一种水面垃圾清理机器人设计
2022-09-23张芙蓉汤泽军
张芙蓉,汤泽军
(长沙航空职业技术学院,湖南 长沙 410124)
0 引言
现有的水面垃圾清理机制尚不成熟,以城市人工湖等静态水域为例,大多数清理工作都是由人工作业完成,清洁工人一整天都要在河道内清洁垃圾,不但浪费大量人力、物力,也影响景点的美观;后续出现的垃圾清理船,对于一些悬浮于水中的垃圾清理效果差,且对于垃圾的清理效率低。为解决上述问题,本文设计了一种针对静态水域水面漂浮物的无人操作水面垃圾清理机器人。
1 系统整体设计
水面垃圾清理机器人系统由水面垃圾清理机器人和远程遥控平台两部分构成,系统总体设计框图如图1所示。水面垃圾清理机器人由传感器模块、电源模块、水面垃圾清理机器人控制器模块、执行模块以及通信遥控系统等组成。
1.1 传感器模块
传感器模块包括摄像头识别传感器、超声波距离传感器、风速风向传感器、GPS定位传感器、姿态检测传感器和垃圾箱满传感器等。传感器模块可实时获取湖面垃圾视频、障碍物距离,风速和风向等环境信息、机器人GPS位置和姿态、垃圾箱状态等信息。
1.2 水面垃圾清理机器人控制器模块
水面垃圾清理机器人控制器模块采用AIstart人工智能主机,它包括一块K210核心主控,集成了摄像头、TF存储卡、LCD显示、左右声道喇叭、耳机接口、USB Type-C、RGB全彩灯、多功能按键、GPIO拓展端口等资源。K210核心主控是基于双核RISC-V 64位处理器,RISC-V是开源指令集架构(ISA),指令简单且高效。边缘计算的KPU进行神经网络加速,官方Demo中提供了一些人脸检测、图像识别、图像分类的视觉任务,分类任务的分类网络推理速度最高可达到240 fps。检测任务在QVGA的网络下,模型帧率最高可达35 fps。乘法操作算力0.23TOPS,总算力1TOPS,芯片内置多种硬件加速单元(如CNN,FFT,SHA256等),及8 M超大高速SRAM,实现机器视觉算法;1TOPS算力,只有0.3 W的功耗。可通过传感器模块的输入信息对水面漂浮物进行识别,实现水面清理路线规划,达到自动清理垃圾的目的。
1.3 电源模块
电源模块由充电电池和太阳能电板构成。充电电池采用12 V、60 Ah的3串20并18650电池组,充电可通过岸边市电适配器充电,电池电量信息能本地显示。机器人水面工作时,可把电量信息无线传送给远程遥控平台;太阳能电板可对充电电池进行充电,可提升系统的续航能力。
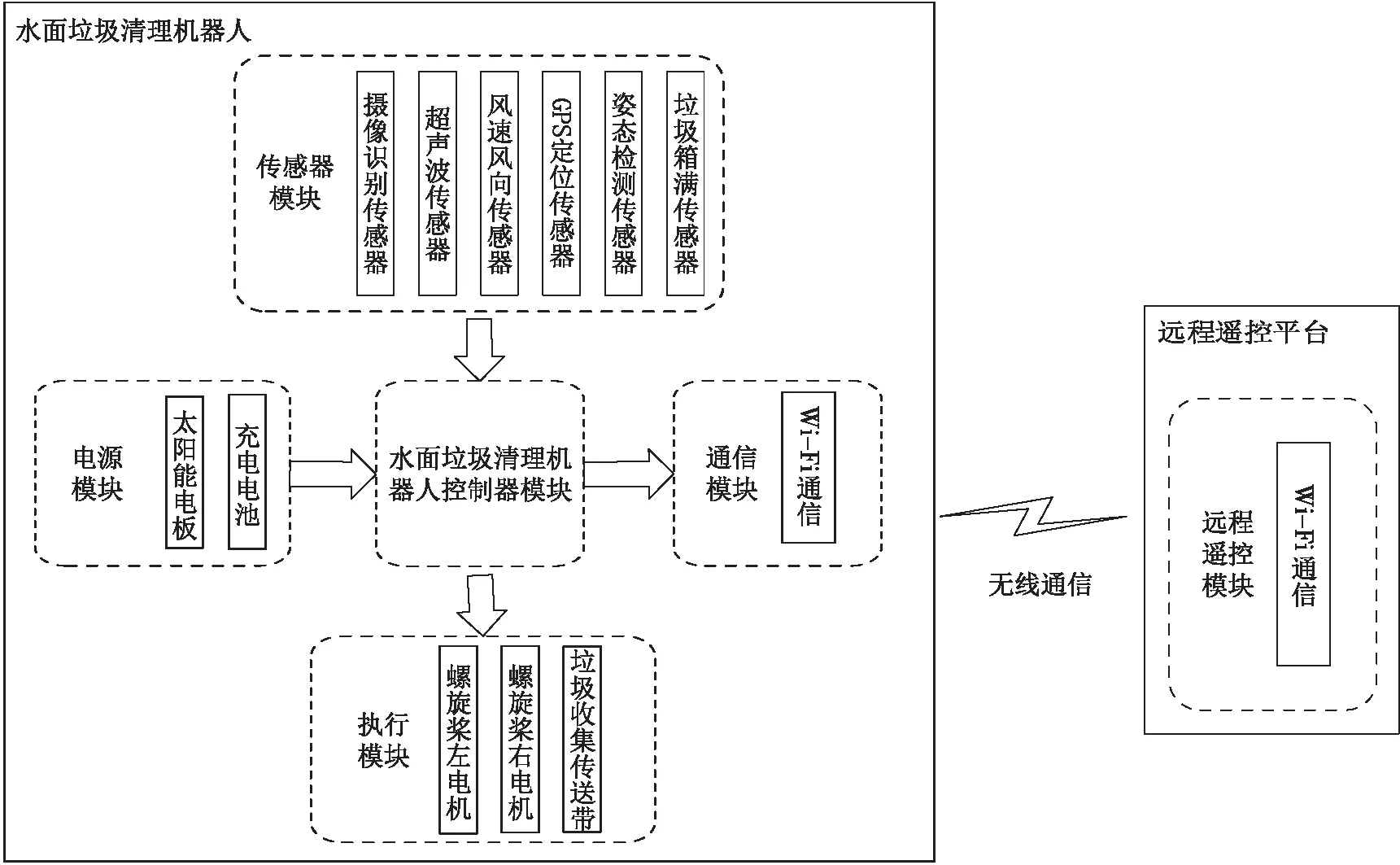
图1 系统总体设计框图
1.4 执行模块
执行模块由螺旋桨左电机、螺旋桨右电机、垃圾收集传送带电机和驱动构成。执行模块由水面垃圾清理机器人控制器模块进行控制,对螺旋桨左右电机进行驱动,实现机器人在湖面的移动;对垃圾收集传送带电机进行驱动,把水面垃圾经垃圾收集传送带传送到垃圾箱。
1.5 通信模块
通信模块通过Wi-Fi模块实现水面垃圾清理机器人与远程遥控平台通信,实现远程视频信息、状态信息、遥控指令信息的传输。远程遥控平台可控制机器人工作模式,获取机器人摄像头工作视频、机器人状态,遥控机器人进行动作。
2 结构设计
水面垃圾清理机器人采用流体型结构设计,大大降低航行阻力。前置超声波传感器和摄像头,左右各放置超声波传感器,能识别垃圾目标,测量障碍物距离,从而更适应复杂水域环境。垃圾箱位置设计在船体中间,可有效防止船体侧翻。辅助姿态传感器和风速风向传感器获取机器人状态,进一步提高船体稳定性。充电电池放置船体中后方,可提升船头,压低船尾,提升航速。左右螺旋桨推动设计,可缩小掉头半径,实现原地掉头和倒退。结构设计框图如图2所示。
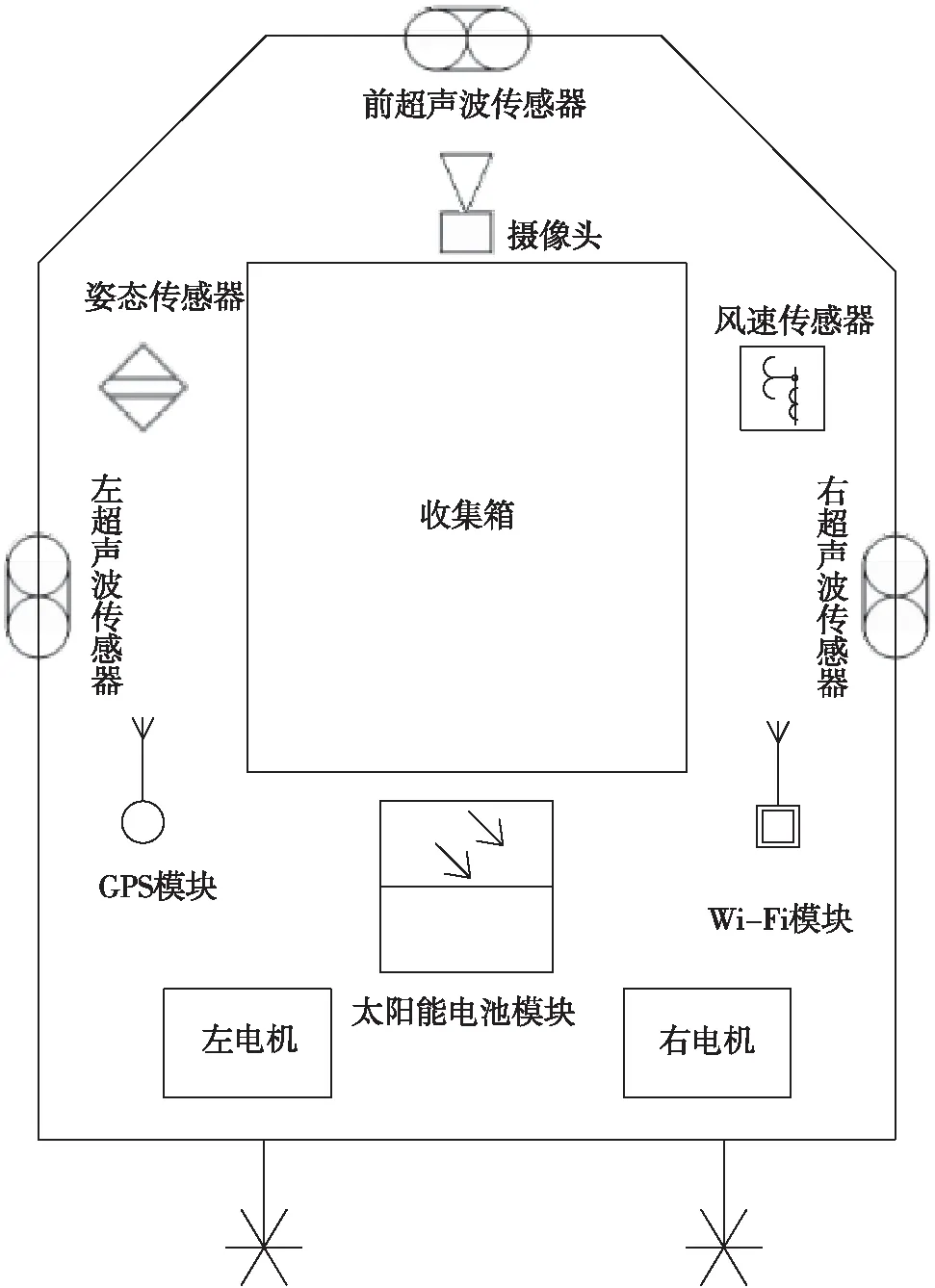
图2 结构设计框图
水面垃圾清理机器人在进行实船实验或者执行相应作业任务时,通常会因风浪流等外界因素影响而使船体产生横滚、俯仰等姿态变化,因此会导致船载的测量平面与水平面不平行,从而给出错误的障碍物检测信息,影响机器人安全航行,为此,搭载三轴重力加速度传感器来测量船体姿态。
水面垃圾清理机器人舱体内设置一个可拆卸垃圾收集箱,便于人工更换装满垃圾的垃圾收集箱,减少更换时间。垃圾收集箱内表面光洁,上边缘为圆角,便于垃圾清理。水面垃圾清理机器人前方两侧都设置有倾斜的过滤网,将垃圾向机器人前方中心汇聚。
机器人前方设置一个倾斜的输送带机构,用于将机器人前方中心汇聚的垃圾输送至垃圾收集箱,垃圾箱满传感器可获取箱满信息。输送带机构由铝型材架、减速电机、同步带、同步轮、上下端带轴承的滚筒、平皮带组成。输送带机构中,充电电池驱动减速电机旋转,减速电机通过带传动的方式带动皮带转动,将垃圾输送至垃圾收集箱。减速电机采用间断式运转的方式工作,节省电能。
水面垃圾清理机器人主要依靠垃圾收集传送电机提供动力带动垃圾流入垃圾清理箱内,以达到清理垃圾的作用。垃圾流入后通过过滤网过滤,自动流入垃圾收集箱,实现快速清理。在完成垃圾清理过程中,可对垃圾箱状态进行检测,通过在箱体上方舱体侧面设置光电式传感器,用于感应垃圾收集箱是否装满,可实时将该信号发送到清洁人员的操作终端。
由于水面工作机器人在水面作业时,频繁充电影响工作效率,考虑到水面一般能接收到太阳光,因此选用太阳能作为辅助驱动能源。考虑到水面受力情况,选用螺旋桨推进器,推进器由减速电机加上桨叶组成,固定设置在机器人的下方。工作状态下的螺旋桨推进器位于水下,螺旋桨击打水体产生推力,从而实现机器人船体的移动。
3 软件设计
水面垃圾清理机器人可通过远程遥控平台设置工作模式,包括远程遥控工作模式和自动巡航清理模式(见图3)。远程遥控工作模式:清洁人员可遥控水面垃圾清理机器人至垃圾场并进行清理。自动巡航清理工作模式:可在没有人工控制的情况下,通过 GPS 位置传感器模块、姿态传感器、前置超声波传感器、左置超声波传感器、右置超声波传感器和前置摄像,自动规划清理路线完成自动巡航清理;垃圾收集箱满后,水面垃圾清理机器人可自动回到返航记录点,此种模式垃圾收集效率更高,大大减轻了清洁人员处理垃圾的工作量。
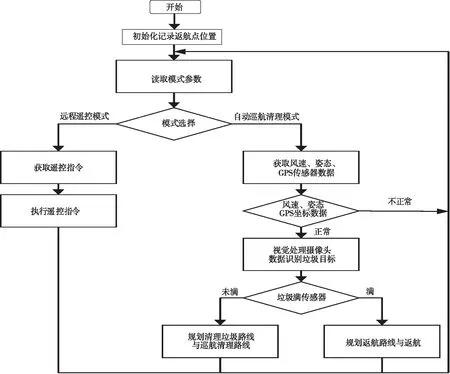
图3 水面垃圾清理机器人工作流程图
3.1 远程遥控工作模式
清洁人员手持远程遥控平台,通过平台上的安卓app远程设置水面垃圾清理机器人为远程遥控工作模式,这时远程遥控平台可接收并显示水面垃圾清理机器人远程传来的视频信息和状态信息,清洁人员可根据视频内容和状态信息,发出相应的遥控指令给水面垃圾清理机器人,水面垃圾清理机器人接收遥控指令,并根据指令内容执行相应动作。
3.2 自动巡航清理工作模式
在自动巡航清理工作模式下,远程遥控平台也可获取水面垃圾清理机器人远程传来的视频信息和状态信息。当接收到的远程信息显示异常,表明出现特殊情况,清洁人员可以立即修改机器人的工作模式,解除自动巡航模式,改为远程遥控模式。
自动巡航清理工作模式先要判断当前环境是否满足自动巡航前提条件,风速过大,水面垃圾清理机器人的姿态不正确(比如船体倾斜幅度过大),GPS位置没在指定水域,软件跳过自动巡航。满足自动巡航前提条件后,视觉处理摄像头识别垃圾目标:垃圾箱未满,水面垃圾清理机器人会规划清理垃圾路线,开动垃圾收集传送带,巡航清理垃圾;垃圾箱满后,水面垃圾清理机器人会停止垃圾收集传送带,规划返航路线,并返航提醒清洁人员清倒垃圾箱。
垃圾目标识别算法通过TensorFlow深度学习框架,用MX-YOLOv3进行垃圾目标识别神经网络模型训练,接着转换成可被K210 硬件平台识别的Kmodel格式的推理模型文件,然后使用Mixly图形化开发环境下的Python语言设计实现推理模型KPU加载和KPU图像数据处理,最后AIstart人工智能主机结果输出。水面垃圾识别通过图像传感器获取水面图片,然后结合垃圾识别算法,判断是否为垃圾,由位移传感器获取垃圾位置信息,计算目标垃圾所处位置坐标,并启动机器人驶入目标垃圾所在位置,实施清理。
4 结语
为实现水面漂浮垃圾的高效清理,本文基于水面垃圾清理机器人和远程遥控平台两部分实现了水面垃圾清理机器人系统,能实现远程遥控模式和自动巡航清理模式2种工作模式。针对自动巡航模式,设计了垃圾目标识别算法,该算法能实现对常见垃圾目标的识别,将水面漂浮垃圾与水面景观、漂浮植物、水岸等成功分离开来。经测试,本文设计的水面垃圾清理机器人,能完成人工湖等静态水域水面漂浮垃圾的清理,具有良好的应用和推广价值。
