三角放大型压电陶瓷微纳米驱动机构
2022-09-17胡逸凡章海军倪凯佳
胡逸凡,章海军,倪凯佳
(浙江大学 光电科学与工程学院 现代光学仪器国家重点实验室,杭州 浙江 310027)
1 引言
原子力显微镜(Atomic Force Microscope,AFM)利用探针与样品之间的原子力实现微纳米成像[1],在微纳米技术领域得到了广泛的应用。AFM通常采用由压电陶瓷构成的扫描器实现扫描成像,可获得纳米级乃至亚纳米级的分辨率[2-3];但是压电陶瓷的伸缩量非常微小,即使在直流高压控制下,伸缩量通常也只有自身长度的0.1~0.2%[4-6],因此,常规AFM的扫描范围大多在几微米至十微米量级。虽然通过增加压电陶瓷管的长度、采用叠层式压电陶瓷、提高扫描控制电压等方法可在一定程度上增大扫描范围[7],但同时会带来扫描器体积庞大、扫描精度降低、扫描速度减慢及扫描控制电路要求更高等问题。
为了进一步获得更大或更宽的扫描范围,国内外学者开展了多种结构形式的探索,最常用的方法是将柔性铰链与放大机构相结合实现行程放大[8]。李等提出了一种基于二级杠杆放大机构的单自由度微定位平台[9],通过理论分析与仿真证明了该平台可实现较大范围的输出位移,为设计研发单自由度微定位平台提供了理论基础。闫等采用二级杠杆放大机构,设计了一种压电陶瓷驱动的长行程快刀伺服机构[10],该机构可在实现大输出行程的同时具有较高的固有频率。Ghafarian等提出了一种基于Scott-Russell机构和平行四边形机构的微纳米操作器[11],该机构具有较大的行程和良好的动态性能。Marchesi等提出了一种由杠杆结构和轴对称的柔性梁网格组成的扫描器[12],该扫描器在实现较大扫描范围的同时降低了X向和Y向的耦合位移,可应用于AFM扫描成像中。上述方法各具特点,但是存在结构复杂、加工制作困难、体积庞大、成本高昂以及操作要求严苛等缺点[13-14]。因此,研究发展新型微纳米驱动机构,进而实现更大范围的驱动及扫描,仍然十分必要与迫切。
本文研制了一种基于小压电陶瓷条的三角放大型微纳米驱动机构,由小压电陶瓷条构成对称式伸缩臂,利用大顶角三角形的放大原理,获得了高放大倍率的顶点输出位移,并成功应用在AFM扫描成像中。
2 原理
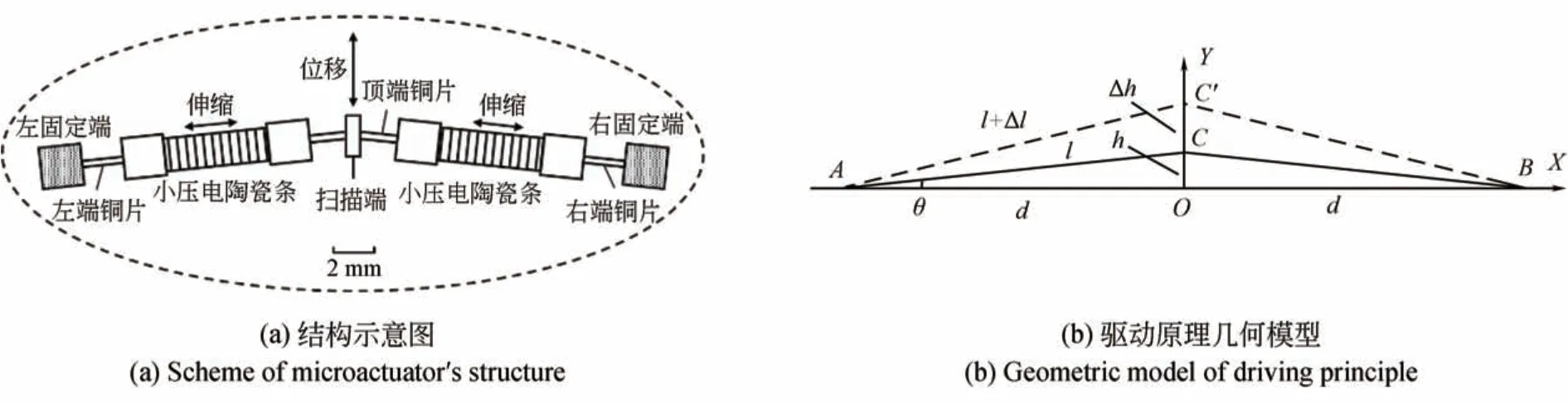
图1 三角放大型压电陶瓷微纳米驱动机构Fig.1 Mini-piezo-element drive microactuator based on triangular amplification
图1(a)所示为基于小压电陶瓷条的三角放大型微纳米驱动机构(以下简称微驱动机构)示意图。该机构采用大顶角的等腰三角形结构,三角形的两条腰作为伸缩臂,每臂由尺寸为1.6 mm×1.6 mm×5.0 mm的小压电陶瓷条及铜片(起到连接及柔性铰链的作用)构成,三角形顶点处由铜片构成的大顶角柔性铰链作为扫描端,机构两侧的固定端与底座(图中虚线部分)固定。图1(b)为微驱动机构的驱动原理几何模型图,△ABC的高为h,腰AC和BC(即伸缩臂)的长度均为l,它们与底边AB(长度2d)的夹角θ为6°。当在小压电陶瓷条上施加驱动电压时,AC和BC沿各自的长度方向伸长,从而使顶点C在高度方向产生放大的位移。
根据直角三角形的几何关系,有:

其中:Δl为伸缩臂的伸长量,Δh为顶点的输出位移。由于Δl≪l,Δh≪h,展开后的二阶小量可以忽略,由式(1)和式(2)得到:

式中η为顶点的位移与伸缩臂的伸缩量之比。由式(4)可知,当θ值很小时,sinθ的值远小于1,因此,与伸缩臂的伸长量相比,C点的输出位移被显著放大。在本文的微驱动机构中,θ=6°,放大比η可达约9.6。
为了进一步验证上述理论模型及微驱动机构的可行性,采用有限元分析软件(COMSOL Multiphysics)开展了仿真研究。仿真的物理场包括压电效应和结构力学两部分,两个伸缩臂之间的铜片采用三棱柱的分割方式,自底面往上扫掠,小压电陶瓷条及其余部分均采用四面体分割。小压电陶瓷条及微驱动机构的主要参数如表1所示。
微驱动机构的纵向(Y方向)位移仿真结果如图2所示。结果表明,微驱动机构在C点处的输出位移可达29.5 μm,而实验测量表明,小压电陶瓷条在80 V控制电压下的伸长量约为3.2 μm,两者之比约为9.2,与理论推导得到的9.6基本一致。
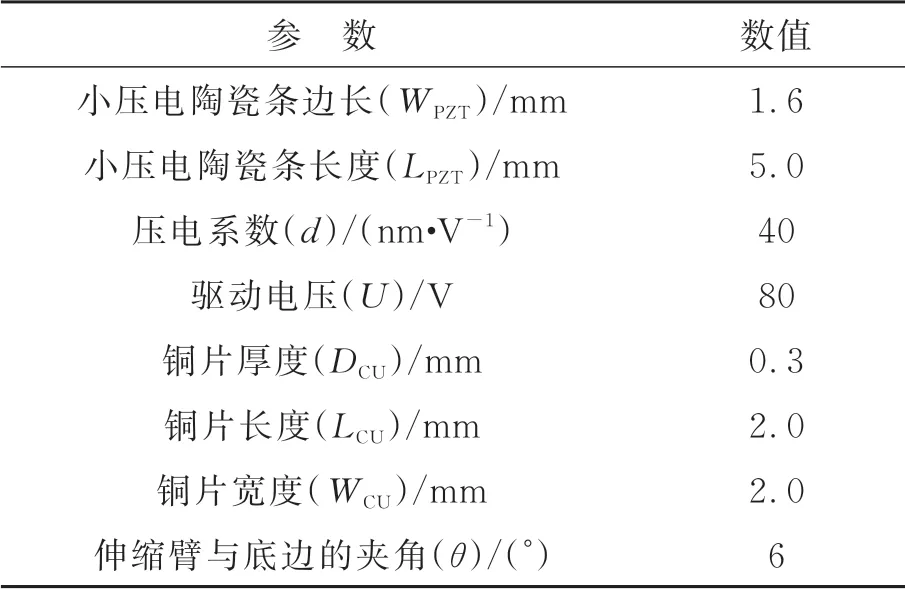
表1 小压电陶瓷条及微驱动机构的主要参数Tab.1 Main parameters of mini-piezo-element and microactuator
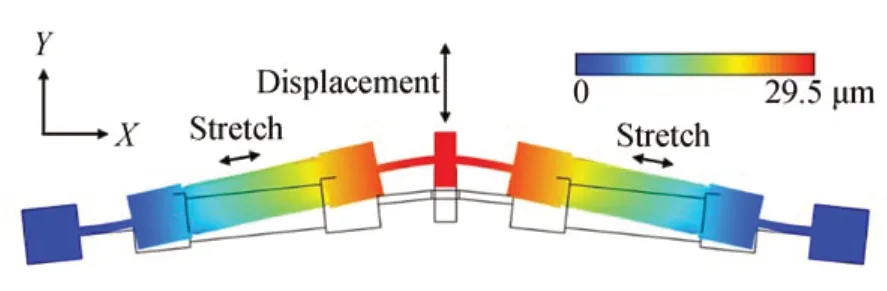
图2 微驱动机构纵向(Y方向)位移的COMSOL仿真结果Fig.2 COMSOL simulation results of microactuator’s vertical(Y direction)displacement
3 实验及结果
3.1 微驱动机构的制作
参照图1(a)所示的设计图和表1所示参数,制作了基于小压电陶瓷条的三角放大型微纳米驱动机构。第一步,选取厚度为0.3 mm的铜箔,裁剪出长度为5 mm的顶端铜片,参照量角器将铜片弯折成约168°的顶角,再将其两端分与左右两侧小压电陶瓷条的一端对准,用502胶水快速固定。第二步,裁剪出长度为2 mm的左端铜片和右端铜片,将左端铜片一端与左侧小压电陶瓷条的另一端对准,用502胶水固定,再将铜片另一端与左侧的长方体铝块(2 mm×2 mm×3 mm,外协加工所得)对准,并用胶水固定;同样方法固定右端铜片与右侧长方体铝块。第三步,将制作好的构件置于一个厚1 mm、直径为35 mm的有机玻璃片上,并用502胶水将两侧铝块底面固定在有机玻璃片上,作为左、右固定端。第四步,裁剪出一片1 mm×2 mm的铜片,用镊子将其轻轻放置于顶端铜片顶角处,并用胶水固定,作为扫描端。第五步,为提高机构的可靠性,进一步采用紫外胶点胶各连接处,再用紫外LED照射固化,至此,微驱动机构制作完成。
3.2 微驱动机构的显微运动测量
通过实验对微驱动机构的显微运动进行测量,图3(a)为实验测量装置示意图,借助安装在微驱动机构上的AFM微探针(微悬臂),间接测量微驱动机构的显微运动。为表示清晰起见,图中的微驱动机构及AFM微探针均未按比例绘制;微探针(微悬臂)旋转90°绘制,实际取向垂直于纸面,即与微驱动机构的运动方向一致。采用Nikon 80i型光学显微镜及LU Plan 100×显微物镜与DS-Fi2型CCD摄像头,拍摄AFM微悬臂的显微运动视频并保存至计算机。利用自行开发的基于亚像素拟合的显微运动测量软件[15],测量微悬臂右上侧角点M(方框中心点)的运动,如图3(b)所示。将幅值为80 V的锯齿波扫描电压施加在小压电陶瓷条上,实验测得M点的扫描运动曲线(一个周期),如图3(c)所示。
实验曲线表明,微驱动机构扫描端的最大位移为26.6 μm,与小压电陶瓷条的3.2 μm伸长量相比,实际放大倍数约为8.3,略小于理论计算值及仿真值。在理论推导过程中,将微驱动机构作为理想刚体;将伸缩臂与底边的夹角θ精确取值为6°;将压电系数与电压的乘积直接作为压电陶瓷的伸缩量。而在实际应用中,铜片与小压电陶瓷条、固定端的连接处可能产生微小的弹性变形,因此不能将伸缩臂当作理想刚体;夹角θ也可能与6°有一定的偏差;此外,由于压电陶瓷的非线性等原因,其伸缩量并不严格等于压电系数与电压的乘积。这些因素造成理论值与实际值之间存在少量偏差,即实际值略小于理论值,对微驱动机构的性能不会造成影响。图3(c)表明,微驱动机构的实际扫描运动曲线呈现较好的线性,为实际应用提供了良好基础。

图3 借助AFM微悬臂/微探针测量微驱动机构显微运动实验Fig.3 Micro-motion measurement experiment of microactuator using AFM cantilever/tip
3.3 利用微驱动机构的宽范围AFM扫描成像
将本文研发的微驱动机构应用于AFM,开展了宽范围AFM扫描成像实验。图4所示为新构建 的AFM探头 示 意 图,其 中,PX和PZ为 原 有的管状压电陶瓷,分别实现快轴(X轴)扫描与Z向反馈控制;用微驱动机构替代原有的PY管状压电陶瓷(图中旋转90°绘制),实现慢轴(Y轴)扫描。
在测量实验中,只是借助于安装在微驱动机构上的AFM微探针(微悬臂),间接实现微驱动机构的显微运动测量。在扫描成像实验中,将样品(纳米压印结构)安装在微驱动机构上实现宽范围扫描,而AFM微探针(型号为PNP-TR-Au)固定,在等高模式下扫描获得的AFM图像如图5所示。实验结果表明,由此构建的AFM系统的扫描范围达到4 μm×26 μm,即采用由小压电陶瓷条构成的微驱动机构,将慢轴扫描范围从PY压电陶瓷管的4 μm拓展为26 μm,与显微运动测量结果基本吻合。图5中纳米压印结构排列规整、结构清晰,说明作为慢轴扫描器的微驱动机构能够保证良好的线性度、清晰度与对比度;同时,在纳米压印结构之间的基底上,还可以清晰地发现分布着许多更细小的颗粒,尺寸大多在纳米量级,进一步说明微驱动机构在拓宽扫描范围的同时,能够保证纳米级的分辨率。
需要强调的是,构建AFM慢轴扫描器的微驱动机构的每条伸缩臂仅包含1个小压电陶瓷条(每个价格仅为十几元),实验中最大扫描控制电压仅为80 V,而原有的PX和PZ压电陶瓷管的扫描与反馈控制电压最大需要310 V左右,因此,微驱动机构可以用更低的扫描控制电压获得更宽的扫描范围。增加伸缩臂中小压电陶瓷条的数量,同时适当增大控制电压,微驱动机构的输出位移成倍增加,从而获得更宽的扫描范围。考虑到伸缩臂刚度变化的影响,输出位移的增加倍数可能会略小于预计值。
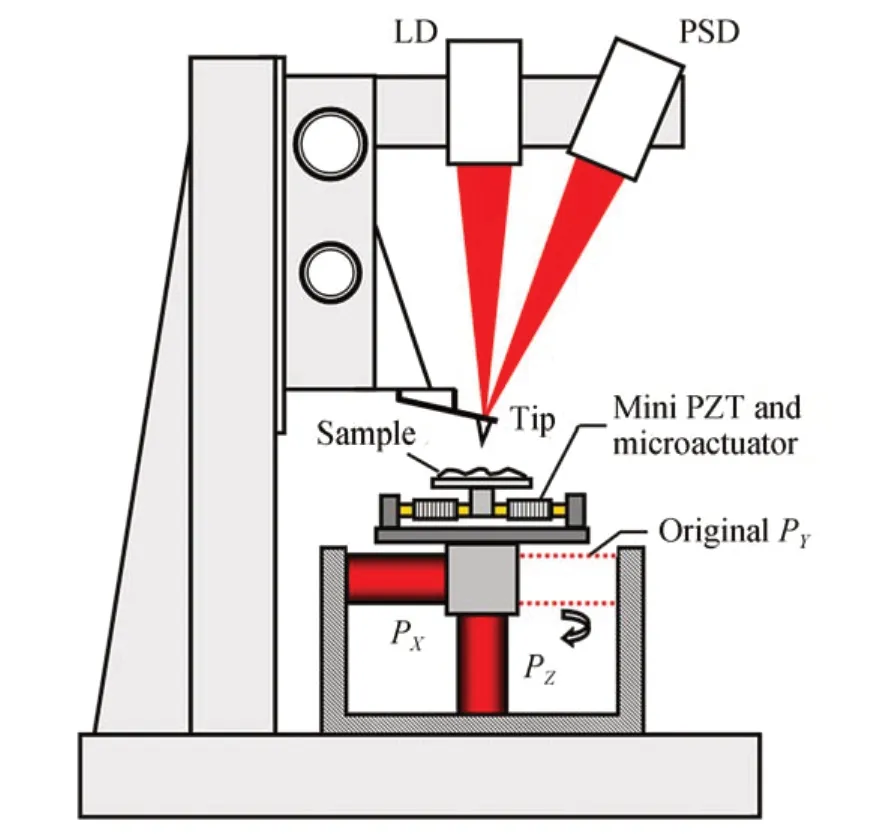
图4 AFM探头及新型XYZ扫描控制器示意图Fig.4 Schematic diagram of AFM probe and its XYZ scanning controller

图5 利用基于微驱动机构的新型扫描控制器获得的纳米压印结构的AFM图像(纵向为快轴方向,横向为慢轴方向)Fig.5 AFM image of nano-imprint structure obtained by novel scanning controller utilizing microactuator(vertical direction of the image is defined as fast axis and horizontal direction as slow axis)
4 结论
本文提出了一种基于小压电陶瓷条的三角放大型微纳米驱动机构,建立了相应的几何模型,对大顶角三角形的放大原理进行了理论分析。仿真结果表明,在80 V的驱动电压下,扫描端的输出位移理论值为29.5 μm,与小压电陶瓷条的伸缩量之比(放大比)可达9.2。实验结果表明,在相同的驱动电压下,扫描端的实际输出位移为26.6 μm,实际位移放大倍数约为8.3,略小于理论值。为进一步验证微驱动机构的性能,将它作为慢轴扫描器构建新的AFM探头,扫描获得了4 μm×26 μm的AFM图像,将慢轴扫描范围从原压电陶瓷管的4 μm拓展到26 μm,成功实现了宽范围的AFM扫描成像,并且具有良好的分辨率、线性度与对比度。基于小压电陶瓷条的三角放大型微纳米驱动机构具有原理新颖、结构简洁、成本低廉和性能优越等特点,有望在光学、精密机械及微纳米技术领域得到广泛的应用。
