无人机编队在多点火情救援中的任务分配研究
2022-09-23訾润
訾 润
(青岛市消防救援支队,山东 青岛 266000)
0 引言
在大风雷暴等极端恶劣天气下,野外森林面临大规模火灾的安全隐患。在城市中,因为地震等不可抗力以及人为操作不当,也可能引发小区规模的火情。大规模火灾发生后,往往形成层次级火情,在外围级火情的阻隔下,对内部的火情救援变得极为困难。在消防人员无法到达的情况下,内部火场的多点散发进一步增加了救援的难度,也会危及生命财产安全。在这种情况下,通过多无人机构成的无人机编队到达人力难以到达的火场内部,完成侦查、打击火源、灭火等任务成为一种最佳选择。无人机的特点是十分突出的,无人机个体体积小、机动性强,可以穿越复杂的山体结构和建筑结构,深入探查区域的内部。同时,随着无线通信技术的飞速发展,多个无人机之间通过信息交互,协同配合去完成一个整体任务变成可能。由于无人机个体受到机械性能、载弹量(灭火弹)等条件的制约,其能完成的灭火任务是有限的,因此,当无人机编队到达火场后,必须对各个无人机合理地分配任务。这种任务分配的目的是在保证完成整体灭火任务的前提下,各个无人机相对均衡地承担整体任务的子任务,并且编队中任意一个无人机不会出现任务超载、无法完成的情况。无人机编队根据火场中多点火情的任务分配,实际上是一种有约束条件的目标优化问题。针对该问题,可以采用的优化算法很多,例如基于遗传算法的目标优化、基于图割算法的目标优化以及基于动态规划算法的目标优化等。该文采用粒子群算法对无人机编队完成多点火情救援任务进行合理化分配的研究,以期使无人机编队更好地协同配合、顺利地完成灭火救援任务。
1 无人机编队的任务分配算法
1.1 基于粒子群算法的任务分配
粒子群算法是由多个粒子构成一个粒子群,每一个粒子不断调整自身的位置和速度,使粒子群达到最优状态。各个粒子之间存在一定的约束和关联,个体独立又共同服务于整个粒子群落。
在无人机编队的任务分配中使用粒子群算法,需要将每个无人机映射为粒子群中的一个粒子。随着粒子群位置和速度不断地更新,在整个粒子群达到最优状态的情况下,每个无人机个体将找到自己的合理位置,去完成灭火救援任务。每个无人机完成自己的任务后,无人机编队也将完成整体的灭火救援任务。该策略对多点散发式火情的救援具有特别重要的意义,针对性也是非常强的。
无人机编队在整个粒子群算法的优化过程中,最重要的是找到自己的准确位置,这一对应着粒子的位置。根据粒子群算法的设定,粒子群中每个粒子的位置设置策略,可以用公式(1)表示。

式中:参数为一个随机数,其取值范围是(0,1)。
在服从于粒子群整体任务目标的前提下,每个粒子的位置会不断更新以寻求达到最佳位置,粒子群中每个粒子的位置更新策略,可以用公式(2)表示。

进一步,可以得到粒子群中每个粒子的全局最佳位置,可以用公式(3)表示。

综合以上2个方程,可以得到算法中每个粒子的更新机制,可以用公式(4)表示。

1.2 无人机编队救火任务的分配流程
在上述粒子群算法的支撑下,无人机编队为了实现多点火情的救援目标,可以按照以下5个步骤分配任务。
第一个步骤,无人机编队中的每个无人机映射为粒子群中的一个粒子,并进行自身位置的初始化配置。
第二个步骤,在粒子群中全部无人机完成初始位置配置后,整个无人机编队获得了第一个整体状态,根据这个状态构建适应度函数。
第三个步骤,在无人机编队多点火情救援的总体任务下,根据公式(2)和公式(3)不断更新每个无人机的局部最佳位置,同时计算无人机编队的全局最佳位置。
第四个步骤,根据公式(4)所示的更新机制,进一步更新整个编队中每个无人机的位置,从而再次计算整个无人机编队全局最佳位置,即对多个火情点的有效对应。
第五个步骤,不断计算无人机编队位置和多个火情点的对应位置之间的差异,判断这个差异是否小于预先设定的阈值(一个很小的数值),如果不小于,继续重复执行步骤三和步骤四,如果小于,将此时的无人机编队位置输出。
无人机编队按照步骤五输出的结果,即可以找到最合理的位置,与火情点形成对应,从而可以进行精准打击和灭火操作。
2 无人机编队多点火情救援试验研究
2.1 试验的基本情况
此处的试验在仿真环境下进行,需要在仿真平台上设置火情点位置和无人机位置,以便有针对性地分配任务,进行救援工作。
整个仿真试验的背景是野外森林火场,已探明的火情点为8个,其平面地图位置配置如下。野外森林火场中第一个火情点位置,横坐标88个仿真距离位置上,纵坐标21个仿真距离位置上;野外森林火场中第二个火情点位置,横坐标34个仿真距离位置上,纵坐标39个仿真距离位置上;野外森林火场中第三个火情点位置,横坐标51个仿真距离位置上,纵坐标30个仿真距离位置上;野外森林火场中第四个火情点位置,横坐标44个仿真距离位置上,纵坐标90个仿真距离位置上;野外森林火场中第五个火情点位置,横坐标21个仿真距离位置上,纵坐标28个仿真距离位置上;野外森林火场中第六个火情点位置,横坐标48个仿真距离位置上,纵坐标28个仿真距离位置上;野外森林火场中第七个火情点位置,横坐标81个仿真距离位置上,纵坐标71个仿真距离位置上;野外森林火场中第八个火情点位置,横坐标16个仿真距离位置上,纵坐标51个仿真距离位置上。
参与多点火情救援的无人机数量为5个,共同构成了一个无人机编队,其空间地图位置配置如下。无人机编队中第一个无人机,坐标22个仿真距离位置上,坐标28个仿真距离位置上,坐标26个仿真距离位置上;无人机编队中第二个无人机,坐标34个仿真距离位置上,坐标50个仿真距离位置上,坐标20个仿真距离位置上;无人机编队中第三个无人机,坐标17个仿真距离位置上,坐标14个仿真距离位置上,坐标45个仿真距离位置上;无人机编队中第四个无人机,坐标33个仿真距离位置上,坐标35个仿真距离位置上,坐标23个仿真距离位置上;无人机编队中第五个无人机,坐标26个仿真距离位置上,坐标31个仿真距离位置上,坐标28个仿真距离位置上。
整个无人机编队抵达森林火场上空后,要执行三类任务,分别是侦察、投灭火弹打击、灭火,灭火为最终任务。但灭火准确与否与侦察、投灭火弹打击的准确与否直接相关,因此这三项预期分值都应该参与到粒子群优化算法中。对8个火情点上,这3项任务的预期分配置见表1。

表1 森林火场中8个火情点的任务预期分配置
在各项条件的配置下,该文构建多点火情无人机编队救援仿真试验环境。在接下来的工作中,采用图割算法和鱼群算法作为对比方法,通过3种方法之间的比较,评价方法的有效性。
2.2 灭火任务整体完成情况对比试验
适应度函数的收敛速度与收敛效果直接决定了优化算法的性能,因此首先要比较图割算法、鱼群算法适应度函数收敛情况与该文粒子群算法适应度函数收敛情况的差异,结果如图1所示。
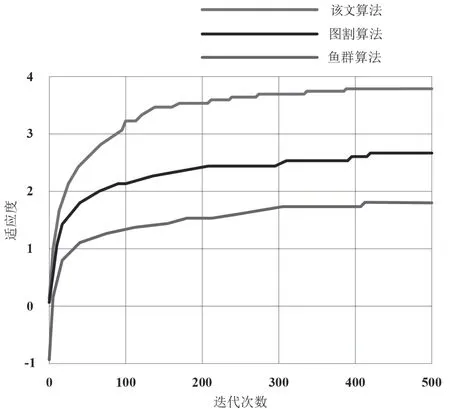
图1 各方法适应度函数收敛对比
从图1的结果可以清晰地看到,在无人机编队多点火情救援的仿真试验中,该文构建的基于粒子群算法的无人机编队任务分配,其收敛函数曲线所表现出来的收敛速度快、收敛适应度数值高,明显优于图割算法和鱼群算法。
在适应度函数收敛性能比较结果的基础上,进一步比较3种方法灭火任务的各无人机分配结果,如图2~图4所示。
从图2~图4三种方法获得的任务分配结果中可以得出以下2点:1)图割算法和鱼群算法为无人机编队进行的灭火任务分配,均不同程度地出现了某一个无人机承载任务过多的情况,也出现了同一个火情点被多个无人机执行灭火处理的冗余操作。2)该文算法获得了更好的任务分配结果,没有出现无人机过载的情况,也没有出现火情点被重复覆盖的情况,其具体的分配结果如下。第一个无人机对火情点、火情点执行灭火处理;第二个无人机对火情点、火情点执行灭火处理;第三个无人机对火情点、火情点执行灭火处理;第四个无人机对火情点执行灭火处理;第五个无人机对火情点执行灭火处理。
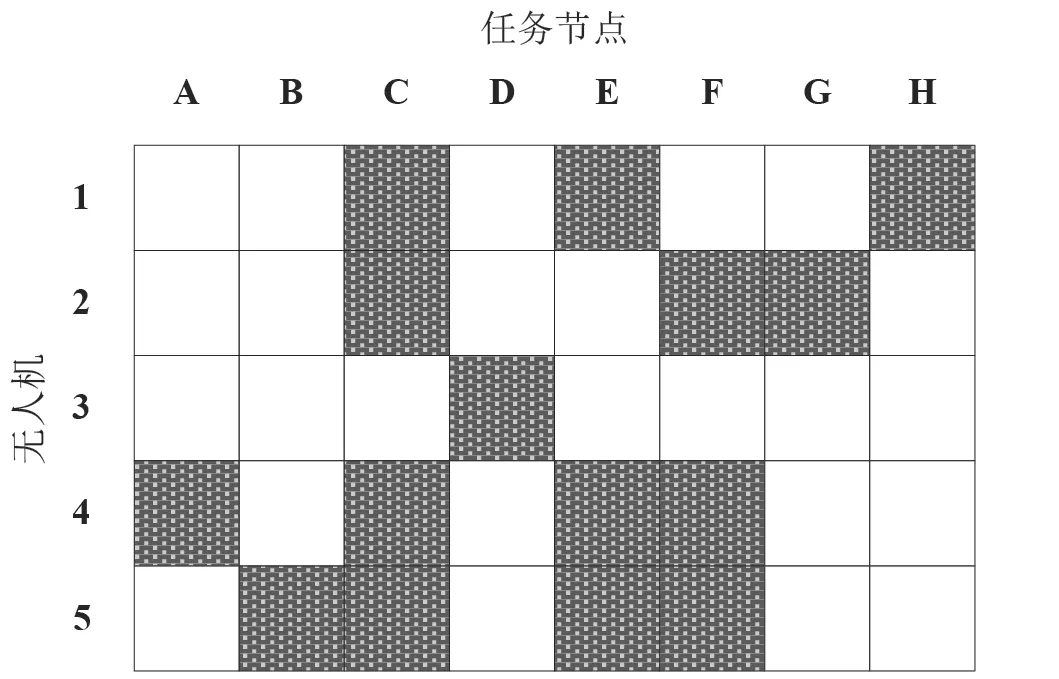
图2 图割算法获得的无人机编队灭火任务分配结果

图4 该文算法获得的无人机编队灭火任务分配结果
通过比较可以看出,该文基于粒子群算法构建的无人机编队多点火情救援任务分配可以获得更好的结果,也证明了该文工作的价值。

图3 鱼群算法获得的无人机编队灭火任务分配结果
3 结论
无论是野外森林火场还是城市小区的大规模火灾,都会出现不同程度的多点火情覆盖、层级火情阻隔等情况。针对消防救援人员难以及时到达层级阻隔火场、难以短时间内扑灭多点火情的问题,该文提出了一种基于粒子群算法的无人机编队多点火情救援任务分配方法。通过5个无人机构成的无人机编队配置和8个火情点的仿真火场配置,进行进一步研究。试验结果表明,该文提出的基于粒子群算法的无人机编队任务分配,具有更好的适应度函数曲线表现,能够更加合理地分配灭火任务,不会出现个体无人机任务过载、个别火情点冗余救援的情况,性能明显优于图割算法、鱼群算法的分配结果。
