登高平台消防车工作斗自动调平技术研究
2022-09-20王龙
王 龙
(东营市消防救援支队,山东 东营 257000)
随着我国经济社会的快速发展,现代城镇化规模的不断扩大,城市在规划建设中高层建筑越来越多,建筑物越来越密集,一旦高层建筑发生火灾事故,对于救援难度极大。登高平台消防车的设计有效地解决了这一问题,是消防员进入火灾现场开展高空灭火、营救被困人员的首选装备,有效提高了消防队员的灭火能力和救援水平。因此,借助登高消防车进行高空作业,可供消防人员第一时间进行施救,但高空救援对于升降调平系统是极大的挑战,在消防车工作斗升降的过程中,由于臂架的变幅运动与地面呈现曲线运动,操作不当就会造成工作斗发生倾斜。如果工作斗出现来回调整、倾斜及过调等问题,就无法保证工作斗的稳定性,进而影响消防员的有效救援。为保证工作斗内消防员的安全,本文着重阐述了机械液压组合对消防车工作斗调平的工作原理,论述了登高平台消防车工作斗自动调平系统,保证工作斗在升降中始终处于水平状态,为消防员实施高空救援提供有效保障。
1 登高平台消防车工作斗调平工作原理
登高平台消防车主要由升降系统(臂架系统)、工作斗、支撑系统、底盘、消防系统、电气系统和液压系统等部分构成,采用独立调平的液压设计系统[1]。工作斗又被称为工作平台,安设在臂架系统的最前端,工作斗具有载人和灭火的功能,消防员在工作斗中可通过控制平台操作臂架,喷射水炮灭火或喷出水雾为工作斗降温。登高平台消防车工作斗调平性能是保障消防员作业安全、评价消防车工作性能的关键环节。在工作斗安装倾角传感器用来确定臂架伸展的角度,测算臂架距离地面的水平夹角,通过夹角的变化,操作阀块控制臂架的伸展、变化等动作,通过调平油缸的伸缩和连杆系统的协调运转,确保工作斗始终处于正确的水平位置,便于工作斗中的消防人员开展救援。电液比例阀能够根据电控、手动和液控等方法对液压油缸进行调节,系统依托算法调节电液比例调节装置,通过转换模块,根据工作斗倾斜的角度按比例与电流信号相对应,将电流信号输送到PLC控制系统之中,PLC经过计算控制调平油缸的电液比例阀门和伸缩长度,控制工作斗向上倾斜或向下倾斜,以此保证根据现场实际满足救援的需要[2]。
2 影响登高平台消防车工作斗调平的因素分析
为确保登高平台消防车工作斗调平系统的稳定运行,保证消防员高空作业的安全,调平系统必须要保证消防工作斗的稳定性,防止工作斗在升降过程中出现抖动、偏离等问题。目前,经过实践来看,影响工作斗调平的因素主要有以下方面。
2.1 液压阀的控制
液压阀是整个调平系统的关键,也是整个控制系统的核心部件,液压阀的精度决定了调平的稳定性[3]。当前,液压阀主要有伺服换向阀或比例换向阀。电液伺服阀具有高精度的阀芯监测装置,在接收到模拟信号后,输出相应的调制流量和压力,保证臂架的有效运动,但伺服阀成本较高,对液压油的清洁程度要求极高,经常因油液受到污染而发生阀门磨损的问题,所以在登高平台消防车推广使用上有一定难度。电液比例阀加工相对简单,元件数量较少,加工成本在可控范围之内,在复杂环境中可以无障碍使用,能够连续地无间断地根据比例需求,对油液的压力、流量或方向进行控制,有着极高的稳定性和快速响应能力。因此,大多数登高平台消防车采用液压比例阀进行调平,这也符合技术进步和产品应用发展趋势。
2.2 传感器的控制
调平系统中发挥决定性作用的是传感器,如果传感器输出的信号不准确,就会造成电液比例阀输出的动作与实际不符。因此,传感器是调平控制系统的主要信息来源,其传感器的精准度、稳定性至关重要。当前,登高平台消防车的倾角传感器多为重力感应装置,用来测量倾角的数据,当工作斗与水平地面出现夹角,传感器受重力偏移的影响,设备中的电位器就会发出电流信号,信号越强倾角越大。但如果工作斗不稳定,在风力或其他外力作用下出现振动,就会使传感器容易受到环境的影响,使其精准度无法保证。
2.3 算法的控制
通常情况下,控制的精度越高,对工作斗调平系统效果就越好,但实际情况是,精度的提高意味着成本的上升、算法更为复杂,需要根据登高平台消防车的实际状况确定控制系统。电液比例调平作为工作斗调平的主流设备,被广泛应用于调平系统之中,但电液比例调平还有很多不足,为确保工作斗的稳定性和精准度,就需要在不增加硬件设备投入的情况下,不断优化控制算法,使其与调平系统相匹配[4]。
3 登高平台消防车工作斗调平系统设计
登高平台消防车工作斗调平系统主要包括PLC、倾角传感器、电液比例阀、调平油缸、控制电路等臂架系统等构件组成,分为检测系统、控制系统和执行系统3部分,检测系统主要用来检测收集数据并传输给控制系统,控制系统根据传输的信号作出响应,执行系统再根据控制动作,根据臂架的实际情况进行升降调平。整个调平系统的工作流程如图1所示。
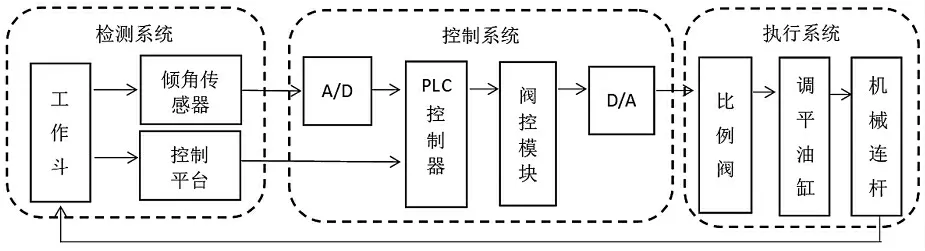
图1 登高平台消防车工作斗调平系统结构图
3.1 检测系统
检测系统主要由倾角传感器组成,用来检测工作斗与水平地面之间的倾角,检测的结果作为工作斗调平的重要依据,其倾角传感器的精度直接影响最终的调平结果[5]。倾角传感器具有体积小、精度高和功耗低等特点,安装在消防车工作斗上,可实时采集工作平台倾角信号,输出模拟量电流信号,电流输出的大小是根据工作斗倾斜角度变化而变化的,满足用户静态条件下高精度倾角测量等应用需求。操作人员通过臂架操作台可以将控制信息传送到调平控制器,控制器根据接收到的操作信息,将臂架运动的轨迹和状态形成数据,反馈到控制器之中,获得臂架角度、臂架姿态等数据。登高平台消防车工作斗如图2所示。
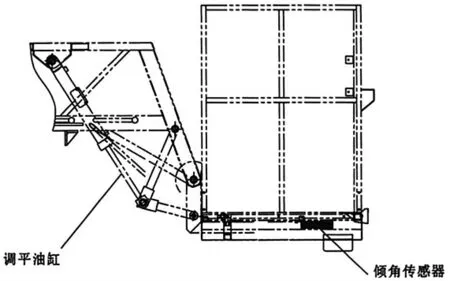
图2 登高平台消防车工作斗示意图
当工作斗升降的过程中,消防车臂架开始运动时,会使得工作斗与水平面发生偏离状态,即工作斗与水平面产生夹角α,这个过程中倾角传感器感知夹角大小,经过A/D转换模块,转换为模拟电流信号,传输到PLC的输入端口,从输入值的变化趋势可以分析出工作斗的倾斜方向,电流信号输入越强说明夹角越大,反之输入越弱则说明夹角越小。倾角传感器内设继电器,如果倾斜角度始终在-10°~10°之间,继电器就始终保持吸合状态;如果一旦夹角超过-10°或10°以上,说明工作斗发生严重倾斜问题,继电器会自动断开,液压系统随之失去运动能力,工作斗也会紧急停止工作状态。但在工作斗调平之初,前提条件是要保证消防车处于水平位置,这个阶段需要通过液压泵调节支撑腿,使得4个支撑腿处于同一水平位置,PLC传感器读取支撑腿的压力和数值,根据倾角传感器调整支撑腿的升降,使得整个消防车控制台处于同一平面,为下步消防车工作斗升降奠定基础[6]。
3.2 控制系统
控制系统主要由操纵装置、电子电路、单片机、PLC和安全装置组成,用来解决登高平台消防车臂架、工作斗运动问题,该种方式调平性能好、技术水平领先,而且适用性能广,可有效确定设备运动方向和运行速度,控制设备的启动停止。PLC控制器作为控制系统的核心部件,具有通用性好、实用性强、编程容易和可靠性高等特点,可实现登高平台消防车臂架自动控制、安全保护,使得消防车的操作更加安全、简单和可靠。PLC控制器在接收到电流信号后,通过PLC控制器的内部模块算法处理后,得出工作斗倾斜的角度,形成控制调平油缸电液比例阀的脉冲调制信号,触发液压缸电磁阀开关,根据倾角传感器提供的输入信号,可有效控制电液比例阀的开关比例,从而保证控制油缸的伸展和缩短长度,驱动工作臂和工作斗上下运动,始终保持工作斗在可控水平的范围内升降。该过程中PWM技术是核心,该技术驱动电液比例阀的开度,通过系统中的半导体元件进行通断控制,将直流电压转变为一种脉冲信号,使得输出端接收到脉冲进行调节,PWM技术的本质就是脉宽调制,通过输出不同的占空比,从而将直流电压转换成不同电压值的模拟信号。
电磁阀的换向和开口大小控制液压油缸的变动幅度,传递到臂架结构上,电液比例阀有2个口,进油口A和回油口B。当A口进油,B口回油时,油缸的活塞杆就会伸长,工作斗出现上仰的状态;当B口进油,A口回油时,油缸的活塞杆就会缩短,工作斗出现下俯的状态,最终使工作斗恢复至水平。与此同时,为防止自动调平系统出现失灵的问题,登高平台消防车还设置了手动调平系统,当消防车自动调平系统出现故障,系统会为手动控制平台电磁阀通电,使得阀芯发生变动,推动油液进入到调平油缸之中,实现消防车工作斗的手动控制。比例阀液压原理如图3所示。
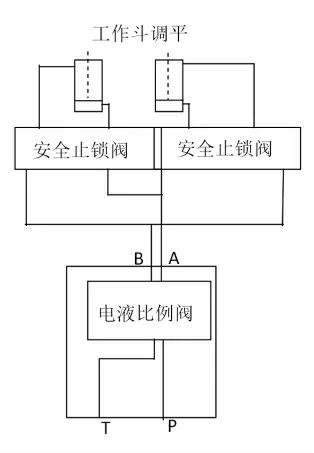
图3 比例阀液压原理图
3.3 执行系统
执行系统基本采用电气液压操纵方式,由臂架、机械液压组合、连接电缆和液压管路等组成。臂架系统是登高平台消防车执行系统的重要构件,由高强度、安全性能好的钢板结构组成,从臂架侧面安装了消防管路,可保证消防液输送到高空进行灭火。登高平台消防车臂架结构分为折叠式、伸缩式、混合式和垂直升降式等,消防车普遍使用的是混合式臂架,主要采用伸缩和折叠式臂展结合的方式,对工作斗进行升降控制。该方式兼顾伸缩和折叠优点,可适用于大高度下的高空消防救援。臂架系统主要由调平连杆组成,调平连杆由一组或多组平行四边形组成,各平行四边形的短边相连接,根据平行四边形对边保持平行的原理,在臂架运动的过程中2组或多组四边形对边始终处于平行位置,由此保证臂架无论如何折叠或伸缩,其工作斗都处于连续的运动过程,始终保持处于水平的状况[7]。登高平台消防车机械连杆系统如图4所示。

图4 登高平台消防车机械连杆系统图
机械连杆系统根据平行四边形的原理用来保持工作斗处于水平状态,整体机械的折叠臂主要由BC、CD、EF、FG、GH、HI和IJ等部分构成,臂架主要由3组平行四边形连杆系统构成,连杆系统将工作斗与调平油缸相连接,调平油缸的伸缩可影响连杆系统的变动,通过销轴铰接相连接传递作用力,带动消防车工作斗转动,点A、G和J作为消防车臂展之间的连接点,在一号臂展和二号臂展变动时,由于几个点位始终保持平行四边形状态,当臂架运动起落时,平行四边形AB与CD保持平行,FG与DE保持平行,IJ与GH保持平行,这使得臂架无论如何变化,通过变幅油缸的调节变化,工作斗始终保持在水平的状态。
4 结束语
工作斗是消防车高空灭火、救援人员的必备装备,对于高层建筑物安全救援具有重要作用,工作斗自动调平系统首要任务就是稳定性、安全性和舒适性,消防员在消防车工作斗作业,一旦升降过程中发生工作斗倾斜,极容易产生新的危险。随着液压控制装备越来越智能化和先进化,快速调平工作斗是保证消防救援的关键。本文通过PLC控制系统精准控制油缸动作,解决了消防救援高空作业工作斗调平问题,为验证登高平台消防车工作斗自动调平系统的性能,在实际测试中发现,工作斗倾角基本上都可以控制在3°之内,保证了工作斗升降过程自动调平,在众多场合满足高空救援的使用需求。
