Defect number of tower grounding device class
按不同缺陷类型将人工巡视与无人机巡视发现缺陷条数、缺陷发现率的情况进行统计,如表3所示。
由表3可知,从缺陷发现条数和缺陷发现率来看,无人机自主巡检在导地线类、附属设施类、杆塔本体类、金具类等杆塔瓶口及以上杆塔部分的缺陷发现方面具有绝对优势,但在基础类和接地装置类缺陷及瓶口以下杆塔部分缺陷发现方面存在不足,而人工巡视在基础类、接地装置类缺陷发现方面具有绝对优势。

表3 无人机巡检与人工巡视发现缺陷情况统计表Table 3 Defects of UAV routing inspection and manual inspection
下面将对无人机在基础缺陷方面存在的劣势进行进一步分析。
4 基础类缺陷自主巡检未发现原因分析
将人工巡视盘宜一、二回16条基础类缺陷进行剖析,发现基础类缺陷可以分为危石类、挡土墙或堡坎出现损伤、附近山体滑坡或垮塌。基础类缺陷类型占比如图12所示。

图12 基础类缺陷各类型占比Fig.12 Proportion of different foundation defects
基础附近存在危石缺陷占比最大为50%,因为无人机航线设置的拍摄角度和范围与杆塔结构设置使得无人机存在视野盲区,故无法发现。
进一步分析发现基础类缺陷由于有遮挡物、方位差、视角差、云台参数设置错误、云台高度过低等原因,导致所拍摄的照片中基础信息不全,对查找缺陷带来一定困难,具体的杆塔数量如表4所示。遮挡物遮挡、云台参数设置错误、云台高度过低占绝大多数,进一步分析原因。

表4 无人机未发现基础类缺陷的杆塔数Table 4 Number of towers with basic defects that UAV failed to detect
4.1 遮挡物遮挡
杆塔基础附近有杂树、杂草、农作物、杂物等会造成照片中杆塔基础被覆盖,缺陷信息无法判定,因杂树、杂草、农作物、杂物堆砌导致自主巡检杆塔基础被遮挡的杆塔数量如表5所示。

表5 基础有遮挡物的杆塔数Table 5 Number of towers with shelter on the foundation
塔脚被杂树和杂草遮挡的杆塔以秭归荒口、九山坪、晓峰河段为主,因为该段地形复杂通常杆塔较高,基础附近存在不影响运行的杂树、杂草。塔脚被农作物遮挡以秭归郭家坝、沙镇溪段为主,该段农户大量种植柑橘树等经济作物。杂物堆砌较少,主要集中在巴东跨江、龙泉进站段,因为该段杆塔附近土壤肥沃,农户在塔基附近开垦种植,就近将一些锄地后的杂草堆砌在塔脚处。由于杆塔所占征地面积以外的土地并未进行征收,所以经过长期运行,杆塔征地范围外的杂树、杂草生长至一定高度后,对杆塔基础形成了遮挡,由于生长速度和生长方向的不同,杆塔被遮挡的基础情况也不尽相同。
4.2 云台参数设置错误
云台参数设置错误,导致云台拍照时所处角度错误,导致杆塔基础并不在云台所拍摄范围内,所以照片获取不到所想要的杆塔基础,如图13-图14所示。
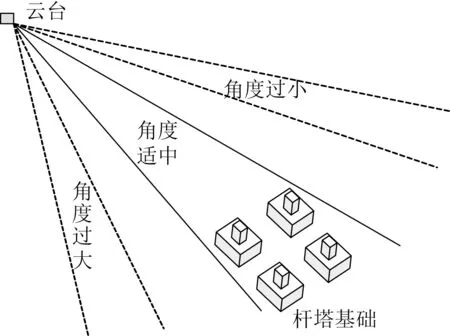
图13 无人机云台角度示意图Fig.13 Diagram of setting UAV PTZ angle

图14 云台角度过小的杆塔照片Fig.14 Image of tower with too small PTZ angle
将盘宜一、二回云台拍摄角度错误的杆塔进行统计,如表6所示。从表6分析可知,盘宜一、二回多种塔型均出现过因云台角度过小导致照片获取不到杆塔基础的现象,所以云台角度设置错误与杆塔形式无关,而出现这种现象是因为航线编辑过程中云台角度设置过小,且航线编辑完成并发现相应参数设置问题。

表6 无人机云台角度设置错误的杆塔及其参数Table 6 Towers and their parameters with wrong PTZ angle setting of UAV
4.3 云台高度过低
不同杆塔根开是不同的,原本根开更大的杆塔应该在更高的高度拍摄才能将杆塔基础全部加载至云台的拍摄框内,而杆塔航线是根据航线模板批量生成的,无人机没有到达相应的高度就进行了拍照,导致获取杆塔基础信息不全。
进一步分析云台在拍照时的动作,云台在正常高度下拍照时的侧视图及俯视图如图15所示,在云台高度达到H时,杆塔基础均在云台拍摄范围内。
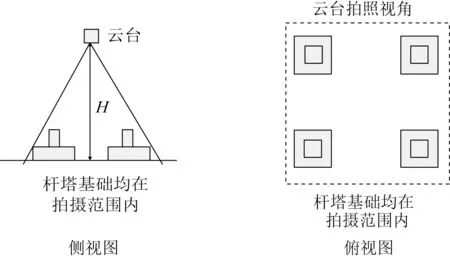
图15 正常高度下云台拍摄杆塔基础示意图Fig.15 Schematic diagram of tower foundation with PTZ at a normal height
如果以此杆塔作为模板来绘制其他同类型杆塔航线时,如果飞行高度是根据杆塔高度来进行调整的,从H调整为H+ΔH,其中ΔH为杆塔呼高差,而不是根据杆塔基础根开大小来进行调整,那么杆塔基础则可能未在云台拍摄范围内,如图16所示。
进一步将照片中基础信息不完整的杆塔型号进行统计,如表7所示。

表7 因云台高度过小的杆塔及其参数Table 7 Parameters of too small PTZ height tower
由表7 分析可知,根开过大的杆塔集中在ZB3 型呼高45 m及以上杆塔和ZB4型呼高39 m及以上杆塔,由于绘制过程中按照杆塔模板进行目标杆塔航线绘制,仅根据目标杆塔高度增加无人机飞行高度,并没有按照每基杆塔实际根开大小进行高度的调整,造成部分杆塔塔型基础并没有全部拍摄下来。但是因为存在限高和拍摄不清楚的问题,云台高度不能一味地加高,云台高度需要根据现场实际飞行经验结合杆塔形式和参数来确定。
5 人工与无人机组合巡视模式探究
5.1 不同巡视任务或巡视方式下的组合巡视模式
由以上分析可知,人工和无人机巡视各有优缺点,在不同巡视任务或不同巡视方式下人工与无人机占比不同。在日常巡视下,应以无人机巡视为主,人工巡视辅助,无人机可以比较好地发现杆塔本体所具有的缺陷,而对塔基及以下的缺陷却比较难以发现,人工巡视可以发现基础及地网类缺陷;特殊巡视,包括红外测温、登杆检查、三跨检查,应以无人机巡视为主对重点检查部位进行精细化巡检;故障巡视下,应以无人机巡视为主,可以缩短每基杆塔故障查找时间,待确定故障点后人员登杆检查,采集照片资料;灾害巡视时,应以地面人工巡视为主,无人机巡视为辅,待无人机确定灾害发生位置和巡视道路安全状况之后,再由人工前往灾害发生位置确认情况。
5.2 输电线路不同部位的组合巡视模式
根据以上分析可知,无人机在杆塔本体缺陷发现方面具有较大优势,人工巡视在基础类、接地装置类、地面附属设施类具有优势,所以利用无人机重点查找杆塔本体缺陷,而杆塔下方缺陷如基础、地网、杆号牌、附属设施则由人工重点进行检查,通道环境类缺陷如山火、异物、外破等则由固定翼无人机“云巡”方式进行重点检查,通道环境内的树障则由无人机激光扫描为主,人工巡视为辅。运行工况的检查红外测温由无人机进行重点检查,弧垂观测、覆冰观测、风偏观测则由人工巡视重点检查。
5.3 不同地形和天气条件下组合巡视模式
5.3.1 平原地形交通易到达地区
平原地形下,基础类和树障类缺陷相对较少,居民活动频数较多,建议无人机精细化巡视周期为半年,人工巡视周期为3 个月,并适当增加群众护线员巡视频次,确保巡视能够不间断。
5.3.2 山区地形交通较难到达地区
山区地形下,基础类缺陷和树障类缺陷相对较多,居民活动频次较少,建议无人机精细化巡视周期为1 a,人工巡视周期为半年,保证停电检修作业开展前无人机自主精细化巡检全覆盖。
5.3.3 无人区和大跨越交通条件极为不便地区
无人区和大跨越地形条件下,考虑安全和人员劳动强度因素,建议无人机精细化巡视周期为1 a,人工巡视周期为1 a,可结合停电检修、故障巡视、带电作业等方式进行登杆检查。
5.3.4 微气象区易覆冰区
由于车辆人员难以到达,考虑车辆及人员安全因素,建议覆冰期到来之前进行一次无人机精细化巡视和人工巡视,以确保输电线路安全稳定运行;当覆冰期到来之时建议当地护线员在有条件情况下进行人工巡视;当覆冰期过后,建议进行一次无人机巡视以检查设备运行情况。
5.3.5 山火易发区、地质灾害易发区、鸟害多发区
由于线路走向比较长,往往难以同时对多个现场进行管控,建议结合季节特点进行无人机通道1 周1次,确保特殊时期巡视全覆盖。
5.3.6 外破点和居民活动密集区
外破点和居民活动密集区,为防止线路因外破、异物、垂钓等情况造成外力破坏事故,从而影响线路运行,并适当增加人工巡视频次,确保1周3次。
6 结语
本文以500 kV 盘宜一、二回为例,分析了超高压输电线路运维工作重点与难点所在,对无人机自主巡检工作体系进行了介绍,重点分析了无人机巡视和人工巡视在杆塔各部位的缺陷发现方面所具有的优劣势。经过分析找到了无人机难以发现基础类缺陷的深层次原因,并在此基础上提出了一种人工和无人机组合巡视的新模式。
