支持分页显存的高性能哈希表索引系统①
2022-09-20熊轶翔蒋筱斌武延军
熊轶翔, 蒋筱斌, 张 珩, 武延军
1(中国科学院 软件研究所, 北京 100190)
2(中国科学院大学, 北京 100049)
1 引言
哈希表(hash table), 也称散列表, 是一种根据关键码值技术(key value)来为大规模数据提供直接访问操作的数据结构, 其通过将关键码值映射到表中的一个位置来访问记录数据, 以O(1)时间复杂度来加快数据查找速度. 哈希表作为一种广泛采用的基础数据结构和核心算法, 为程序提供对各类数据(文本、流媒体、结构型数据等)高吞吐、低时延的增删查改操作. 随着数据规模的不断扩大和各类应用对高性能的需求, 哈希表技术在当前数据库软件、系统软件和应用软件中都得到了大规模采用.
在深度学习框架TensorFlow和PyTorch对稀疏矩阵的处理中, 哈希表的应用大幅度提高存储效率, 也保证了数据块的吞吐低延迟; 在大规模数据处理应用(图处理[1,2])中, 哈希表的高效查询作用至关重要. 此外, 哈希表作为数据库系统的核心模块[3-6], 频繁地被大规模并发事务的索引、更新、删除等操作调用. 在游戏应用领域, 对动辄上百万体素的游戏模型修改和访问[7],哈希表提供系统的可靠性保障. 由于哈希表作为各类系统的核心数据结构来使用, 因此, 对于哈希表的高性能优化能使整体系统的性能、可扩展性各方面得到大幅度提升[6,8,9]. 如何进一步优化哈希表性能以及在各类新型的并行计算机架构上设计高性能哈希表一直是学术界和工业界重点关注的研究领域. 当前的研究对哈希表的数据结构设计、并行度优化、索引冲突等多方面开展各类工作. 在并行哈希表的优化上, 这类研究工作多基于多核CPU架构开展, 设计了面向非统一内存访问(NUMA)、对称多处理(SMP)等高性能服务器架构的哈希表结构优化[10], 并通过融合其他数据结构(如索引树形、环形缓存队列等)以提高哈希表的并行处理性能, 降低多线程下的哈希索引冲突. 随着高性能的体系结构发展, 通用图形处理器(GPU)作为协处理器的性能得到了大幅度提升. 单块GPU处理单元提供了万级以上线程数的高并行计算能力和高于100 GB/s显存带宽, 大幅提高高通量工作负载的性能, 例如, 单块NVIDIA V100 GPU卡提供了多达5 120流处理单元. 高性能哈希表的研究工作开始利用协处理GPU的大规模并行和高性价比的优势来优化哈希表的大规模并发散列事务操作[7,11], 例如, 英伟达cudpp[12,13]设计静态哈希操作, 显著地提高了数据索引性能, 相对比sorted array[14]、cuckoo[15]等各类CPU索引方法性能提升1-3倍[12,16]. 在对于GPU哈希操作的优化中, 相同哈希值的键值对无法存放在哈希表中的相同位置导致了GPU大规模线程间哈希冲突(溢出处理)开销, 因此GPU哈希表工作着重于优化GPU内并行处理来离散线程间访问, 降低索引冲突. 进而, GPU哈希表研究衍生出动态哈希和静态哈希两类工作.
通过前期的调研, 目前主流的GPU哈希操作主要使用cuckoo哈希算法的静态哈希, 在插入和查找时采用固定大小的GPU显存预分配, 因而其并行度更为线性, 整体性能高, 然而由于预分配需要占用大量GPU显存空间, 导致GPU显存利用率地下, 缺乏可扩展性;而使用“桶”策略的动态哈希表在具备了可扩展性的同时弹性的“桶”缓存分配带来了一定的显存操作开销,其整体性能略逊于静态哈希策略. 具体地, 表1给出了当前GPU哈希策略方法的优缺点对比.

表1 静态哈希与动态哈希对比
然而, 高性能哈希表的研究多采用单一设计模式,即选择性地构建静态哈希或动态哈希, 没有很好融合这两类哈希表的优点, 同时, 由于GPU显存占用率非常高,在显存不足以存放整张哈希表时整体系统无法正常运行. 综上, 现有GPU高性能哈希表的研究工作仍然存在如下两类缺陷: (1)由于GPU全局显存的局限性(如V100 GPU提供32 GB DDR5全局显存), 现有工作受限于存放大规模的哈希表结构, 无法支持超过GPU显存的哈希事务, 整体系统的可扩展性和弹性受到限制;(2)随着数据量不断增大, 导致以多核优化的哈希表方法无法满足高性能的数据索引操作. GPU显存资源在同一时间会有多个任务同时需要占用, 导致留给高性能哈希表的空间不足以处理更多的并发访问事务. 当空间不足但是任务所需要处理的数据量较大时, 目前的哈希表设计就略显不足了. 因此, 对哈希表结构的空间结构的压缩和数据结构的分布优化显得至关重要.
本文聚焦于结合静态哈希和动态哈希各自的优点,借鉴Linux的页面交换机制, 设计一种兼具高性能和高扩展性且对于显存空间受限GPU架构的全新高性能哈希表结构和方法. 本文将传统的哈希表分割为多个子表(文中可能同时称作子表或ChildTable), 并使用子表来支持GPU优化, 通过stream支持流水线insert操作, 利用GPU多线程机制支持search以及delete, 相对现有工作提升了insert操作性能1.5-2倍. 本文主要贡献如下:
(1)针对GPU显存占用过高以及静态哈希表插入性能缺陷问题, 本文首次提出多子表技术, 即构建层级页表机制来将结构过大的哈希表分解为多个小结构表来统一管理; 构建局部GPU显存驻留策略, 以支持同一时刻只需驻留少部分子表的GPU工作流, 大大降低GPU显存占用率.
(2)进一步, 本文设计了Starfish原型系统, 以支持各类GPU哈希表操作, 不限于select/insert以及update操作, 并优化多子表技术将insert操作流水线化, 在提升并行度的同时大幅度降低插入失败时重新哈希表结构构建开销.
(3)实验结果表明, 在多类现实标准数据集上的测试, Starfish在insert以及重新构建的性能方面, 相对于NVIDIA最新的GPU哈希表工作cudpp-Hash显著提高了1.5-2倍; 显存占用量降低为cudpp-Hash的5%-10%以及SlabHash的1%-2%.
2 相关工作
2.1 面向GPU的高性能哈希表
随着各类高性能协处理器单元(如GPU)的架构性能不断提升, 当前的学术研究方向开始转向利用GPU服务器来设计高性能的哈希表操作. 相对比CPU处理器上有限线程的并行计算环境, 通过GPU协处理器上基于单指令多数据流(SIMD)芯片架构特性来构建全新的哈希表并行事务策略的处理性能得到了显著提升, 提升了若干数量级[12,13,18,19]. 各类并行哈希操作的优化工作利用GPU等大规模并行硬件特性来进行加速, 主要通过如下两个方面进行: 1) SIMT架构为哈希表的并行操作提供了只读性事务的大规模并行;2)高内存带宽为哈希表的数据访问带来了大数据量的访问吞吐提升以及高效的原子性操作. GPU哈希表cudpp-Hash[12,13]利用的cuckoo哈希方法以及公共溢出区策略, 第一次提出了标准的GPU下哈希操作, 被广泛应用于NVIDIA下的各类算法库[18,19]. 通常地, 现有GPU哈希工作主要分为两类: 一类是面向静态GPU显存空间分配的静态哈希表, 另一类是以动态页表方式提供弹性GPU显存优化的动态哈希表. 这两类工作各有所长, 具体如本节接下来所述.
2.2 静态哈希相关研究工作
面向GPU的静态哈希表都是基于cuckoo策略[15]来处理哈希冲突, 但也有不使用cuckoo策略的哈希表设计, 例如Khorasani等人提出的stadium hash[20]在解决冲突的时候不会驱逐原有的键值对, 而是直接寻找下一个合适的位置. 最经典的GPU静态哈希表为Alcantara等人提出的cudpp-Hash[12,13,16], 已被Nvidia作为标准哈希库推出, 其算法策略采用cuckoo实现, 此外还加入了stash的机制来尽量减少插入失败的频率. cuckoo的多个备用哈希函数机制会带来重复探测次数过多而导致的性能下降问题, 因此Breslow等人提出的Horton table[21]使用了一种紧凑的数据结构来存放键值对使用的备用哈希函数索引, 以减小重复探测的次数. 除此之外, 与cudpp类似且比较能适应大规模并行的哈希表还有使用罗宾汉哈希方法[22]的 coherent parallel hashing[23], 但是同样面临着静态哈希的常见困境.
2.3 动态哈希相关研究工作
Ashkiani等人提出了一种面向GPU的动态哈希表SlabHash[17], 利用动态哈希“桶”的思想避开了处理哈希冲突的挑战, 而是在发生哈希冲突时将键值对直接插入目标“桶”中. 在进行事务操作过程中, 以warp为单位并大量使用ballot、shuffle等warp内部通信的API来加速处理. 此外还设计了SlabAlloc机制来以warp为单位动态分配新的slab空间. 这样的实现在用户看来是动态的, 且不会像静态哈希那样发生插入失败的问题, 但实际上是以较大的显存空间浪费为代价的.
作为最新的GPU哈希表研究工作, slab hash[17]和stadium hash[20]基于GPU架构提出了当前性能和可扩展性较好的设计, 其中slab hash是一类典型的动态哈希表, stadium hash是一种静态的哈希表. 此外, 已广泛应用于NVIDIA RAPIDS框架[19]的cuDF哈希策略和HashGraph[24]两种哈希表的实现更加具有可扩展性和灵活性, 然而由于其采用过高显存频率操作而造成内存性能瓶颈, 导致了严重的性能抖动.
2.4 当前工作在局限GPU显存条件下存在的缺陷
从目前研究工作来看, GPU哈希表策略大多基于将整个哈希表存放于显存中来设计的, 但是如果哈希表太大而GPU所剩的显存空间无法满足要求时, 这些设计就无法正确运行起来. 因此Khorasani等人提出的stadium hash[20]提出了一种out-of-core的策略, 用户可以自行选择将哈希表存放于显存或者主存, 当存放于主存时, stadium hash使用一种ticket board的机制来减少显存与主存之间不必要的PCI-E交换, 以此达到降低使用锁页内存带来的性能损耗. 另外同样使用类似out-of-core方法的哈希表还有Hopscotch hashing[25]和Cache-Oblivious hashing[26].
3 挑战及应对
总结GPU哈希表设计面临的技术挑战如下.
3.1 挑战1: 哈希表键值对在冲突处理的开销过大
传统的静态哈希表在发现某个键值对完全无法插入的情况下(failure)则会重建整张表, 当这种事件发生在整个建表的尾期时, 则将会将前期所有完成的工作都丢弃然后进行重新构建(restart), 这样会造成极大的浪费. 因此本文拟提出一种failure处理机制, 将failure的影响范围缩小到一个较小的区间, 在这个区间内进行restart, 将整个failure处理的过程都控制在这个区间内, 这样发生failure之后和进行restart都不至于影响整个哈希表. 发生failure的后果就是影响建表性能,因此本文的设计旨在降低failure对于性能的影响.
3.2 挑战2: 无法支持GPU显存外哈希表索引
由于GPU协处理器的显存资源有限, 因此每个应用程序在占用GPU显存时所能获得的资源多采用共享GPU显存模式, 即各自占用百分比显存空间, 这将导致在GPU显存空间受限情况下大规模哈希表结构无法完整缓存于GPU显存空间, 将导致整体的性能和可扩展性受限. 通过前期调研, 当前GPU哈希表的实现均在显存可容纳整张表或者整张表完全放在pinned memory的前提下开展研究, 然而有限显存空间无法容纳整张哈希表; 若干工作提出利用统一地址空间对GPU显存扩展[20], 然而这类哈希事务的访问仍需要利用PCI-E来进行大量的host端和GPU device端的数据交换操作, 导致数据访问效率低下. 因此, 本文提出了一套全新的GPU核外计算(out-of-GPU-memory)的策略, 将哈希表中暂时不用的子表缓存空间从显存中交换(swap)到host端主存中, 而当前需要访问的热度哈希表部分则驻留在GPU显存中. 此外, 通过自定义显存驻留表大小和数目, 本文设计了显存的占用的弹性伸缩机制, 根据用户配置项设置显存空间占用.
上述的全新哈希表结构设计对于局部性的GPU显存访问模式来说, 不会因为数据在主存中而降低读写速度, 反而会因为不常用的数据不占用显存空间而节省空间, 让同一个进程的其他部分甚至其他CUDA进程获得更多可用的显存空间.
3.3 挑战3: 可扩展性与性能缺陷
针对当前的动态哈希和静态哈希优缺点和高性能的技术挑战, 本文提出了一种新的基于页表切分区域管理的哈希表数据结构表示, 以融合两种哈希表的高性能和高可扩展性优势. 进一步, 本文设计了哈希表原型系统StarFish以支持上层的高性能哈希应用, 支持各类增删改查的哈希表事务操作.
4 方案设计
本文聚焦于结合动态哈希表和静态哈希表各自的优点, 基于分层页表机制提出了一种全新的GPU动态化显存页分配与静态操作的哈希表——Starfish, 并且具备低显存的能力.
4.1 Starfish架构设计
面向GPU的哈希表系统Starfish的总体技术架构图如图1所示. 顶层架构分为两个部分: 主控逻辑端(host)的CPU处理器主内存的Daemon模块(图1中的①)、事务性哈希表数据I/O模块②以及协处理器控制逻辑GPU执行部分(kernel计算服务模块③).

图1 Starfish 整体架构
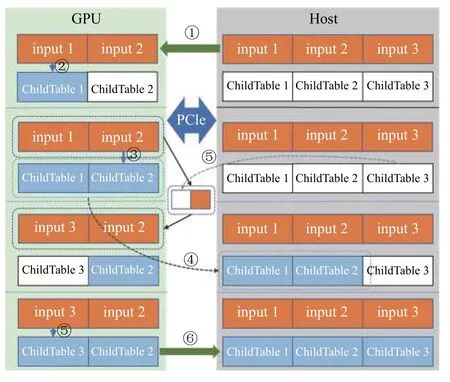
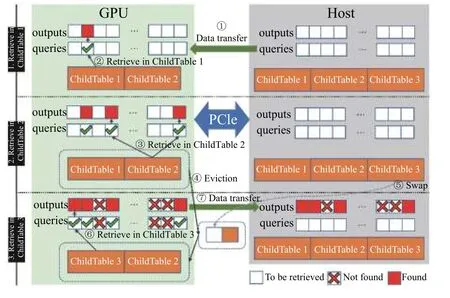
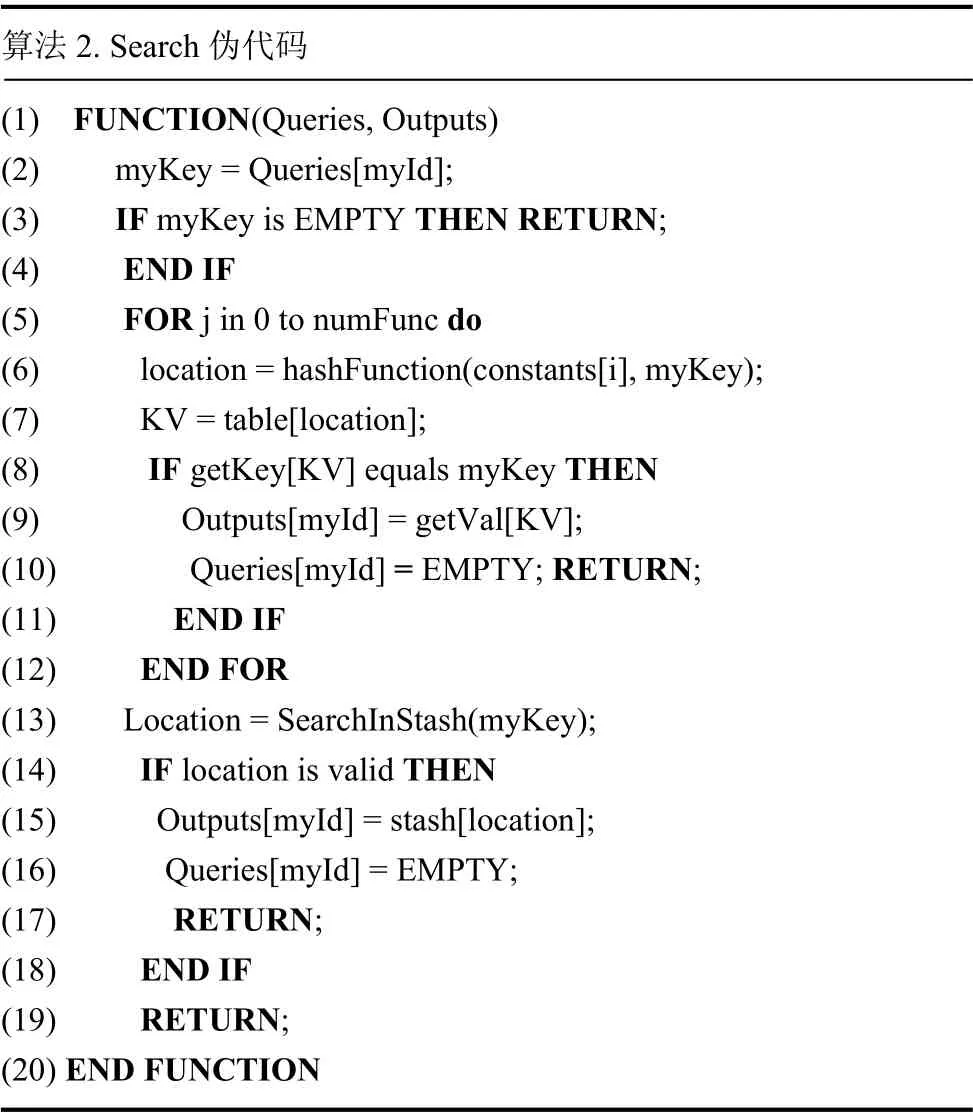
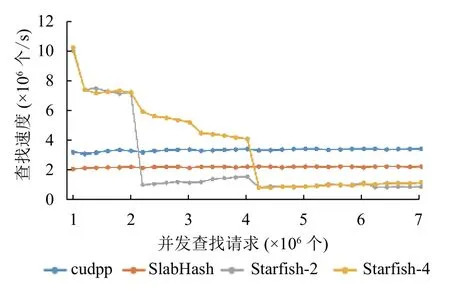
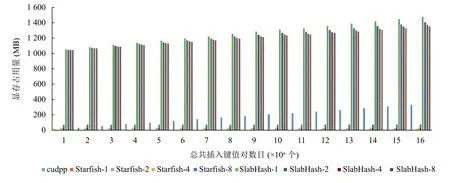
其中, Daemon主控逻辑①用于管理整个系统, 记录了当前的子表数、驻留在GPU中的子表索引, 以及指向主存和显存中多个子表的指针. 一个页面(子表)就是一个可以向下兼容的完整的底层哈希表, 可以使用cudpp-Hash、horton table等来作为底层哈希表.具体地, Starfish的数据I/O模块②通过构建页表的数据结构(ChildTable, 子表)方式来对动态哈希页进行统一化管理; 所有的底层哈希表(称为子表)以固定内存页(默认情况下64 MB)形式进行构建, 其组成形式以若干 通过如上的架构设计, Starfish构建了子表内存页的独立缓存空间, 通过对大规模的哈希表结构进行均衡切分和轮转实现局部独立处理. 此外, Starfish系统支持动态增减子表的数目, 不仅能够为上层的哈希表的索引操作提供静态哈希表策略的高性能操作, 而且通过弹性化的GPU显存控制, 实现了动态化大规模哈希表应用. 由于GPU显存空间的局限性, 大规模哈希表事务操作无法完整地利用GPU进行并行操作, 这也带来了目前各类哈希表的高性能操作的可扩展性局限. 为了解决大规模哈希表结构在CPU-GPU之间的高效吞吐问题, Starfish基于CUDA Streaming对象策略, 在ChildTable数据结构基础上构建了高效的哈希表内存页置换策略. 通过设置哈希表数据缓存区大小阈值,Starfish在哈希表数据量只够部分存放于GPU显存空间情况下, 自动地启用CPU与GPU间数据I/O轮转策略, 将整体的哈希操作进行均衡切分, 存放哈希表的部分于显存. 下面, 本小节将对Starfish所支持的哈希表操作的插入(insert)、检索(search)等关键操作的实现流程进行详细阐述. 4.2.1 基于CUDA Streaming异步策略的插入操作 在哈希表插入操作(insert)过程中, 无需把所有的输入数据和整个哈希表都存放于显存中. 如图2所示,在输入(input)哈希事务为3个事务数据列表时, 每段输入事务数据列表长度相等且都为默认的100万个键值对, 允许最后一段长度小于其他段. 在显存上只开辟两段对应的input事务列表空间以及两段ChildTable空间. 以图2为例, Starfish的插入过程: (1)考虑到GPU缓存空间局限, 将只对input1和input2的插入事务列表加载至GPU显存空间. 进一步据这两个事务集合构建GPU哈希表内存页ChildTable1和ChildTable2;进而, input3插入事务集合的执行无法完整地缓存至GPU显存空间, 因此Starfish将ChildTable1从显存中传输到主机上存放, 并且将input3加载至显存, 在原有ChildTable1的缓存空间构建ChildTable3显存页; 以此操作循环, 直至将所有的插入事务集合处理完成, 并且所有ChildTable数组都传输到CPU主存端备份. 由于对多个互相独立的ChildTable操作独立化, 因此Starfish在构建插入事务哈希表空间时实现了高性能的并行加载和备份机制. 进一步, 基于CUDA Streaming对象策略, Starfish CUDA通过设置若干个Stream来异步化ChildTable内存页的CPU-GPU的I/O操作和GPU核函数的并行执行, 通过对不同ChildTable构建任务异步化, 从而能让不同ChildTable的PCI-E数据传输和kernel运行同时进行, 隐藏数据传输时间或者kernel运行时间. 图2 Starfish 哈希表事务 insert 操作 算法 1. Insert伪代码(1) FUNCTION(Keys, Vals)(2) myKey = Kyes[myId]; myVal = Vals[myId];(3) myKV = makeKV(myKey, myVal);(4) myLocation = hashFunction(constants[0], myKey);(5) FOR I in 1 to maxAttempts do(6) KV = atomicExch(table[location], myKV);(7) IF KV is EMPTY or DELETED THEN break;(8) END IF(9) determine_next_location(KV);(10) END FOR(11) IF KV is not EMPTY THEN(12) IF TryToInsertIntoStash(KV) is successed THEN(13) RETURN true;(14) END IF(15) RETURN false;(16) END IF(17) RETURN true;(18) END FUNCTION 4.2.2 基于顺序粒度组合的高效索引(search)操作 如图3中所示, 在索引(search)过程中, 考虑到各个索引查询(query)的粒度大小对于整个表的缓存空闲相对较小, 因此将所有查询集合(queries)操作放入显存空间后再进行并行事务操作更为适合. 以图3为例, 具体的查找过程如下: (1) Starfish构建统一化query查询数组对各个查询事务进行组合封装形成查询集, 归并后加载至GPU显存后, 执行索引GPU核函数在GPU哈希缓存页中进行并行检索. ChildTable1和ChildTable2内存页为阶段性缓存于GPU内存页中,GPU将执行检索(search)核操作对所有输入的查询事务集合并行检索. 然而, 在检索过程中, 由于存在哈希索引冲突, 为了进一步降低被重新索引开销, 我们将成功哈希检索到的键值key在查询集合(queries)中置空.(4)在对ChildTable1和ChildTable2的操结束作之后,Starfish将ChildTable1内存页置换到主机内存上, 然后将ChildTable3放入显存, 再在ChildTable3上对查询集合中还未被成功查找到的queries进行查找. 图3 Starfish 哈希表事务 search 操作 在GPU的SIMD编程模式下, GPU中的若干个线程可以并行运行相同的代码, 考虑到Starfish已经具备了动态插入的功能, 因此在核函数的设计中沿用了传统的cuckoo策略来提高插入/查找的性能. 为了增强子表的容错性, Starfish在每个子表末尾增加了108个 插入过程的核函数的伪代码如算法1所示, 在第2-4行中每个线程从输入的 算法 2. Search伪代码(1) FUNCTION(Queries, Outputs)(2) myKey = Queries[myId];(3) IF myKey is EMPTY THEN RETURN;(4) END IF(5) FOR j in 0 to numFunc do(6) location = hashFunction(constants[i], myKey);(7) KV = table[location];(8) IF getKey[KV] equals myKey THEN(9) Outputs[myId] = getVal[KV];(10) Queries[myId] = EMPTY; RETURN;(11) END IF(12) END FOR(13) Location = SearchInStash(myKey);(14) IF location is valid THEN(15) Outputs[myId] = stash[location];(16) Queries[myId] = EMPTY;(17) RETURN;(18) END IF(19) RETURN;(20) END FUNCTION 查找过程核函数的伪代码如算法2所示, 第2行从输入请求查找数组中取出键, 第5-12行按照候选哈希函数的顺序对键进行单词或多次探测, 若成功命中则将请求查找数组中当前键的位置置空, 以避免接下来在其他子表中对其重复查找. 实验运行环境为Ubuntu 16.09, GPU为NVIDIA P100 12 GB, 代码为C++, 用于测试的数据为随机生成的不重复key的键值对序列. 本节会将Starfish与经典的静态哈希—cudpp-Hash以及经典的动态哈希—SlabHash进行对比, 将Starfish中每个ChildTable的容量设为最高100万个键值对. 正常情况下, 哈希表构建或者插入的时延应该将输入键值对传入显存的时间计算在内, 因此对于Starfish的构建性能评估将会包含数据传输的时间. 由图4可以看出, 在数据量超过500万个键值对时Starfish-x (这里的x代表显存中开辟的空间可容纳x个ChildTable)的性能得到了显著提升, 达到了cudpp-Hash的2倍. 同时可以发现ChildTable数据量(x)逐步增大时, Starfish的性能表现更为优越, 这是因为Child Table数据量越大时, 通过PCI-E进行缓存空间swap的频率越低, 而PCI-E传输相对事务性并行操作开销较大. 图4 构建性能对比 缓存空间(swap)的频率越低, 而PCI-E传输相对事务性并行操作开销较大. 另外, SlabHash-n (n代表平均链表长度)在平均链表长度越大时要进行的平均显存次数也会更大, 所以性能也越低. 静态哈希表在构建过程中还可能发生插入失败后重新构建的情况, 因此只需要与cudpp-Hash进行比较.由图5可以看出, 在数据量超过100万时, Starfish的重新构建性能均超过了cudpp-Hash, 甚至能达到cudpp-Hash的两倍, 这是因为cudpp-Hash在插入失败时需要重新构建整个表, 而Starfish只需要构建当前的ChildTable. 图5 重新构建性能对比 进一步, 本小节对Starfish的并发查找(search)操作的性能进行了评估. 对比系统包括经典的GPU下hash table静态哈希表cudpp-Hash和动态哈希表SlabHash(bucket长度设置为2), 用以评估Starfish的查找性能和并发事务处理性能. 如图6所示, 本文对这两类哈希表和Starfish分别进行了并发查找性能测试, 每种表均由800万个不重复的键值对进行构建. 在显存驻留空间设置为2个ChildTable配置的情况下, Starfish-2在并发查找请求平均分布于第一个子表和前两个子表时, 查找速度显著优于cudpp-Hash和SlabHash, 达到cudpp-Hash的4.7倍和2.6倍. 这是由于Starfish在并发量满足GPU计算局部性的情况下, 只需要对驻留于显存中的子表进行查找, 且在驻留子表中查找所用的开销会远低于在整张静态哈希表(cudpp-Hash)中查找的开销.同时, 在并发查找请求局部性较差时(图6中并发事务达到200万以上), Starfish需要在非驻留子表中进行查找, 因此需要通过PCI-E总线交换子表数据, 在访存和CPU主存间的数据通信过程带来了一定的开销, 因此Starfish的并发事务查找速度略低于cudpp-Hash查找性能一半. 进一步实验验证, Starfish-4与Starfish-2在查找性能上表现相似特征. 考虑到真实业务场景中在对哈希表查找事务的并发性要求着重于提供分布式配置优化, 本文拟将本部分大规模并发性查找事务的性能优化留于未来工作. 图6 并发查找性能对比 对比现有哈希表的GPU并行化工作, Starfish的性能优势之一来源于GPU显存的节约效果显著以及显存资源的充分利用. 因此, 本文将Starfish与cudpp-Hash以及SlabHash进行了显存占用量的对比, 评估中除去了CUDA context的空间, 只关注于哈希表本身. 如图7所示, 在同等输入规模下, SlabHash的显存使用量明显高于Starfish与cudpp-Hash, 因为SlabHash以预分配GPU显存空间机制, 在进行哈希事务操作之前提前占用了所有的GPU显存实现哈希动态化插入策略, 带来了大量的显存资源开销. 而Starfish所占用的显存空间比cudpp-Hash要明显降低, 并且Starfish在设置固定的驻留表数目之后的显存占用量不会随着输入规模的增加而增加, 这也显著地降低了cudpp-Hash以及SlabHash所带来的GPU显存开销. Starfish不仅能够支持高性能的GPU哈希表操作, 而且提供了相对更为节约的GPU显存空间利用, 为大规模哈希表操作在GPU上的并行高性能应用提供了支撑. 图7 显存使用量对比 针对目前GPU静态哈希表面临的可扩展性差以及failure处理代价高昂的问题, 提出了子表技术来应对. 对于动态哈希表面临的性能不佳问题, 提出了在子表技术的基础上, 将子表布局为静态哈希表来提高局部性能的思路. 进而, 为了应对当前GPU显存资源不足的情况, 将子表技术结合页面交换机制, 在保证性能的前提下极大降低了哈希表所占用的显存空间, 并且在保证并发查找局部性的前提下显著提高了查找性能.此外, 具有高可扩展性、高性能以及低显存占用的Starfish哈希表可用于大型数据库、高性能计算中超大模型的局部计算等大数据加速任务当中.4.2 面向局限GPU显存空间的哈希表事务优化

4.3 基于高并发的 Starfish 哈希事务核函数优化
5 实验和结果分析
5.1 实验环境及数据
5.2 哈希表构建性能评估


5.3 哈希表查找性能评估
5.4 低显存性能评估
6 结语
