复杂环境下GF-2影像水体指数的构建及验证
2022-09-20王春霞李屹旭Phoumilay
王春霞, 张 俊, 李屹旭, Phoumilay
(1.贵州大学矿业学院,贵阳 550000; 2.贵州大学农学院,贵阳 550000)
0 引言
地表和地下水储量是水资源管理和陆地水循环研究的重要参数,与人类的生产和生活息息相关。其次水是重要的自然资源,在国家管理,规划发展、灾害评估、水利、灌溉等方面有着重要的作用[1]。
近年来,基于遥感影像的水体提取方法众多,包括基于深度学习的方法[2-4]、基于分类器的方法[5-8]和利用水体指数的方法[9-15]等。对于中低空间分辨率的光学遥感影像而言,由于波谱信息丰富,加上水体指数模型简单快捷的特点,故利用光谱信息构建水体指数提取水体信息依旧是研究的热点。
针对高空间分辨率遥感影像而言,影像波段数较少,大多只含有4个波段,故适用于高空间分辨率遥感影像的水体指数也较少。其中文献[16-19]利用水体指数在国产高分卫星影像上进行水体信息的提取研究; 文献[20-21]将GF-2影像进行多尺度分割,结合近红外波段设定阈值对水体信息进行提取; 文献[17]利用水体指数,同时结合改进的最大类间方差法(OSTU)结合鸡群算法 (chicken swarm optimization,CSO)快速自适应地确定最佳分割阈值, 进而得到最终的水体区域; 文献[22]利用水体指数和区域模糊C均值(fuzzy C-means,FCM)聚类算法的优点,提出一种整合水体指数和区域FCM的城市地表水体自动提取算法,该算法具有较高的水体提取精度,城市地表水体边界既具有较好的区域完整性又保持了局部细节,同时对城市地表水体复杂背景噪声具有较好的抑制作用,可有效减少传统FCM聚类算法的“椒盐”现象。综上所述,对于高空间分辨率遥感影像而言,通过构造水体指数提取水体信息的研究尚少,且研究成果表明,对于现有的水体指数模型而言,常常只考虑阴影及暗色地物等的影响,忽略了建筑物和亮色地物等地表覆盖的影响,故在进行水体提取时,常需要构造决策树对水体信息进行提取,需人为设定多个阈值,水体提取自动化程度低; 其次,由于地物复杂,波段数较少,“同谱异物”现象更为明显,在水体信息的提取时,“椒盐”现象也更为严重。为此综合考虑复杂地表覆盖的影响,分析各种地表覆盖与水体的波谱特征,选取了红光波段、绿光波段和近红外3个波段构建了综合水体指数(comprehensive water index,CWI),并通过实验进行验证,为了抑制“椒盐”现象,采用将影像进行分割,再结合CWI对水体信息进行提取的方法,以期有效抑制“椒盐”现象的出现,较好地提取河流、湖泊、池塘等水体。
1 研究区概况及数据源
研究区位于贵州省中南部,地理位置为E106°37′~106°41′,N26°5′~26°9′,北邻贵阳,西及安顺,属喀斯特盆地地貌。研究区内地物类型多样,存在大量易与水体混淆地物,如阴影、低反射物和高反射建筑物等。
遥感数据为2016年11月10日获取的L1A级GF-2产品PMS1,影像覆盖无云、成像质量好,包含了多光谱和全色2种数据类型。其中多光谱数据有4个波段,分别为蓝(B1)、绿(B2)、红(B3)和近红外(B4)波段,空间分辨率为4 m; 全色波段空间分辨率为1 m。数据的预处理包括辐射定标、大气校正、正射校正和图像融合过程,其中大气校正方法选择FLAASH大气校正,数据融合方法选择NNDiffuse Pan Sharpening数据融合,该数据融合方法要求多光谱影像空间分辨率为全色影像空间分辨率的4倍最佳,且响应函数重叠度较小。GF-2影像完全满足该要求,且该融合算法能够较好地保持数据的纹理、色彩和光谱信息,融合后影像空间分辨率为1 m。
2 水体提取方法
2.1 光谱特征分析
在研究区内,地表覆盖物复杂,有植被、裸土、建筑物、道路、水体和高大的建筑物阴影等。在影像上均匀选取各样本的纯净像元,统计各类样本在各个波段的均值并绘制光谱曲线,光谱曲线如图1所示。水体在近红外波段的反射率均值低于其他地物在近红外波段的反射率; 在可见光波段,水体的反射率普遍偏低,阴影和植被的反射率低于水体的反射率。其中在红光波段上,植被和阴影的反射率与水体的反射率差别较小; 在绿光波段和蓝光波段上,植被和阴影的反射率与水体的反射率差别较大。对于清洁水体而言,在可见光—近红外波段,随着波长的增加,反射率逐渐降低,但对于研究区内的水体而言,不再完全满足在可见光—近红外波段,随着波长的增加,反射率逐渐降低的特点,主要原因为水体的吸收与散射除了受水体自生的主导外,还受到水中的其他成分的影响,如当水中含有泥沙或叶绿素时,在其作用下,水体会呈现绿色或黄色甚至是黄棕色,此时的水体在相应的波段反射率将增加,故导致水体在各个波段的反射特点发生变化,不再满足清澈水体的反射特点[23]。
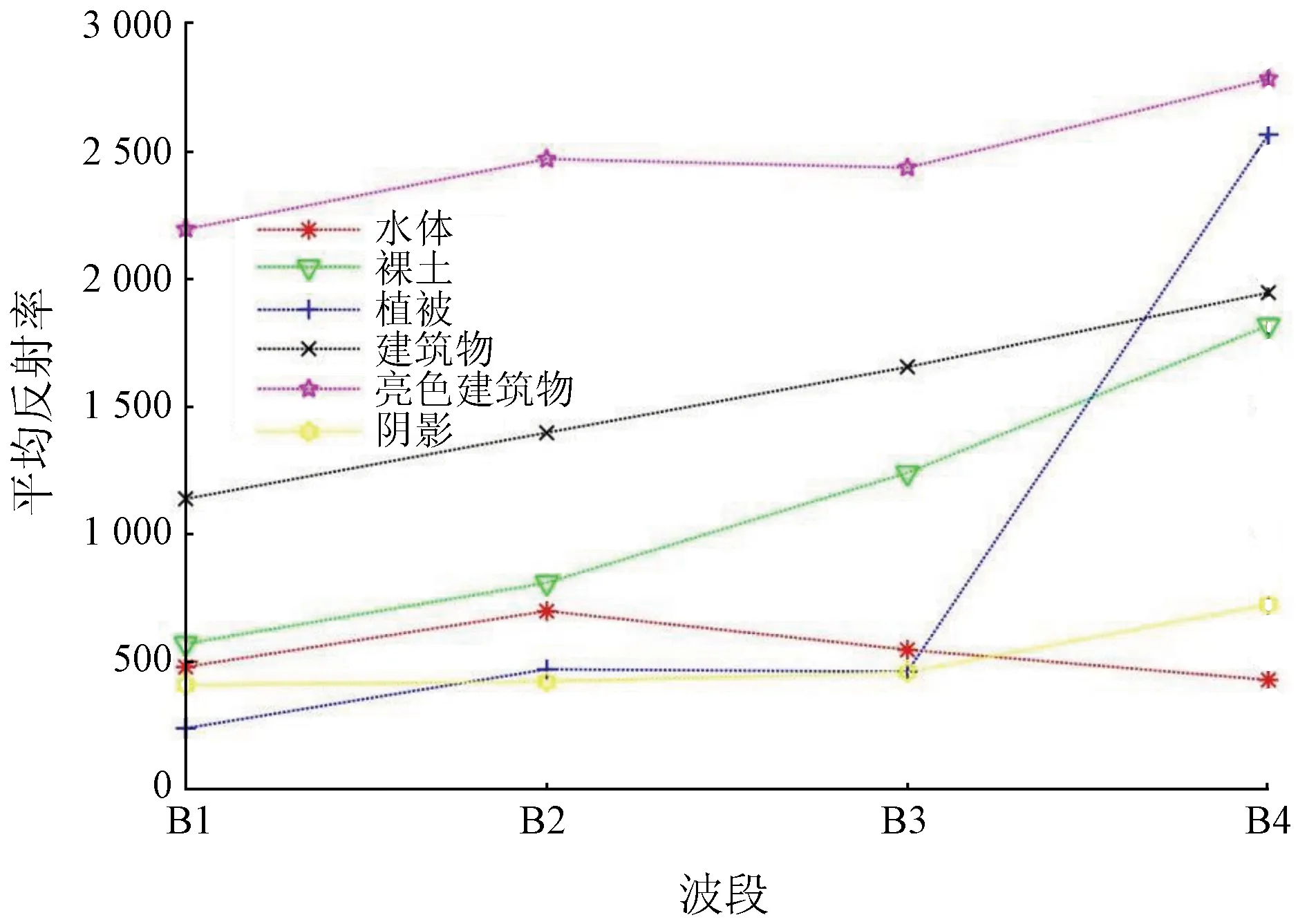
图1 各地物平均反射率波谱曲线Fig.1 Spectral curve of average reflectanceof each surface feature
2.2 水体指数的构建
通过以上分析,选取蓝光、绿光和近红外3个波段构建水体指数模型。根据水体的波谱特征,为扩大水体与其他地表覆盖物的可分离度,将近红外波段的反射率的整数倍与蓝光波段和绿光波段的反射率之和做差,即(nB4-B1-B2),B1,B2和B4分别对应GF-2号影像的第一、第二和第四波段的反射率。不同倍数下,各地物的CWI分布如图2所示,当n=1时,其实质为阴影水体指数(superfine water index,SWI),此时,建筑物和亮色建筑物与水体具有很大的重叠区域,不宜用于有建筑物区域的水体提取; 当n=2时,此时的水体指数受亮色建筑物的影响; 当n=3和n=4时,此时的水体与其他地表覆盖物具有良好的可分离性,但随着n的增大,近红外波段所占的权重就越大,绿光波段和蓝光波段所占的权重就越小,且水体指数范围就越大,不利于充分利用光谱信息。其次,随着n的增大,即在n=3的基础上不断地引入不同倍数的近红外波段,由于近红外波段具有一定的局限性,难以区分阴影和暗色地物,故对水体指数而言,将降低水体与其他地物的可分离度。故最终确定CWI模型为:
CWI=3ρNIR-ρGREEN-ρBLUE,
(1)
式中ρNIR,ρGREEN和ρBLUE分别为该像元在近红外、绿光和蓝光波段的反射率。


图2 不同倍数下各地物综合水体指数分布
3 结果分析及精度验证
由于GF-2影像波段数较少,故可选用的水体指数模型较少。同时段秋亚等[24]研究表明支持向量机(support vector machine,SVM)在GF-1影像提取水体中表现出良好的效果,故在验证过程中选用了现有的5种常用水体指数及SVM和随机森林(random forest,RF)2种分类器进行水体提取分析,常用水体指数见表1。由于卫星观测角度、卫星高度、光照条件、大气条件、环境噪声等的不同,阈值往往变化较大[11,25-28]。故在实验过程中为了避免主观选取阈值产生误差,故采用K-mean聚类算法结合水体指数提取水体,分类类别、变化步长和最大迭代次数分别取为10,0.01,1 000,将分类后的水体区域合并,得到水体提取结果。文中选取了4个研究区,其中研究区3和4是为了验证CWI指数在其他高分辨率影像上的效果。各研究区特征见表2。

表1 常用水体指数Tab.1 Common used water indexes

表2 研究区特征Tab.2 Characteristics of the study area
3.1 研究区1水体提取分析
研究区1大小为1 149像元×1 487像元,水体提取结果如图3所示,白色为水体区域,黑色为非水体区域,仅展示精度较高的几种提取结果。从结果来看,各种方法都能够很好地提取出水体区域,但CWI提取的水体信息更为完整,RF模型和MSWI指数在水体区域的边缘上出现明显的漏提现象。SVM,MSWI和ESWI在阴影区域均出现了误提的现象。精度评价选用总体精度和Kappa系数2个评价指标,精度评价结果见表3。



图3-2 研究区1水体提取结果

表3 研究区1精度评价结果Tab.3 Results of accuracy assessment in site 1 (%)
3.2 研究区2水体提取分析
研究区2大小为6 298像元×9 912像元,当研究区增大时,各水体指数均伴有“椒盐”现象的产生。针对上述问题,对图像进行分割,图像分割在ENVI平台上进行,自定义波段选择归一化水体指数和颜色空间,分割尺度为15,合并尺度为99,此时能够完整地分割出水体信息,在图像分割时,只考虑水体信息的分割效果,不对其他地物的分割情况进行评价,故无需复杂的分割算法。将分割后同质对象内的所有像元在相应波段上的均值作为该同质对象在相应波段上的反射率,本节中的实验所用数据若无特别说明,均为分割后的影像。将分割后的影像结合水体指数模型进行水体提取,结果如图4所示,白色为水体区域,黑色为非水体区域,仅展示精度较高的几种提取结果。为了与未进行图像分割的水体提取结果做对比,图4(f)展示了未进行图像分割的CWI模型提取结果。对于图像分割后的提取结果而言,CWI模型提取结果最优,错提现象少; 但对于池塘和水草茂密的区域,归一化水体指数和CWI均未能识别出来,主要原因在于水草茂密的区域,水体的反射率由水草主导,此时该区域在近红外波段的反射率增大,使水体指数失效; 对于其他方法而言,均出现了严重的错提现象。出现错提现象的区域主要集中在地物复杂的居民区。对于未进行图像分割的水体提取结果而言,由于提取是针对单个像元进行的,故错提现象并未像基于对象那样大范围的出现。为了更加直观地展现提取的效果,将图4(a)中的红框区域进行放大显示,结果如图5所示,白色的为水体区域,黑色为非水体区域。在该区域CWI模型和SVM均展现出了良好的提取效果; 未进行图像分割的CWI提取结果略差于图像分割的CWI提取结果。精度评价选用总体精度和Kappa系数2个评价指标,精度评价结果见表4。

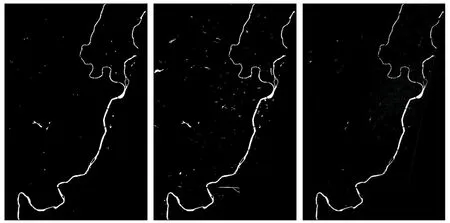

图4-2 研究区2水体提取结果


图5 研究区2局部放大

表4 研究区2水体提取精度评价结果Tab.4 Results of accuracy assessment in site 2 (%)
3.3 多特征结合的水体提取分析
在3.2节的分析中,首先单独的水体指数模型和分类算法在水体提取时都具有一定的优势,其次经过图像分割的水体提取结果优于未经过图像分割的水体提取结果。 故为了更加充分地利用水体的波谱信息和发挥分类器的分类效果,在研究区2中,在图像分割的基础上,将水体指数和4个波段作为RF和SVM的输入数据进行水体提取,本节中,监督分类的样本数据和验证数据与3.2节中所用的数据相同。仅选用分类效果较好的NDVI和CWI作为参与的输入数据,其中NDVI+原始波段记为第一类数据,CWI+原始波段记为第二类数据,NDVI+CWI+原始波段记为第三类数据。水体提取结果如表5所示,白色为水体区域,黑色为非水体区域,对于同一输入数据,不同分类器而言,RF的提取效果优于SVM; 对于同一分类器,不同输入数据而言,输入第二类数据时,分类精度最高,当输入第三类数据时,输入数据增加,相比前两类输入数据而言,提取精度并没有得到提升。
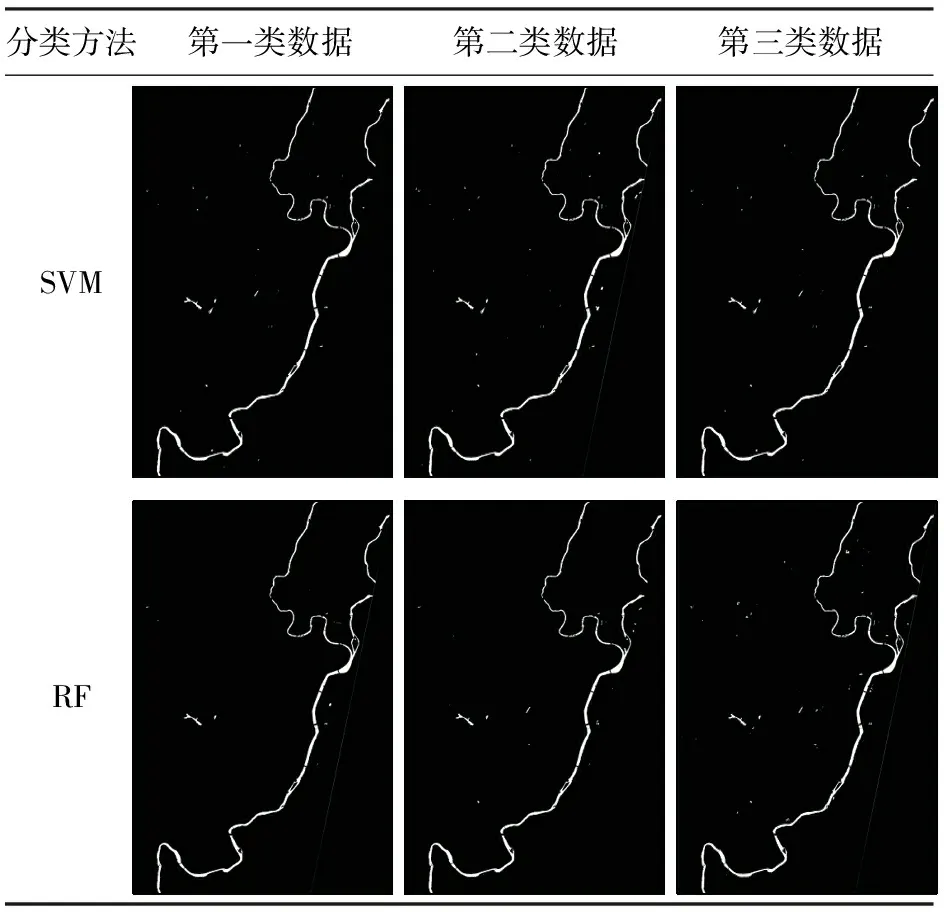
表5 不同数据组合水体提取结果Tab.5 Water extraction results ofdifferent data combinations
对各方法的提取效果进行定量评价,采用总体精度和Kappa系数2个指标,结果见表6。为了更加直观地展示水体提取效果,将最佳水体提取结果与原始影像进行叠加显示,结果如图6所示。

表6 不同数据组合水体提取精度评价Tab.6 Water extraction accuracy evaluation of different data combinations (%)

图6 研究区2水体提取结果
3.4 其他高分辨率影像水体提取分析
为了验证CWI在其他高分辨率遥感影像上的水体提取效果,选取了一幅数据融合后空间分辨率为0.5 m的WorldView-2遥感影像和一幅融合后分辨率为2 m的GF-1遥感影像进行实验。
WorldView-2卫星能提供8个波段的高分辨率遥感影像,除了有和GF-2相同的4个波段外,还包括海岸波段、黄光波段、红色边缘波段和近红外2波段。研究区3取自经过预处理后分辨率为0.5 m的WorldView-2遥感影像,大小为2 836像元×2 326像元。图像分割方式与研究区2相同,水体提取结果如图7所示,白色为水体区域,黑色为非水体区域,仅展示精度较好的几种水体提取结果。在图7中,NDVI和NDWI对亮色地物存在误提的现象; 其次,由于个别池塘水体较浅,为光学浅水区域,其中光学浅水区域指水底反射可以透射出水面并混淆在离水辐射中被传感器接收的水体; 此时的水体所反射由水底地物覆盖类型主导,故CWI出现了漏提现象; 在该区域,由于缺少建筑物和阴影的影响,故各种方法均能够较好地提取出水体信息。对水体提取结果选用Kappa系数和总体精度进行定量评价,结果见表7。
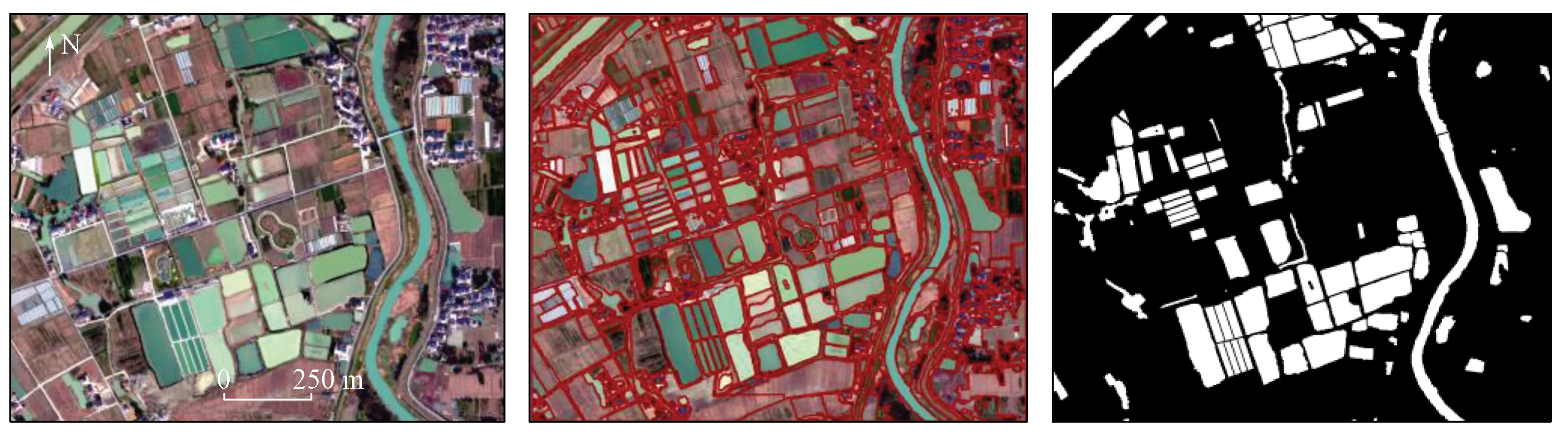


图7-2 研究区3水体提取结果

表7 研究区3水体提取精度评价结果Tab.7 Results of accuracy assessment in site 3 (%)
GF-1遥感影像,共有4个多光谱波段,分别为绿光、蓝光、红光和近红外波段,数据包括空间分辨率为8 m的多光谱波段和空间分辨率为2 m的全色波段。实验均在经过融合后的空间分辨率为2 m的影像上进行,研究区大小为426像元×523像元,地表覆盖物主要包含裸土、暗色地物、池塘和建筑物,图像分割方法与研究区2相同。水体提取结果如图8所示,白色为水体区域,黑色为非水体区域,仅展示精度较好的几种水体提取结果。NDWI难以有效区分出水体信息,在裸土、暗色地物、建筑物等区域都出现误提的现象; 其他水体指数模型均难以有效地提取出水体信息,主要原因在于该区域地物单一,存在大量暗色地物和蓝色屋顶的建筑物; 对于CWI而言,能够完整地提取出水体信息,没有出现漏提和误提的现象。对水体提取的结果选用总体精度和Kappa系数2个指标进行定量分析,结果见表8。


表8 研究区4水体提取精度评价结果Tab.8 Results of accuracy assessment in site 4 (%)
4 结论
在本文的探究中,为了验证CWI模型的水体提取效果,结合图像分割和分类器进行水体提取实验。得出以下结论:
1)本文构建的CWI模型能够抑制建筑物、阴影及亮色地物的影响,很好地提取出水体信息。总体精度和Kappa系数分别为99.95%和99.83%,与其他方法相比,精度明显提高,Kappa系数比SVM和RF分别高出7.62百分点和5.41百分点。
2)对于CWI而言,无论是单独使用,还是与图像分割或分类器相结合,同等条件下,精度均明显高于其他水体指数模型和2种分类器。
3)图像分割结合CWI模型,能够有效抑制“椒盐”现象,提高水体提取精度。
4)CWI模型还适用于WorldView-2和GF-1影像,具有较好的水体提取效果,水体提取精度明显高于其他水体指数,Kappa系数高于94.62%。
