和/差波束雷达成像及目标精确测角技术
2022-09-15张继龙张继康
王 栋, 张继龙, 张继康
(1. 北京敏视达雷达有限公司, 北京 100094;2. 苏州威陌电子信息科技有限公司, 江苏 苏州 215312;3. 中企基业(北京)管理顾问有限公司, 北京 100039)
0 引 言
随着雷达技术的进步,现代雷达越来越多地采用数字体制,数字阵列雷达具有更灵活的性能和可扩展性。在数字阵列雷达中,数字波束合成技术(Digital Beam Forming,DBF)[1-10]得到了广泛应用,通过采用数字波束合成技术,数字阵列雷达可实现接收多波束和自适应抗干扰。但数字波束合成技术对硬件运算资源的要求较高,合成的波束越多,所需要的硬件运算资源越多。在传统数字波束合成雷达中,波束数量与运算资源需求是一对矛盾,要实现大空域覆盖,需要合成更多的波束数量,而运算资源的需求与波束数量之间呈近似正比例关系,特别是对于针状波束的高精度雷达,合成覆盖全空域的波束,则需要海量的硬件运算资源。
虚拟透镜成像技术[11-15]是一种新型高效快速成像技术,具有速度快、效率高、兼容性好的特点,并且采用快速傅里叶变换(Fast Fourier Transform, FFT)大幅降低了对硬件运算资源的需求。该技术通过模拟透镜成像机制,对阵列单元信号进行复杂的运算和处理,从而直接得出目标的像。其中,文献[14]给出了一种快速成像实现方法,极大地降低了算法复杂度,运用此技术可以提高雷达系统的目标探测能力和抗干扰能力,从而大幅提升雷达系统的综合性能。
本文通过对虚拟透镜成像技术的研究,提出了一种雷达和/差波束快速成像方法,使用和波束成像进行目标检测,使用差波束成像进行精确测角,能够实现对大空域目标的快速检测和角坐标测量。此外,根据虚拟透镜成像技术,提出了一种和/差波束方向图合成新方法,能够快速获得所需方向图并具有良好的低副瓣特性。最后进行了成像和目标检测仿真验证,仿真结果证明了本文方法的有效性。
1 虚拟透镜成像技术
文献[14]给出了虚拟透镜成像算法的快速实现方式:
Eq(ωδ,ωσ)=IFFT(E·A·ejφFejφS)
(1)
式中:Eq为目标的像;E为阵列单元接收到的场;A为阵列单元的幅度加权系数;φF为聚焦相位系数;φS为扫描相位加权系数。快速傅里叶逆变换(Inverse Fast Fourier Transform, IFFT)计算结果对应的ωδ、ωσ取值范围为:ωδ∈[0,2,π]、ωσ∈[0,2,π],进行fftshift运算后将ωδ、ωσ取值范围变换为:ωδ∈[-π,π]、ωσ∈[-π,π],此时的像才是符合实际分布的像。
文献[14]给出了修正后的像点角坐标变换公式为
(2)
对于均匀分布的常规相控阵平面阵列,文献[15]给出了一种优化后的配相公式为
(3)
式中:k为波数;R为目标斜距;(x,y)为阵列单元坐标;m、n分别为阵列单元序号;Δφx=kΔxsinθζ,Δφy=kΔysinθξ;θζ、θξ为成像视角中心;Δx、Δy分别为x、y方向的阵列单元间距。
在实际雷达应用中,目标通常位于阵列天线的远场区域,此时有φF≈0。因而成像公式可以进一步简化为
Eq(ωδ,ωσ)=IFFT(E·A·ejφS)
(4)
当选取ωδ=0、ωσ=0,成像公式(4)便简化为传统多通道相控阵雷达目标回波计算公式,为
(5)
采用上述成像技术,相控阵雷达能够通过一次成像运算获得宽视角范围内的目标信息,进而获得远高于DBF的目标探测效率。
2 和/差波束成像
在成像公式(4)中,将幅度加权系数A进一步拓展为和波束方向图对应的复加权系数A∑以及差波束方向图对应的复加权系数AΔ,即可得出和/差波束成像公式为
(6)
为了保持较高的成像分辨率,和波束通常选择针状波束,此时具有较高的和波束增益和较窄的波束宽度,有利于目标的检测与分辨。
在和波束成像的基础上,采用恒虚警法进行目标检测,进而进行差波束成像,可精确测定目标的角度坐标。在差波束成像时,需要选择合适的差波束方向图,以保证较高的差波束增益以及较深的差波束零陷。
在和差波束成像的基础上,对成像结果进行拓展处理,可进一步提高成像分辨率:
(7)
采用这种和差波束共同成像技术,可以显著提升成像分辨率,有利于区别和识别目标的局部特征。
3 和/差波束方向图快速合成
阵面对称反相配相是一种常见的差波束形成方法,即在和波束配相的基础上,将阵面分为对称的两部分,对另一半阵面进行反相配相,采用此方法可便捷地获得差波束方向图。典型的反相配相阵面幅度、相位分布以及差波束方向图见图1。

图1 阵面反相配相及其方向图
阵面反相配相法获得的差波束方向图通常增益较低且副瓣电平较高,用于成像时会形成较高的成像底噪,进而影响目标检测。
对于复杂的阵列方向图综合,通常可采用各种不同的优化方法进行,但大部分方法都是基于迭代方法[16-22],运算较为耗时。
由阵列天线理论可知,对阵面复场分布进行二维IFFT变换即可获得其远场方向图。而文献[13]的成像理论则证明,对阵面复信号进行二维IFFT变换,其结果即为目标的像,综合二者可知,远场方向图与目标的像之间存在一定的对应关系。根据上述理论,对于复杂形状的阵列方向图,用一系列不同强度、不同入射方向、不同初始相位的平面波进行照射和叠加,可获得所需的方向图对应的阵面复场分布,即:
G=∑(Gi)=∑[IFFT(Ai)]
(8)
式中:G为总方向图;Gi为单个照射平面波对应的方向图;Ai为单个平面波照射形成的阵面复场分布。根据傅里叶变换的线性性质,式(8)可改写为
G=IFFT(∑Ai)
(9)
式(9)表明,总方向图可由不同平面波照射叠加后的阵面复场分布进行求解。
根据阵列天线的和波束宽度,将复杂方向图离散化为间隔半功率波束宽度的点目标集合,每个点目标代表了一个照射平面波,从而可获得照射平面波集合{(φ,θ,σ,φ)},其中,(φ,θ)代表平面波入射方向的球坐标,σ代表入射平面波强度,φ代表入射平面波初始相位。在无特殊要求的情况下,照射平面波的初始相位可默认为零。若两个相邻的点目标之间需要有零陷,则需要设置对应的两个相邻照射平面波的相位差为180°。
根据照射平面波的入射球坐标(φ,θ),进行坐标变换,转换为方位角、俯仰角坐标(θx,θy),从而可获得平面波到达阵列口径处的相位为
ψmn=mΔφx+nΔφy
(10)
式中:m、n为阵列单元的序号;Δφx、Δφy分别为x、y方向的阵列相邻单元之间的相位差,其计算公式分别为
(11)
总方向图对应的阵面复场分布为
A=∑[σi·ej(ψi+φi)]
(12)
合成差波束方向图时,仅需要设置2个平面波照射源,根据差波束零深选择合适的夹角,并且设置两个平面波照射源的初始相位相差180°。
图2给出了新方法差波束阵面幅度、相位分布及差波束方向图结果。仿真条件为:频率60 GHz,单元间距半波长,阵列规模100×100,照射平面波源的夹角为1.8°。由仿真结果可知,采用成像法获得的差波束方向图具有更低的副瓣电平。

图2 低旁瓣差波束方向图合成
4 和/差波束成像与目标检测仿真
文献[15]已证明,虚拟透镜成像技术是一种兼容远、中、近不同距离的成像新技术,下面分别进行近距离和远距离情况下的和差波束成像仿真。
首先进行近距离和差波束成像仿真。目标模型为“十”字形金属物体,如图3(a)所示,条状金属长0.8 m,宽2 cm,目标位于阵列法线上,距离阵列中心10 m,阵列孔径为2 m×2 m,单元间距为λ/2,照射平面波频率为10 GHz。用电磁仿真软件进行全波仿真,获得目标的散射场数据,然后编写程序进行成像计算。图3给出了和波束像、差波束像以及合成的高分辨像。

图3 目标模型及和差波束成像结果
随后进行远距离成像仿真。仿真条件为:接收天线阵列为直径0.23 m的圆阵,单元间距为半波长,工作频率60 GHz,设置5个不同方向的远距离理想点源目标(干扰)。干信比取值30 dB,信噪比取值10 dB。目标(干扰)的坐标、强度见表1。
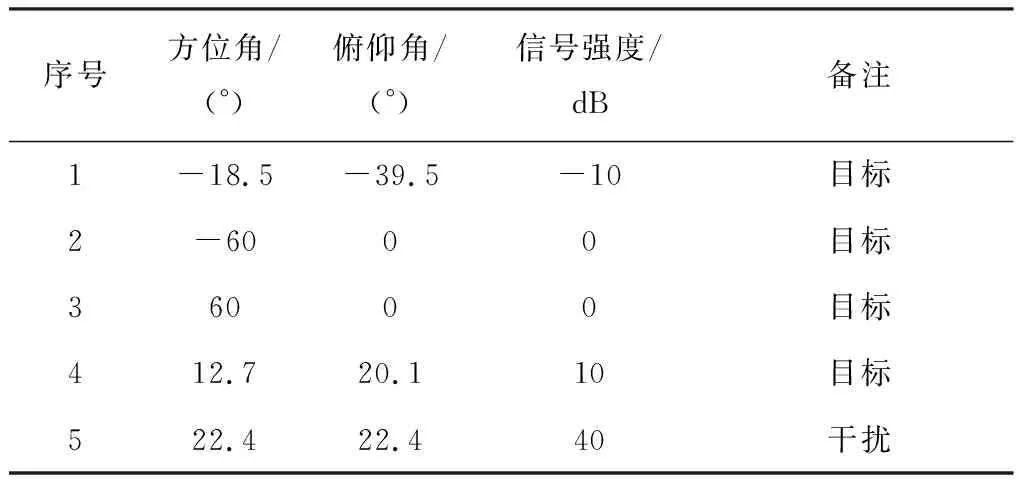
表1 目标(干扰)坐标及信号强度
仿真结果表明,当天线阵列接收到方向不同、强度不同的多个远距离目标(干扰)信号时,采用公式(6)所示成像算法,进行和/差波束成像能够实现快速检测目标和角坐标测量,仿真结果如图4所示。

图4 和/差波束成像
用差波束零陷对应的角度作为目标角坐标,进行100次蒙特卡洛仿真,仿真结果见图5。仿真结果表明,采用快速成像方法进行目标检测与坐标测量,具有较好的检测效果与角度坐标测量准确度。
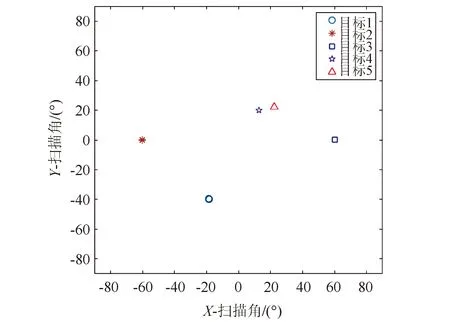
图5 和/差波束成像目标检测仿真结果
5 结 语
虚拟透镜成像技术是一种新型高效快速成像技术,本文在该技术基础上,提出了一种和/差波束雷达快速成像方法,分别采用和、差波束实现目标快速检测与精确测角。此外,根据虚拟透镜成像技术,提出了一种新的阵列方向图合成方法,能够快速获得所需方向图并具有良好的低副瓣特性,仿真结果验证了所提方法的有效性。
