谈实景三维助力房屋安全管理★
2022-09-21孙永康石维康杨建双
孙永康,李 杨,闫 昶,孙 磊,石维康,杨建双
(1.江苏省地质测绘院,江苏 南京 211102;2.江苏省基础地理信息中心,江苏 南京 210013)
0 引言
近年以来房屋安全事故频发,为深入贯彻习近平总书记关于安全生产工作的重要论述和重要指示批示精神,防范遏制重特大房屋建筑安全事故,房屋安全管理受到各界人士的关注。随着无人机倾斜摄影技术的高速发展,实景三维已经成为未来城市房屋安全管理的主流,同时也可为智慧城市建设、规划、治理提供基础数据支撑。
1 研究区概况
响水县位于东经119°29′~120°06′,北纬33°56′~34°33′。在盐城、淮安、连云港三市交汇处。东临黄海,与日本、韩国、朝鲜等国隔海相望。年平均气温为13.6 ℃,最高气温为38.7 ℃,最低气温为-17 ℃。年平均降水量为895.3 mL,年平均日照2 399.7 h。气候温和湿润,四季分明。全县总面积1 473.8 km2,下辖8个镇、3个工业园区,总人口60万人。
响水县城约37.68 km2(如图1所示),县城通榆河以东、双园路以北以工矿企业和部分居民小区为主,房屋高度普遍较低。部分建筑如滨江上海城等高层建筑高度超过80 m。在双园路、黄海路、珠江路、金海路围成的区域内,既有企业房屋,也有部分较高的商业和居民楼房。在通榆河以西的测区范围内无高层建筑。以银河路、金海路、黄河路为界限的以南地区,除葛庄十二组、港龙首府等小区有较高楼层外,其他区域均为较矮房屋。除去以上区域,测区内其他区域均有高层建筑,特别是珠江路、金海路、银河路、通榆河围成的区域内,高楼林立。总体上,大部分建筑物高度在60 m以内,部分建筑高度超过80 m,但低于100 m。

2 技术路线
通过无人机进行航空倾斜摄影获得影像数据,进行空中三角测量,以此为基础,按照国家和行业标准规范制作三维实景建模成果[1]。
2.1 倾斜影像采集
2.1.1 倾斜影像采集准备
本次采用了一架大疆M300 RTK多旋翼无人机搭载一套赛尔PSDK 102S倾斜数码航摄仪执行本次项目的航空摄影任务。根据县城实际情况,对响水县城区域分区后进行航线设计,主要确定航摄仪技术参数、地面分辨率、测区内平均高程、重叠度等。
1)地面分辨率及相对航高。
数码航空摄影的地面分辨率(GSD)取决于飞行高度,按照下列公式求得相应GSD的飞行高度[2-5]:
其中,h为相对航高;f为下视镜头焦距;a为像元尺寸;GSD为地面分辨率。
2)航线布设方向。
根据分块测区的范围形状,进行航线方向设计。
3)航摄范围覆盖。
为了保证测区边界三维建模,旁向范围和航向范围的设计均超出测区边界距离不小于一个行高距离。
4)像片重叠度。
为保证建模质量,本次采用航向重叠度85%,旁向重叠度75%的像片重叠度进行数据采集[6-9]。
2.1.2 倾斜影像数据采集
在航线设计完成后,对测区进行倾斜摄影数据采集工作。数据采集完成后进行航摄数据整理工作,本次使用赛尔航测管家软件进行影像数据、POS数据等航摄数据下载。
2.2 三维倾斜模型制作
2.2.1 三维建模工程创建
基于外业采集的倾斜模型数据,导入ContextCapture软件中,进行模型建设工程创建。
1)数据准备与处理。
数据准备工作主要包括影像预处理、作业范围确认、相机参数确认、POS数据整理等[10]。
2)创建工程。
根据分区范围及预处理后的影像、POS成果创建工程。数据导入后,需要对影像组进行检查,确保影像无丢失。
2.2.2 空中三角测量
倾斜影像空中三角测量是指解算相机参数、影像位置和姿态,以及加密点三维坐标的过程。基于ContextCapture软件进行空中三角测量的具体步骤如下:
1)空三提交。
在进行像片检查合格后,空三加密计算提交工作。
2)影像自动匹配。
提交空中三角测量之后,软件自动进行影像匹配和空三结果输出。对于影像自动匹配的结果,可以通过相应的窗口进行检查。
3)空三解算。
软件自动进行空三解算。
2.2.3 模型建设
在空中三角测量的基础上,进行模型建设。
1)模型参数设置。
根据模型建设需要设置相关模型参数。
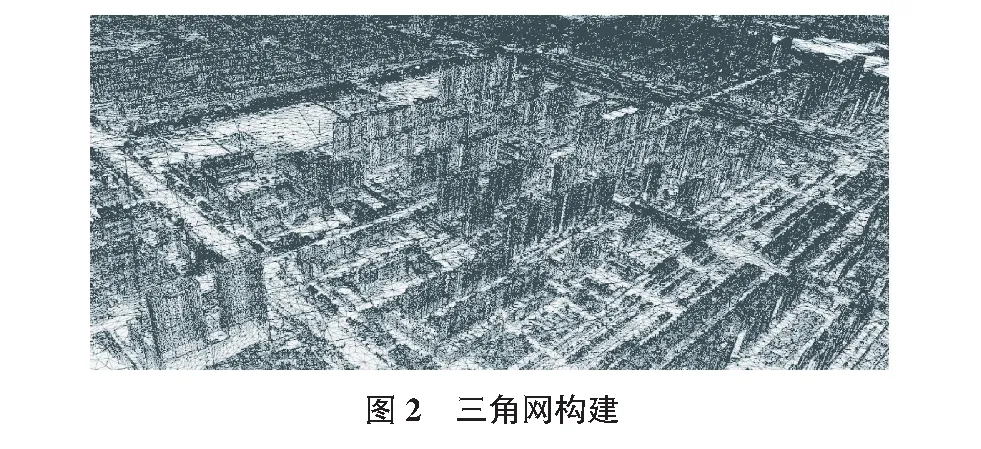
2)三角网构建。
基于空三加密成果进行多视影像密集匹配,获取高密度的三维点云,构建三维TIN[11]。由于项目密集点云量较大,将项目切块分割成若干瓦片进行不同层次细节度下的TIN模型构建,瓦片的大小设置为100 m×100 m。模型提交后,软件自动进行密集匹配工作,并进行三角网建设(如图2所示)。
3)纹理映射。
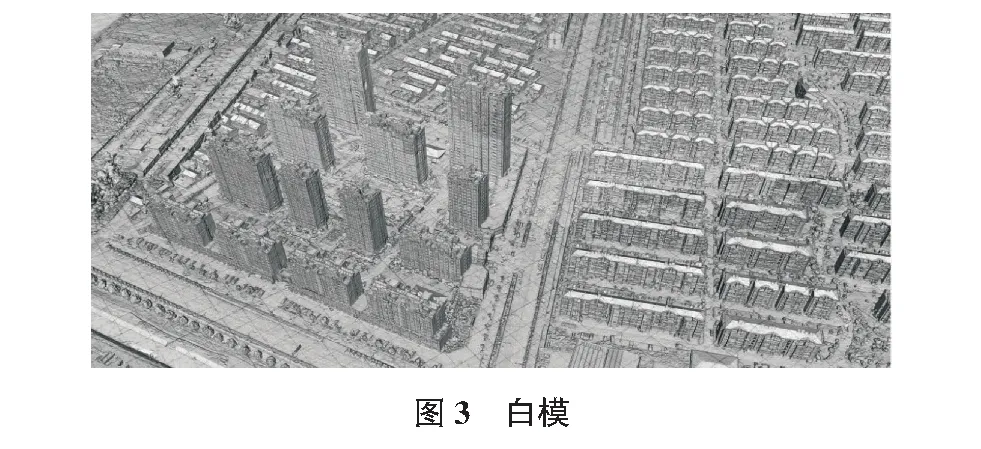
三维模型纹理映射包括三维模型与纹理图像的配准和纹理贴附。软件自行计算三维模型的每个三角形与影像中对应区域之间的几何关系,并找到每个三角形面在纹理影像中对应的实际纹理区域,实现三维模型与纹理图像的配准。配准的纹理图像反投影到对应的三角面片上,实现纹理贴附。软件利用影像密集匹配的结果,由空三建立的影像之间的三角关系构成三角网,再由三角网构成白模(如图3所示)[12]。
软件从影像中计算对应的纹理,并自动将纹理映射到对应的白模上,最终形成真实三维场景(见图4)[13]。

4)模型输出。
本次输出倾斜模型为OSGB格式。
2.3 模型修正
在进行城市实景三维建模过程中,由于地物本身的纹理、运动状态以及数据采集设备、建模软件等因素。模型中会出现水面的空洞、建筑物的拉花、建筑粘连以及道路不整洁等现象。因此,在进行模型建模后,利用DP Modeler软件对悬浮物、漏洞、道路等进行了模型修正工作[14-16]。
2.3.1 碎片、悬浮物删除
在软件Obj修饰模块中,选择需要碎片删除的Tile,点击碎片删除按钮,设置平面类型后删除平面以下的碎片;选择需要悬浮物删除的Tile,点击选取悬浮物,对自动选择的悬浮物进行删除。
2.3.2 漏洞修补
漏洞修补主要针对水面破洞和建筑玻璃幕墙空洞问题。本次采用软件的水面修补工具,进行水面破洞、水面不平整、水面纹理等修复工作。建筑破洞修复工作将使用几何修正中的融合处理方式进行处理。
2.3.3 道路修饰
针对主要道路面的扭曲、漏洞、车辆变形、零散飘浮碎片以及桥梁隧道下变形等问题,项目进行了道路修饰工作。利用DP Modeler软件采用高程值拟合的方式,在模型上选取三个以上分布均匀的点,进行道路局部的整平操作,保证道路的连续性;对静止的车辆压平保留;对移动的车辆产生的拖影等问题,进行了纹理编辑处理。
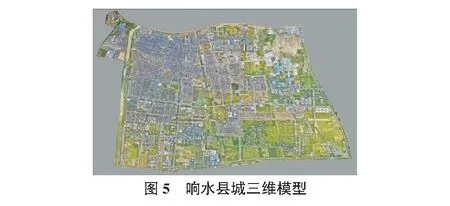
2.4 实景三维模型提交
在模型修正完成后,提供OSGB格式的实景三维模型数据(如图5所示)。该数据为后期配合房屋安全管理提供三维场景基础数据。
3 实景三维应用
3.1 基于实景三维模型的房屋建筑内业判读
通过已建成的实景三维模型,可避免因房屋无人在家、视角遮挡等不利排查工作进行的客观因素,做到内业足不出户进行初步的排查工作,对房屋的位置坐标、房屋结构、房屋的层次、房屋危险程度、房屋是否改变用途等实现实景排查,大大提高了数据采集的效率与准确度(如图6所示)。

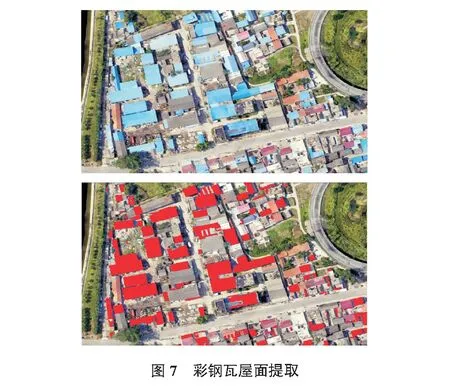
3.2 基于人工智能的影像彩钢瓦房自动识别与提取
通过已建成的实景三维模型,进行数字正射影像的制作。然后基于影像识别技术根据彩钢瓦房屋面的特征,实现了对彩钢瓦房屋面的快速批量提取(见图7),可以节约大量的排查人力物力。
3.3 基于实景三维模型动态管理
通过已建成的实景三维模型,可进行动态管理,将属性信息与三维模型相结合,掌握建筑物历史变迁、权属变更等重要信息。
4 结论
1)对大范围区域采用分区航摄的方式进行倾斜数据采集。对于范围较大城市测区、区域差别较大等区域,采用分区航摄的方法,可以解决遥控器控制范围有限、高楼遮挡链接信号、数据采集系统存储量有限等问题。
2)实景三维节约房屋安全管理成本、提高管理效率。基于实景三维的房屋安全管理,可节约大量的人力物力,避免视角遮挡、无法进入等不利于管理的客观因素,结合相关属性信息为房屋安全管理工作信息化、动态化、常态化提供数据支持,将安全管理工作以新技术手段和新管理方式落到实处、取得实效。
3)实景三维为智慧城市建设提供基础数据。实景三维的可视性、现势性为智慧城市建设、城市安全管理、政府规划设计等提供了有力的数据支撑。
