纸箱封装机折页机构的设计与研究
2022-09-21王潇高铭洋汤一凡张志强
王潇,高铭洋,汤一凡,张志强
纸箱封装机折页机构的设计与研究
王潇1,高铭洋2,汤一凡3,张志强1
(1.北京信息科技大学 机电工程学院,北京 100096;2.纽约大学工学院,纽约 11201;3.北京英博国际管理咨询有限公司,北京 100000)
为解决现有的纸箱自动化包装生产线上纸箱封装机的折页机构折侧页不可靠、无法对多规格的纸箱进行折页的问题,设计一种可靠、适用于多规格的纸箱折页机构以提高纸箱包装质量和包装效率。通过对折页功能、纸箱状态和封装机整体进行分析研究,设计2组纸箱折页机构;用机构的动态静力分析方法对2组折页机构进行运动学分析和动力学分析,用Matlab对运动学方程和动力学方程求解;用SolidWorks软件对2组折页机构进行结构设计和三维建模;将所设计的2组折页机构实物组装在封装机上进行现场试验。运动学分析结果表明,2组折页机构带动纸箱页旋转的最终角位移能够准确地使纸箱页完成折叠工作;动力学分析结果表明,2组折页机构所需的驱动力矩和驱动力符合动力元件的力矩和力的使用范围。现场试验结果表明,所设计的折页机构能够对多种规格的纸箱实现可靠的折页工作。该纸箱折页机构能够可靠地完成不同规格的纸箱折页工作,实现了纸箱折页的自动化与柔性化,可在一定程度上提高纸箱包装生产线的包装效率。
封装机;折页机构;运动学分析;动力学分析;结构设计
在消费与日俱增的今天,用户对包装纸箱的质量、功能、印刷内容精良等要求逐步上升,因此纸箱包装行业面临着越来越激烈的市场竞争力,各大企业进行生产改革,推动纸箱生产向自动化、智能化方向转变[1]。目前大多数中小型企业的纸箱封装工作多采用人工进行纸箱折页,存在工作效率低、包装质量参差不齐的问题,而市面上的自动封箱机器大都占地空间大、价格昂贵、操作复杂[2-5],不适合中小型企业。对此,国内的一些学者对纸箱封装机做了一定的研究并取得了一些重大突破[6-9],但仍然存在封装机的折页机构折侧页不可靠、无法对多规格的纸箱进行折页的问题。
正对上述问题,文中提出一种应用在纸箱包装生产线上纸箱封装环节的适用于多规格的纸箱自动折页机构,设计了两组折页机构负责对纸箱4个侧页进行折叠。文中首先利用凸轮机构和滑块机构对这2组折页机构进行设计;然后对这2组折页机构进行运动学和动力学分析,并用Matlab对运动学方程和动力学方程进行求解,求解结果表明所设计的折页机构能够有效地实现纸箱侧页的自动折页工作;然后根据纸箱封装机整体结构对所设计的纸箱折页机构进行结构设计,并用SolidWorks进行三维建模;最后将所设计的折页机构组装在纸箱封装机上进行现场试验,实验结果表明所设计的纸箱自动折页机构能够可靠地对多种规格的纸箱完成折叠工作。
1 折页机构的设计
纸箱包装生产线上的纸箱包装流程为开箱—装料—封装—贴胶—入库,文中主要对封装环节中的折页机构进行设计和研究。完成装料后的纸箱状态见图1,此时纸箱8个页均处于展开状态。纸箱进入封装机后开始进行折叠工作。由于封箱机结构空间的限制,推动折页拨叉2的双轴气缸无法正对着纸箱页进行安装,只能安装在纸箱页的外侧。鉴于此,所设计的折页拨叉2结构简图见图3。如图3纸箱折页机构运动简图所示,折页拨叉1与纸箱页1组成折页机构1,折页拨叉1与旋转气缸(图3中未示出)固定,旋转气缸固定在机架上,折页拨叉1可在旋转气缸的带动下旋转进而推动纸箱页1旋转,旋转气缸旋转90°时纸箱页1完成折叠动作;折页拨叉2与纸箱页2组成折页机构2,折页拨叉2与双轴气缸(图3中未示出)固定,双轴气缸推动折页拨叉2进行直线运动,折页拨叉2在运动的过程中推动纸箱页2旋转,直至将纸箱页2推动至折叠状态为止。折页机构1和折页机构2对称布置在纸箱两侧对纸箱进行折页工作,图中实线部分为折叠过程中的状态,虚线部分为折叠完成的状态。
纸箱的折叠的顺序:纸箱两侧对称布置的折页拨叉2在双轴气缸的推动下将纸箱两侧的纸箱页2进行折叠,折叠完成后纸箱两侧的折页拨叉2可压紧纸箱使其固定住;折页拨叉1在旋转气缸的带动下将纸箱两侧的纸箱页1进行折叠;再由纸箱封装机上原有的折上下页机构将纸箱两侧的上下页进行折叠。折叠后的纸箱状态如图2所示,即8个页均处于折叠状态。
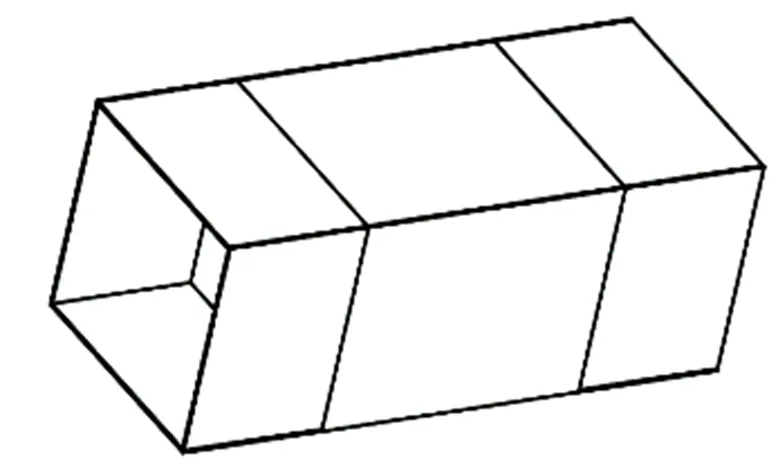
图1 纸箱折叠前状态
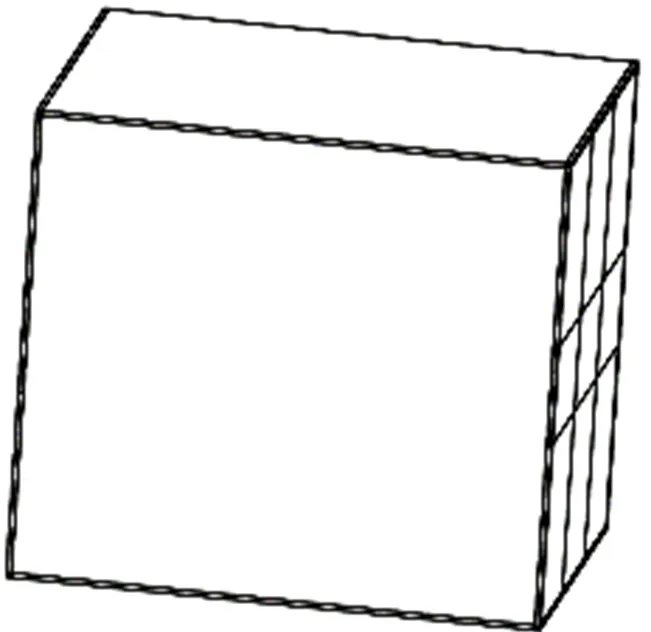
图2 纸箱折叠后状态
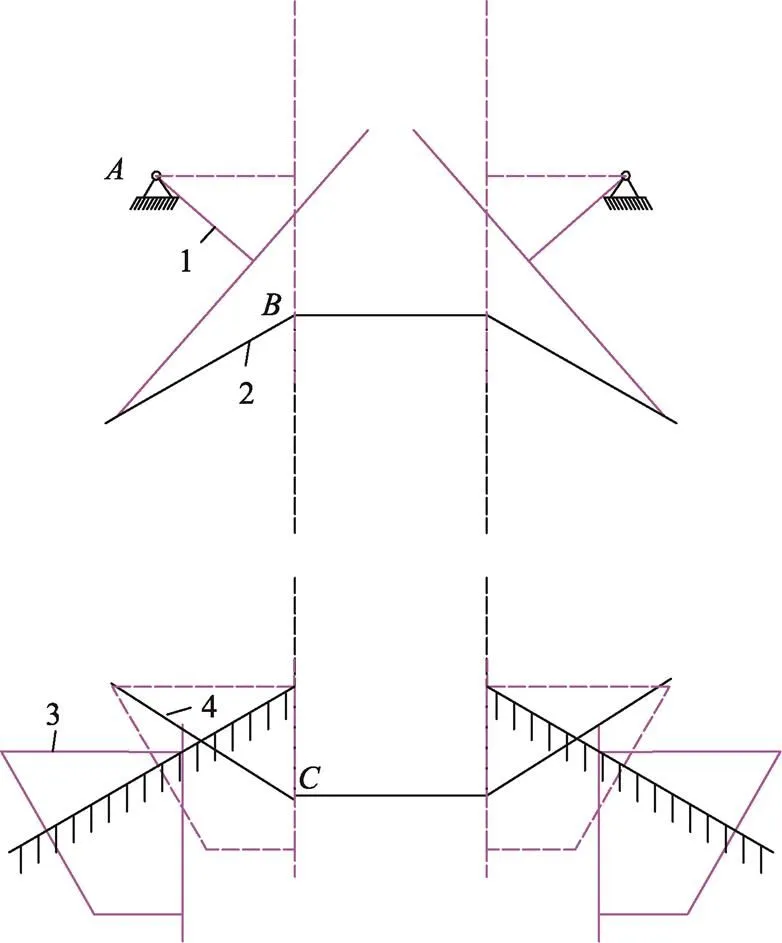
1. 折页拨叉1 2. 纸箱页1 3. 折页拨叉2 4. 纸箱页2
折页机构1有两个活动构件(部件1;部件2),2个转动副(A、B),1个高副(部件1和部件2之间),该组合机构的自由度[10]为:

处固定的旋转气缸带动部件1(折页拨叉1)转动,部件1在转动的过程中推动部件2(纸箱页1)转动,部件2在部件1的推动下绕中心点旋转,当纸箱页旋转至图中虚线部分所示位置时完成纸箱的折页工作。
折页机构2有2个活动构件(部件3、部件4),1个移动副(部件3和基座之间),1个转动副(C),1个高副(部件3和部件4之间)。该组合机构的自由度为:
双轴气缸驱动与之固连的部件3(折页拨叉2)沿气缸轴移动,部件3移动的过程中推动部件4(纸箱页2)绕固定点旋转,当部件4旋转至图3中虚线所示位置时完成纸箱的折页工作。
2 折页机构运动学和动力学分析
2.1 折页机构1运动学和动力学分析
如图4所示,将折页机构1的运动类比为一对摆动从动杆平面凸轮机构的运动[11-12],将部件1(折页拨叉1)类比为绕中心点旋转的凸轮,将部件2(纸箱页1)类比为由部件1带动的摆杆,部件1上的点为部件1与部件2的接触点。以点为坐标原点建立坐标系。分析时将部件1固定不动,将部件2(摆杆)绕点按照凸轮的旋转规律进行旋转。部件2(摆杆)末端(、、点)的坐标为:
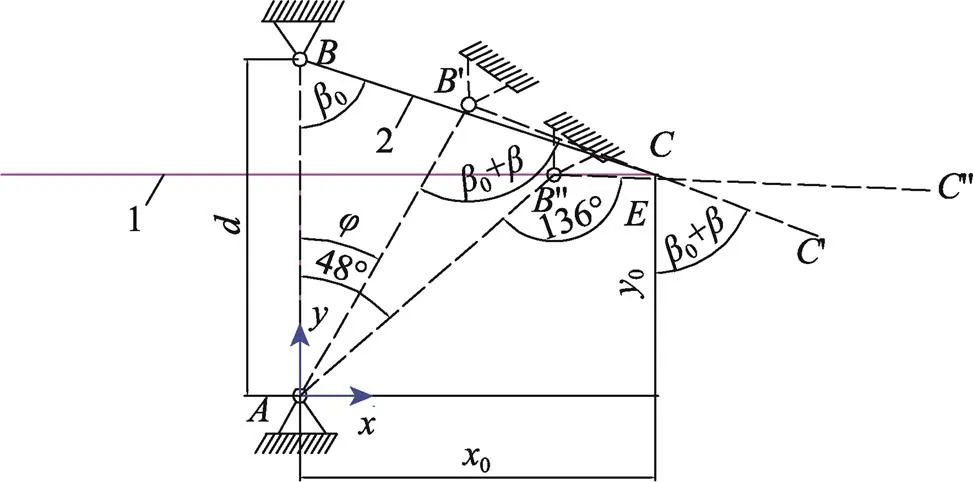
图4 折页机构1运动简图


式中:为凸轮的运动规律;为摆杆的长度(即、、之间的距离);为部件2(摆杆)的运动规律。
点坐标又可写为:


式中: l为随着机构的运动摆杆末端点与部件1上的点之间的长度。
联立方程(1)—(4)得:


对方(5)—(6)两边求导得:


对方程(7)—(8)两边再次求导得:


折页机构1运动的速度较高,根据达朗贝尔原理,在对折页机构进行动力学分析时应将惯性力计入平衡方程中,即对机构进行动态静力分析[13-14]。由于纸箱和用钣金件设计的折页拨叉质量较轻,因此在进行动力学分析时可忽略不计。对折页机构1进行受力分析,见图5。
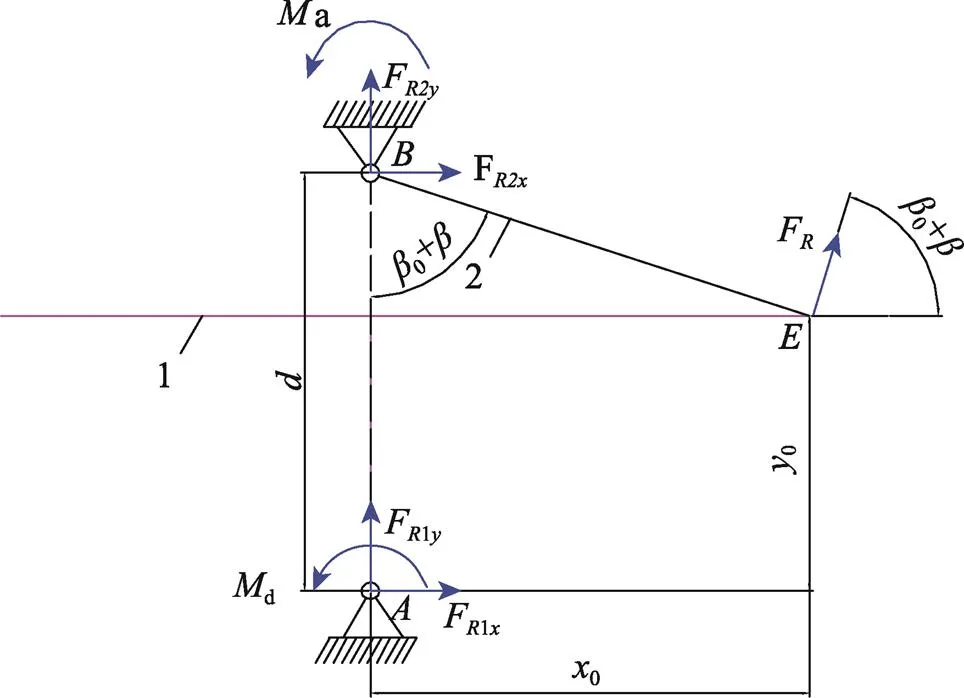
图5 折页机构1受力分析
折页机构1的力平衡方程如下:
对主动凸轮(部件1)



对从动件(部件2)



根据设计值,=144.5 mm、=160 mm、0=152 mm、0=95 mm0=71°,将主动件的运动简化为匀速运动,运动规律为:

用Matlab对折页机构1中的部件2(纸箱页1)的摆动角位移、角速度、角加速度进行运动学仿真,仿真结果见图7。由图6可知,初始状态时纸箱页1与竖直方向的夹角为70°,当折页拨叉1旋转48°左右后带动纸箱页1旋转至与竖直方向夹角为136°,此时即β0+β=70°+66°=136°的位置。由图7的仿真结果可知,部件2(纸箱页1)最终的摆动角位移为66°左右,则β0+β=70°+66°=136°,由此说明部件2(纸箱页1)最终的摆动角位移符合纸箱页折叠完成时的位置。此外,部件2(纸箱页1)的角速度和角加速度变化平缓无突变,说明纸箱页在由旋转气缸带动的折边拨叉1的带动下能稳定地完成折页动作。
用Matlab对折页机构1上需要施加在主动件上的驱动力矩M和主动件与从动件之间的铰约束力F进行动力学仿真,仿真结果如图8所示,由图8可以看出,折页机构1的驱动力矩在折页机构1运动初期稳定基本无变化,当折页机构1运动至接近终点时驱动力矩逐渐增加,折页机构1的主动件与从动件之间的铰约束力变化规律与驱动力矩的变化规律类似。折页机构1选用的旋转气缸是缸径为25 mm的90度旋转气缸,查询此型号气缸的容许惯性扭矩并计算最大驱动力矩约为1 200 N·m,由图7可以看出折页机构1完成纸箱折页功能所需要的驱动力矩小于旋转气缸的最大驱动力矩,因此此型号的旋转气缸可以驱动折页机构1完成纸箱折页动作。

图7 折页机构1运动特性曲线
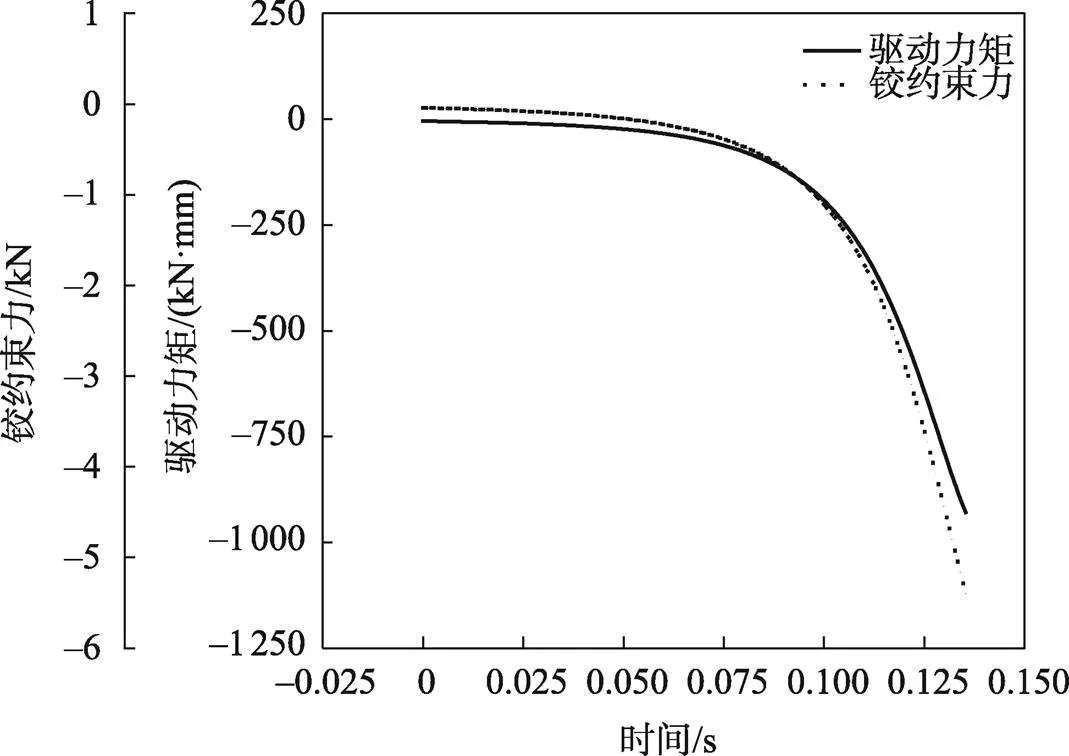
图8 折页机构1动力特性曲线
2.2 折页机构2运动学和动力学分析
如图9所示,以点为原点建立平面直角坐标系,规定所有运动角度均以顺时针方向为正方向。利用矢量方程解析法[15]建立折页机构2的位移、速度、加速度方程。
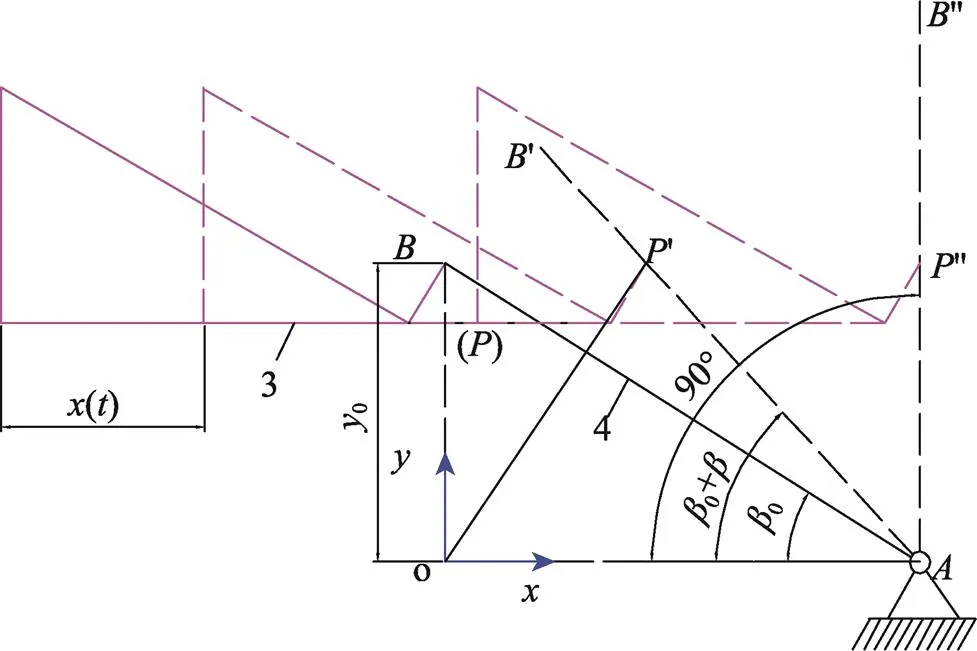
图9 折页机构2运动简图
设固定点为原点,由矢量三角形可得点方程为:


点在部件3(折页拨叉2)上随着部件3移动,假设部件3向右匀速运动,运动规律为:
点的方程又可写为:

联立方程(18)—(22)得:


联立方程(23)—(24)可求得纸箱页2角位移运动规律。
对方程(23)—(24)两边求导得:

对方程(25)—(26)两边再求导得:

对折页机构2进行受力分析,见图10。
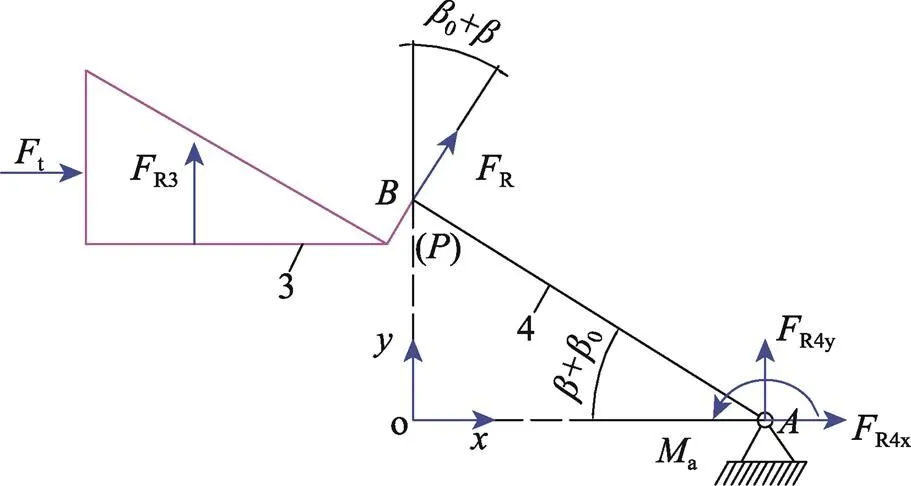
图10 折页机构2受力分析
折页机构2的力平衡方程如下。
对主动件(部件3)


对从动件(部件4)



根据设计值,l=135 mm、0=32°、0=0、0= 85.4 mm,将主动件简化为匀速运动,运动规律为:
用Matlab对折页机构2的从动件(纸箱页2)的摆动角位移、角速度、角加速度进行运动学分析,分析结果如图11所示。由图11可以看出,部件4(纸箱页2)最终的摆动角位移为58°左右,则0+=90°。通过对图8的分析可知,当0=90°时,纸箱页旋转90度完成折叠,由此得出折页机构2的部件4(纸箱页2)最终摆动角位移符合纸箱页折叠完成时的位置。此外,部件4(纸箱页2)的角速度持续增长,角加速度先增加后减小且变化平缓无突变,说明纸箱页2在由双轴气缸带动的折边拨叉的带动下能稳定地完成折页动作。
用Matlab对折页机构2上需要施加在主动件上的驱动力t和主动件与从动件之间的铰约束力R进行动力学仿真,仿真结果如图12所示,由图12可以看出,折页机构2的驱动力在折页机构2运动过程中先增加后减小,折页机构2的主动件与从动件之间的铰约束力变化规律与驱动力矩的变化规律相反,即先减小后增加,且变化平稳无突变。折页机构2选用的双轴气缸为缸径为25 mm的气缸,查询此型号气缸的最大输出力最大为9.6×104N,远远大于折页所需要的驱动力,因此此型号的双轴气缸可以驱动折页机构2完成纸箱折页工作。
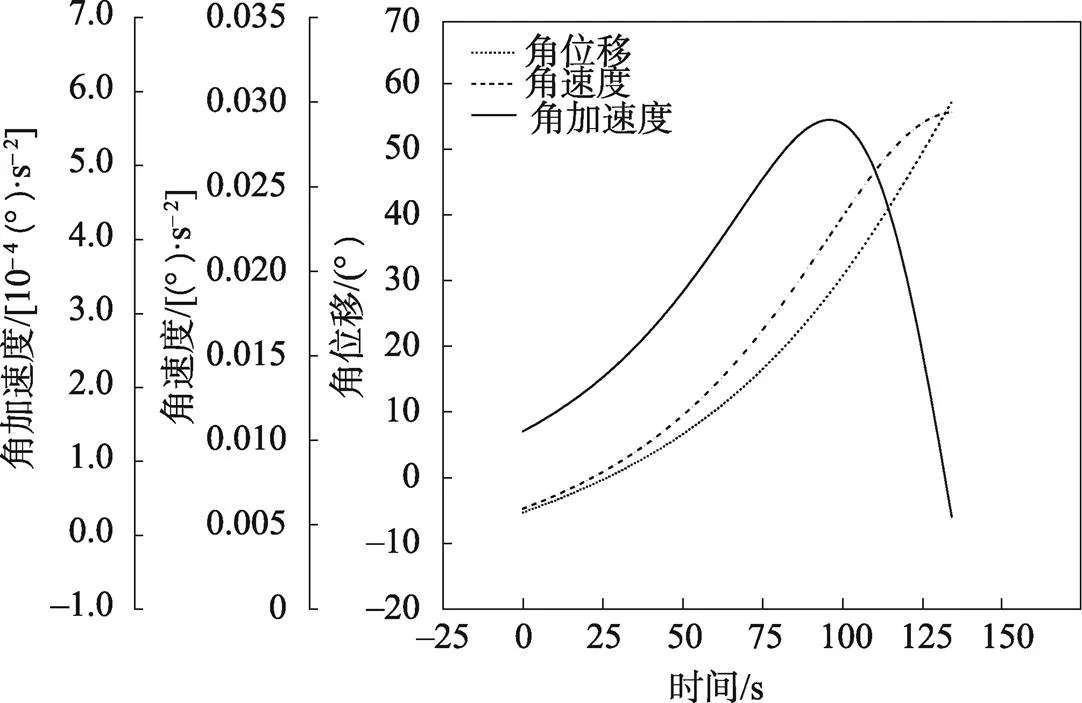
图11 折页机构2运动特性曲线
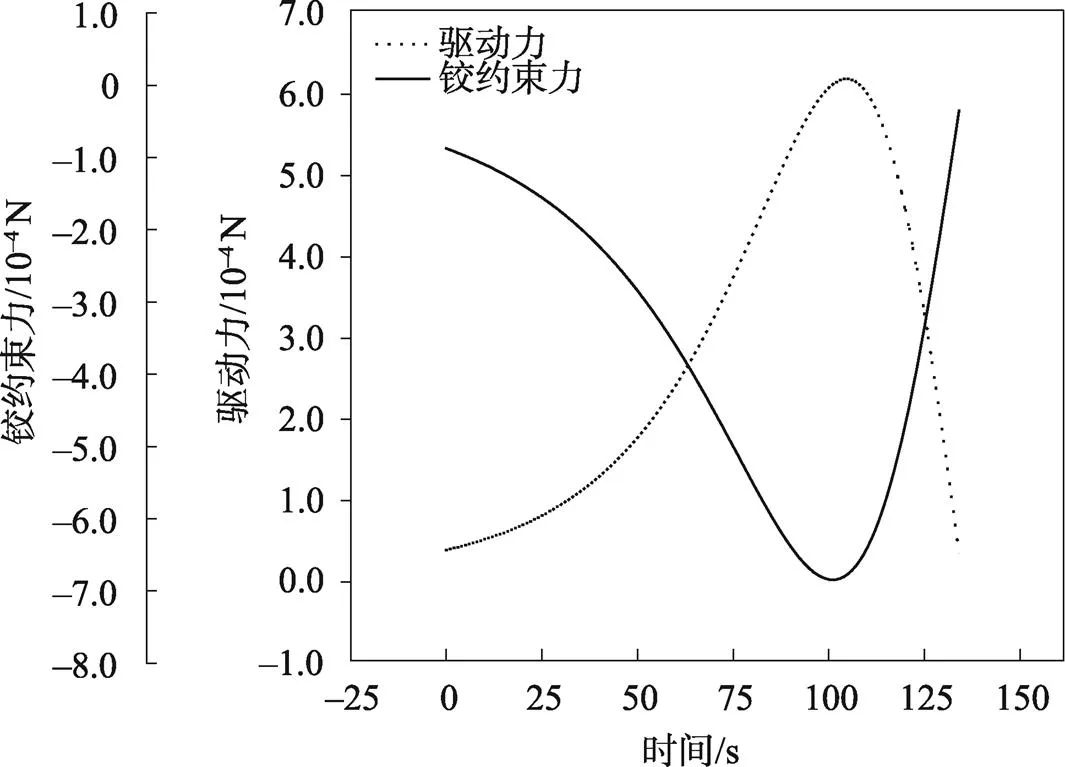
图12 折页机构2动力特性曲线
3 折页机构结构设计与三维建模
3.1 封装机整体结构介绍
根据以上对折页机构的动力学分析,所设计的折页机构满足纸箱折页要求。现对折页机构进行样机设计。如图13所示为封箱机的整体结构。由折页机构1、折页机构2、折页机构3、推送机构、导向机构组成。折页机构1、折页机构2和折页机构3对称布置在纸箱两侧对纸箱的8个侧页进行折叠。折页机构1和折页机构2对纸箱的4个侧页进行折叠;折页机构3对纸箱的上下页进行折叠;推送机构由无杆气缸带动可将完成折页的纸箱推至下一个工位处;导向机构对折叠完成的机构进行整形、压紧、导向,防止折叠完成的纸箱页松开。
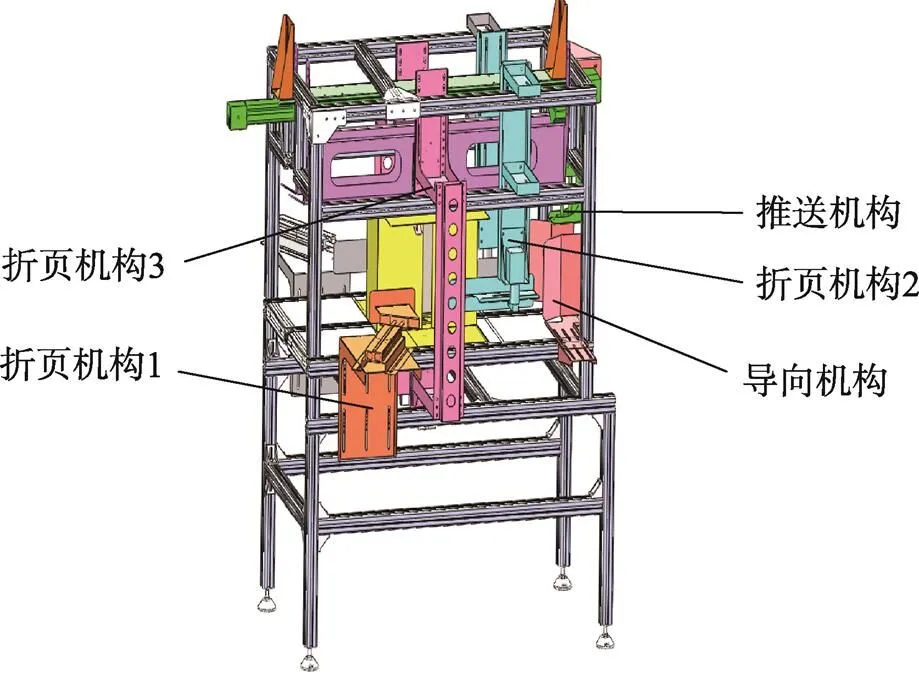
图13 纸箱封装机整体结构
3.2 折页机构设计与建模
折页机构1需满足的功能为:折页机构1需在旋转气缸的带动下旋转90°时能正好推动纸箱页旋转至纸箱页完成折叠的角度;折页机构1需在纸箱页完成折叠后能将纸箱页压紧实现对纸箱进行整形的效果;折页机构1需在封箱机机架上能够调节位置以便对不同规格的纸箱进行折叠。折页机构2需满足的功能为:折页机构2需在双轴气缸的驱动下推动纸箱页使其旋转至完成折叠的角度;折页机构2需在纸箱页完成折叠后将纸箱压紧实现对纸箱进行暂时固定的作用,防止接下来折页机构1对纸箱进行折叠时纸箱移动;折页机构2需在封箱机机架上能够调节以适应不同规格的纸箱折页功能。根据2组折页机构需满足的功能要求,用SolisWorks对折页机构1和折页机构2的每个零部件进行结构设计。由于钣金件具有质量小、强度高、导电、成本低、大规模量产性能好等优点,因此折页拨叉1、折页拨叉2以及折页机构与封装机机架的连接件均用钣金设计。
如图13所示为设计的折页机构1三维模型,折页拨叉1设计成T字形结构,此结构可使折页拨叉1一端与旋转气缸固连,一端对纸箱页进行折叠,并在折叠后对纸箱页进行压紧。设计的连接件1将旋转气缸与连接件2连接起来,连接件2上设计了长腰孔与连接件3连接,连接件3上上设计长腰孔与封装机机架连接,通过连接件2和连接件3上的长腰孔可以调节折页机构1在封装机机架上的位置,通过调节折页机构1在封装机机架上的位置来适应不同规格的纸箱折页工作。
图14所示为设计的折页机构2三维模型,折页拨叉2设计成如图所示结构,此结构可使双轴气缸以一定倾斜角度向前推动时折页拨叉仍能从纸箱页的法方向对纸箱页进行推动、压紧。连接件2按照双轴气缸的尺寸进行设计,将双轴气缸固定在连接件1上。连接件1将折页机构2整体固定在封装机机架上。连接件1和连接件2上均设计了长腰孔,通过长腰孔可以调节折页机构2在封装机机架上的位置,以此来适应不同规格的纸箱折页工作。
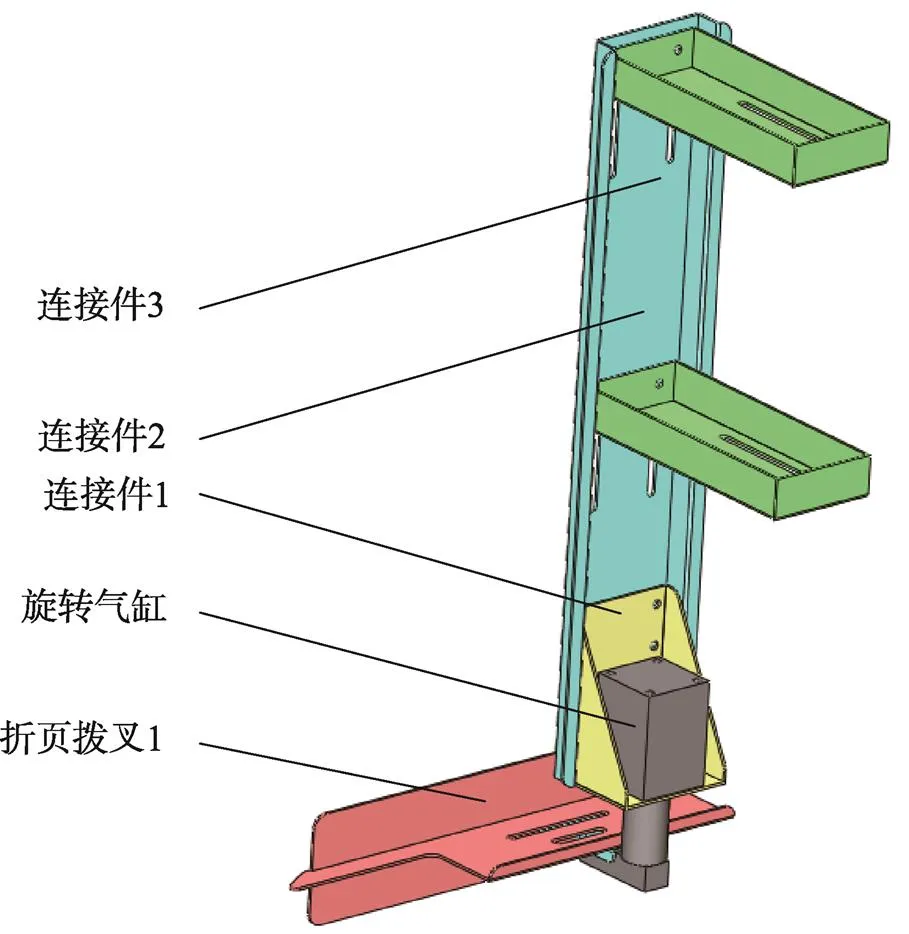
图14 折页机构1三维模型
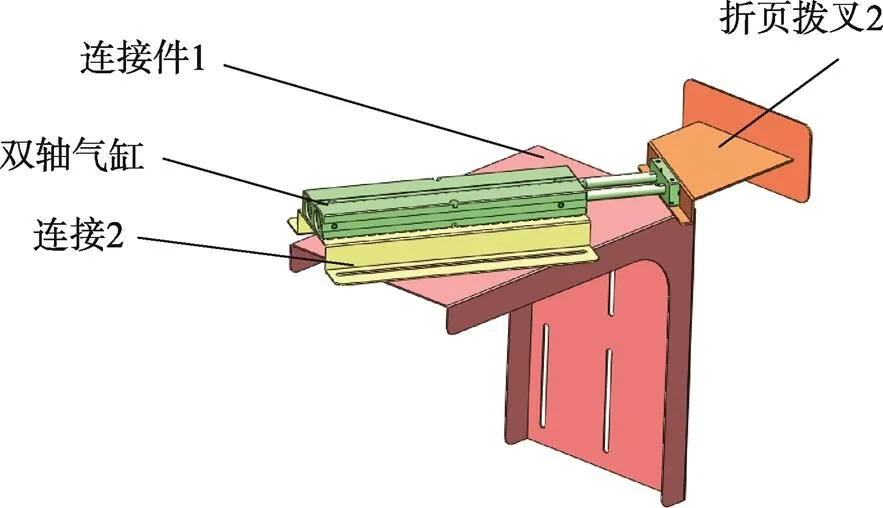
图15 折页机构2三维模型
4 现场试验
按照所设计的尺寸和形状加工出折页机构的折页拨叉和各个连接件,替换掉原来的折页机构,将所设计的折页机构实物组装在纸箱封装机上,旋转气缸选用的是亚德客32×90型号的气缸,气压为0.7 MPa,旋转角度为90°,容许的惯性扭矩低于8×10−4kg·m2。双轴气缸选用的是缸径25 mm,行程150 mm的气缸,控制系统用PLC进行控制。用355 mm×197 mm×181 mm的纸箱进行实验,纸箱折叠前由推送机构将纸箱推送至折页机构处,如图15所示。折页机构1和折页机构2在PLC的控制下依次对纸箱两侧页进行折叠,折叠效果如图16所示。再选用几种(180~355) mm×(230~400) mm×(95~210)mm规格的纸箱进行经过多次实验,结果均表明所设计的折页机构可以高效、可靠地完成不同规格的纸箱折页工作。

图16 实际折页效果
5 结语
为解决现有的纸箱自动化包装生产线上的纸箱封装机上的折页机构折侧页不可靠、无法实现对多种规格的纸箱进行折页的问题,设计了一种可靠、适用于多规格的纸箱折页机构,提高了纸箱包装质量和包装效率。
1)通过对纸箱折页功能要求、封箱机整体结构和未折叠纸箱状态进行分析研究,利用凸轮机构和滑块机构设计了应用在纸箱封装机上的两组纸箱折页机构。
2)用机构的动态静力分析方法对这2组折页机构进行运动学分析和动力学分析,分析结果表明,2组折页机构能够准确地使纸箱页完成折叠工作。
3)对折页机构的功能要求和封装机整体结构进行分析,用SolidWorks软件对2组折页机构进行具体的结构设计和三维建模,通过结构设计实现对多种规格纸箱进行折页。
4)将所设计的2组折页机构实物组装在封箱机上进行现场试验,实验平台的有效工作空间为355 mm×400 mm×210 mm。现场试验结果表明,所设计的纸箱折页机构能够对多种规格的纸箱实现可靠、高效的折页工作,并且具有结构简单、造价低的特点,为纸箱折页机构的设计提供一定的参考价值。
[1] 戴宏民, 戴佩燕. 工业4.0和包装机械智能化[J]. 中国包装, 2016, 36(3): 51-56.
DAI Hong-min, DAI Pei-yan. 4.0 Intelligent Industry and Packaging Machinery[J]. China Packaging, 2016, 36 (3): 51-56.
[2] PONS H. Machine for Gluing Folding Cartons for Producing Folding Cartons from Blanks: US, 6503181[P]. 2003-01-07.
[3] SOHRABPOUR V, OGHAZI P, OLSSON A. An Improved Supplier Driven Packaging Design and Development Method for Supply Chain Efficiency[J]. Packaging Technology and Science, 2016, 29(3): 161-173.
[4] BERETTA A, SEMERARO Q, CASTILLO D E. On the Multihead Weigher Machine Setup Problem[J]. Packaging Technology and Science, 2016, 29(3): 175-188.
[5] 李丽阁, 张有良, 段移丽, 等. 纸箱包装机纸板取送机构的设计与研究[J]. 包装与食品机械, 2014, 32(4): 28-30.
LI Li-ge, ZHANG You-liang, DUAN Yi-li, et al. Design and Research of the Sucking and Delivery Mechanism for the Carton Packing Machine[J]. Packaging and Food Machinery, 2014, 32(4): 28-30.
[6] 李美川. 连续式胶带封箱纸箱成型机的设计与研究[D]. 西安: 西安工业大学, 2014: 32.
LI Mei-chuan. Design and Research of Continuous Tape Sealing Carton Forming Machine[D]. Xi'an: Xi'an Technological University, 2014: 32.
[7] 侯志利, 武文革, 李瑞琴, 等. 可控连杆手指式纸箱封箱机的设计[J]. 包装工程, 2017, 38(3): 78-82.
HOU Zhi-li, WU Wen-ge, LI Rui-qin, et al. Design of Finger Type Carton Packaging Machine with Controllable Linkage Mechanism[J]. Packaging Engineering, 2017, 38(3): 78-82.
[8] 王丰元, 李兰, 李震, 等. 旋转式多工位自动干果包装机的设计[J]. 食品与机械, 2017, 33(1): 76-80.
WANG Feng-yuan, LI Lan, LI Zhen, et al. Design of Automatic Nut Packing Machine with Rotary Multi-Station[J]. Food & Machinery, 2017, 33(1): 76-80.
[9] 范华显, 董澎浩, 董文琪, 等. 自适应封箱机的设计与研究[J]. 机械传动, 2017, 41(10): 173-177.
FAN Hua-xian, DONG Peng-hao, DONG Wen-qi, et al. Study and Design of Adaptively Sealing Machine[J]. Journal of Mechanical Transmission, 2017, 41(10): 173-177.
[10] 潘银松. 机械原理[M]. 重庆: 重庆大学出版社, 2016: 20-30.
PAN Yin-song. Mechanical Principle[M]. Chongqing: Chongqing University Press, 2016: 20-30.
[11] 刘昌祺, 牧野洋, 曹西京. 凸轮机构设计[M]. 北京: 机械工业出版社, 2005: 6-32.
LIU Chang-qi, MU Ye-yang, CAO Xi-jing. Cam Mechanism Design[M]. Beijing: China Machine Press, 2005: 6-32.
YOUSUF L S., NABIL H H. Contact Stress Distribution of a Pear Cam Profile with Roller Follower Mechanism[J]. Chinese Journal of Mechanical Engineering, 2021, 34(1): 266-279.
[12] TO C W S. Introduction to Kinematics And Dynamics of Machinery[M]. Williston: Morgan & Claypool Publishers, 2017: 20-50.
[13] 张策. 机械动力学[M]. 2版. 北京: 高等教育出版社, 2008: 23-33.
ZHANG Ce. Machinery dynamics[M]. 2nd ed. Beijing: Higher Education Press, 2008: 23-33.
[14] 艾海明, MA Primin, 张清利. 基于点源矢量逆向求解方程解析方法[J]. 西南大学学报(自然科学版), 2020, 42(9): 87-94.
AI Hai-ming, PRIMIN M, ZHANG Qing-li. An Analytical Method for Inverse Solution Equation Based on Point Source Vector[J]. Journal of Southwest University (Natural Science), 2020, 42(9): 87-94.
Design and Research of Folding Mechanism for Carton Packaging Machine
WANG Xiao1, GAO Ming-yang2, TANG Yi-fan3, ZHANG Zhi-qiang1
(1. College of Mechanical & Electrical Engineering, Beijing Information Science and Technology University, Beijing 100096, China; 2. Polytechnic Institute of New York University, New York 11201, USA; 3. Beijing Yingbo International Management Consulting, Beijing 100000, China)
The work aims to design a reliable and suitable carton folding of multiple specifications to solve the problem that the folding mechanism of the carton packaging machine on the existing carton automatic packaging production line is unreliable and cannot fold the carton of multiple specifications, so as to improve the quality and efficiency of carton packaging. By analyzing and researching the folding function, carton status and the packaging machine as a whole, two carton folding mechanisms were designed; the dynamic static analysis method of the mechanism was used. Matlab was used to solve the kinematics and dynamics equations; SolidWorks software was used to carry out structural design and three-dimensional modeling of the two folding mechanisms. The two folding mechanisms designed were assembled on the packaging machine for on-site testing. The kinematic analysis results showed that the final angular displacements of the two folding mechanisms driving the carton page rotation can accurately make the carton pages complete the folding work; the dynamic analysis results showed that the driving torque and driving force required by the two folding mechanisms conformed to the use range of torque and force of power components. Field test results showed that the designed folding mechanism could achieve reliable folding of cartons of various specifications. The carton folding mechanism can reliably complete carton folding of different specifications and realize the automation and flexibility of carton folding, and can improve the packaging efficiency of the carton packaging production line to a certain extent.
packaging machine; folding mechanism; kinematic analysis; dynamic analysis; structural design
TH112
A
1001-3563(2022)17-0140-09
10.19554/j.cnki.1001-3563.2022.17.018
2021–11–09
北京市教委科研计划科技一般项目(KM202011232011)
王潇(1997—),女,硕士生,主攻机器人技术及应用。
张志强(1964—),男,博士,教授,主要研究方向为机器人技术及应用。
责任编辑:曾钰婵
