基于识别距离的红外成像仿真验证方法
2022-09-13郭冰涛张卫国
郭冰涛,韩 琪,惠 进,张卫国
(西安应用光学研究所,陕西 西安 710065)
引言
随着红外成像技术的发展和应用,红外系统成像仿真技术越来越受到重视。目前,红外系统成像仿真技术已广泛应用于指导红外成像系统设计[1-2]。高仿真置信度能够确保红外成像系统仿真技术得以发挥其迭代速度快、研发成本低的优势。因此,开展红外系统成像仿真模型验证方法研究具有十分重要的意义和应用价值。
目前,红外系统成像仿真模型验证的主要方式是对比红外系统成像仿真模型和实际的成像传感器的性能特征参数,或是特征性能曲线(如信噪比、分辨率、成像像素等)之间的差异[3-6]。还有一部分学者提出了通过对比仿真图像和实测图像的图像特征(如直方图,对比度,信息熵等)对仿真模型准确度进行评价[7-8]。
现有研究成果为红外成像仿真技术发展做出了巨大的贡献,但是仍存在一定的问题。在红外系统成像仿真模型验证过程中,需要考评仿真图像在灰度分布、信噪比、分辨率、成像大小等方面的准确性。如果红外图像用于人眼观测,还需要考评人眼视觉对仿真图像和实测图像的判别能力的差异。如果红外图像用于机器视觉,如自动识别、自动跟踪,还需要考评机器视觉对仿真图像和实测图像的判别能力的差异。需要指出的是,本文仅考虑红外图像是给人看的这一情况。然而,现有的红外成像仿真模型评价方法都没有考虑人眼视觉对仿真图像和实测图像的判别能力的差异。
针对上述问题,本文提出了一种基于识别距离的红外系统成像仿真模型验证方法。以识别距离作为红外系统成像仿真模型的准确度评价因子,不仅可以考评仿真图像与实测图像在灰度分布、信噪比、分辨率、成像大小等方面的综合差异,还可以考评人眼视觉对仿真图像和实测图像的判别能力的差异。
1 基于作战效能的红外系统成像仿真模型验证方法
高仿真置信度是确保红外成像系统仿真模型得以发挥其迭代速度快、研发成本低的优势所在。目前,作者所在团队已经提出一种利用实测图像实现红外系统成像仿真方法[9-10]。现需要针对仿真模型进行验证。
在红外系统成像仿真过程中,需考虑图像灰度分布、信噪比、分辨率、成像大小等因素。除此之外,还应该考虑人眼视觉对图像的判读能力。即使仿真图像与实测图像在灰度分布、信噪比、分辨率、成像大小等方面完全一致,人眼对仿真图像与实测图像的判读结果(如识别距离、探测概率)也有可能不一致[11-12]。图1(a)为实测红外图像,来自文献[5]。图1(b)为“仿真”图像。假设“仿真”图像与实测图像的差异只是一部分目标区域位置不同,如图1(c)所示。这样,图1(a)和图1(b)在灰度分布、信噪比、分辨率、成像大小等方面完全一致,如果用现有评价方法的话,该“仿真”方法准确度为100%。但是,显然这种评价结果是令人难以置信的,因为对人眼判读来说,图1(a)和图1(b)在目标区域的差异非常大。
红外系统的作战效能(如识别距离、发现概率等)与图像灰度分布、信噪比、分辨率、成像大小等各种因素有关,而且能够反映人眼视觉对图像的判读能力[13-14]。目前,红外系统常用的作战效能指标主要是识别距离/概率、发现距离/概率[15]。如果以发现概率或距离做为红外成像仿真模型验证因子,仅能评价仿真结果在图像灰度分布、信噪比、分辨率、成像大小、人眼视觉判读等的准确度,很难体现目标位置、形状仿真结果的准确度。而利用识别距离/概率评价仿真结果则不存在这一问题。本文将利用识别距离实现红外系统成像仿真模型验证,具体方法如图2 所示。

图 1 红外图像仿真效果验证示例Fig.1 Example of simulation effect validation for infrared images

图 2 红外系统成像仿真模型验证方法Fig.2 Validation method of simulation model for infrared system imaging
步骤1:考虑系统的作战效能受目标背景的辐射、大气传输、系统信号响应、空间传递函数MTF、噪声等各因素对系统性能的综合影响,需要设计不同大小、形状、温差的黑体靶标,并放置在不同距离处;
步骤2:利用红外系统对黑体靶标进行成像,并选择多名观察人员对图像判读,统计判读结果期望值和方差;
步骤3:通过黑体靶标辐射计算、红外系统成像仿真模型计算,实现红外图像仿真,并让上述观察人员对图像判读,统计判读结果期望值和方差;
步骤4:将步骤2 和步骤3 统计结果进行对比,计算红外系统成像仿真模型置信度。
2 红外系统成像仿真模型的验证评价指标
为实现对红外成像仿真模型进行综合评价,必须对指标进行合理的选择,且评价指标得到的结果应与人类视觉感受相符。本文通过设计不同形状、尺寸、温差(总计X个)的靶标进行试验。
1)实物试验
每次试验开始前记录系统状态(包括焦距、观测方向、位置等)、环境条件(包括空气湿度、风速等)、靶标位置等。
利用红外系统对靶标进行成像,并采集红外图像。组织N名观察员进行判读:当靶标处于某一位置,观察员恰好能够从采集图像中识别出靶标形状,即增大靶标与红外系统之间的距离,观察员无法识别靶标形状时,记录观察员对靶标的识别距离。
对多名观察员的试验结果统计平均值,得到系统对靶标的识别距离。
针对每一个靶标进行试验,得到系统对每一个靶标的识别距离R10,R20,...,RX0。
2)仿真试验
将实物试验记录的系统状态、环境条件、靶标位置等信息录入仿真模型,并利用红外系统成像仿真模型对靶标进行成像仿真。
针对每一个靶标的成像仿真图像,参考实物试验方式,组织多名观察员进行判读,并记录系统对每一个靶标的识别距离R11,R21,...,RX1。
3)红外系统成像仿真模型的验证
根据实物试验结果和仿真试验结果,计算每一组试验结果的相对误差Δi。例如,针对第1 组靶标,仿真结果相对误差为

根据每一组试验结果的相对误差,计算红外系统成像仿真模型的准确度η:

3 试验与结果分析
1)试验用红外系统介绍
利用上述方法,针对红外系统成像仿真方法[9-10]开展了验证试验。试验中用到的红外成像系统为GUIDE MODEL No.:IR928+红外成像系统,具体系统参数如表1 所示。
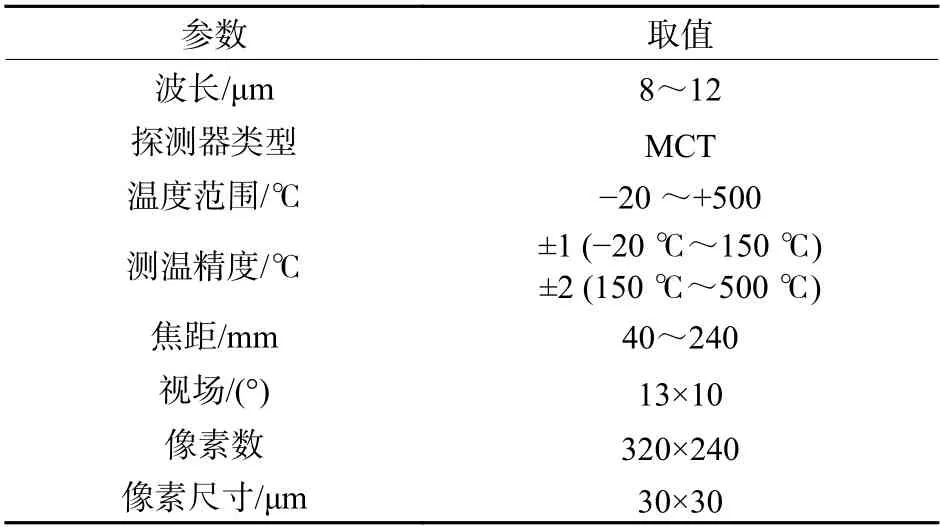
表 1 试验用红外成像系统参数Table 1 Parameters of infrared imaging system for test
2)靶标及热源
在试验过程中,红外成像系统需要对靶标成像。为了准确控制靶标温差,采用黑体控制靶标温度,具体实现方法如图3 所示。在厚纸板上制作靶标形状,并将靶标区域镂空。将厚纸板紧贴黑体,并将靶标置于黑体窗口中心位置。通过调节靶标温度,可实现靶标温度精确控制。
实验过程中,设计4 种形状靶标,每种形状靶标设计有3 种尺寸,如图4 所示。其中,正方形目标A1、A2、A3的边长分别为10 mm、20 mm、40 mm;三角形目标B1、B2、B3为等边三角形,边长分别为10 mm、20 mm、40 mm;半圆形目标C1、C2、C3半径分别为5 mm、10 mm、20 mm;梯形目标D1、D2、D3上底边长分别为5 mm、10 mm、20 mm,下底边长和高相同,分别为10 mm、20 mm、40 mm。

图 3 靶标设计示意图Fig.3 Schematic diagram of target design

3)图像采集结果

图 4 不同尺寸、形状的靶标示意图Fig.4 Schematic of target with different sizes and shapes
根据上述试验流程,本文通过设置不同靶标温度(26.0 ℃、34.0 ℃和42.0 ℃),开展了多次试验。图5 为红外热像仪对不同靶标(A1~D3)在靶标温度300.7 K 时,图像采集结果。

图 5 靶标温度为26.0 ℃时系统图像采集结果Fig.5 Results of system image acquisition at target temperature of 26.0 ℃
根据每一个靶标的采集红外图像。组织10 名观察员进行判读:当靶标处于某一位置,观察员恰好能够从采集图像中识别出靶标形状,即增大靶标与红外系统之间的距离,观察员无法识别靶标形状时,记录观察员对靶标的识别距离。结果如图6~图8 所示。

图 6 靶标温度26.0 ℃时观测员对红外系统识别距离实物试验测试结果Fig.6 Test results of infrared system recognition range of each observer at target temperature of 26.0 ℃ from measured images

图 7 靶标温度34.0 ℃时观测员对红外系统识别距离实物试验测试结果Fig.7 Test results of infrared system recognition range of each observer at target temperature of 34.0 ℃ from measured images

图 8 靶标温度42.0 ℃时观测员对红外系统识别距离实物试验测试结果Fig.8 Test results of infrared system recognition range of each observer at target temperature of 42.0 ℃ from measured images
针对多名观察员的试验结果,统计平均值,得到系统对靶标的识别距离,结果如表2 所示。

表 2 红外系统对靶标的识别距离实物试验统计结果Table 2 Statistical results of infrared system recognition range for targets
4)红外系统成像仿真结果
将实物试验记录的系统状态、环境条件、靶标位置等信息录入红外系统成像仿真模型,并利用红外系统成像仿真模型对靶标区域进行成像仿真。根据上述试验流程,本文通过设置不同靶标温度(26.0 ℃、34.0 ℃和42.0 ℃),开展了多次试验。图9 为对不同靶标(A1~D3)在靶标温度26.0 ℃时,红外热像仪成像仿真结果。
根据每一个靶标的红外仿真图像,组织与实物试验相同的10 名观察员进行判读:当靶标处于某一位置,观察员恰好能够从采集图像中识别出靶标形状,即增大靶标与红外系统之间的距离,观察员无法识别靶标形状时,记录观察员对靶标的识别距离。结果如图10~图12 所示。

图 9 靶标温度为26.0 ℃时红外系统成像仿真结果Fig.9 Simulation results of infrared system imaging at target temperature of 26.0 ℃

图 10 靶标温度26.0 ℃时观测员对红外系统识别距离仿真试验测试结果Fig.10 Simulation test results of infrared system recognition range of each observer at target temperature of 26.0 ℃ from simulated images

图 11 靶标温度34.0 ℃时观测员对红外系统识别距离仿真试验测试结果Fig.11 Simulation test results of infrared system recognition range of each observer at target temperature of 34.0 ℃ from simulated images
针对多名观察员的试验结果,统计平均值,得到系统对靶标的识别距离,结果如表3所示。
5)红外系统成像仿真模型准确度分析
根据实物试验结果和仿真试验结果,计算每一组试验结果的相对误差。根据每一组试验结果的相对误差,可计算红外系统成像仿真模型的准确度,结果如表4 所示。

表 3 红外系统对靶标的识别距离仿真试验统计结果Table 3 Statistical results of simulation test of infrared system recognition range for targets

表 4 红外系统成像仿真模型相对误差统计Table 4 Relative errors statistics of imaging simulation model of infrared system
综合考虑仿真图像与实测图像在灰度分布、信噪比、分辨率、成像大小、人眼判读能力等多个方面的差异,根据每一组试验结果的相对误差,红外系统成像仿真模型的准确度η=1-10.49%=89.51%。
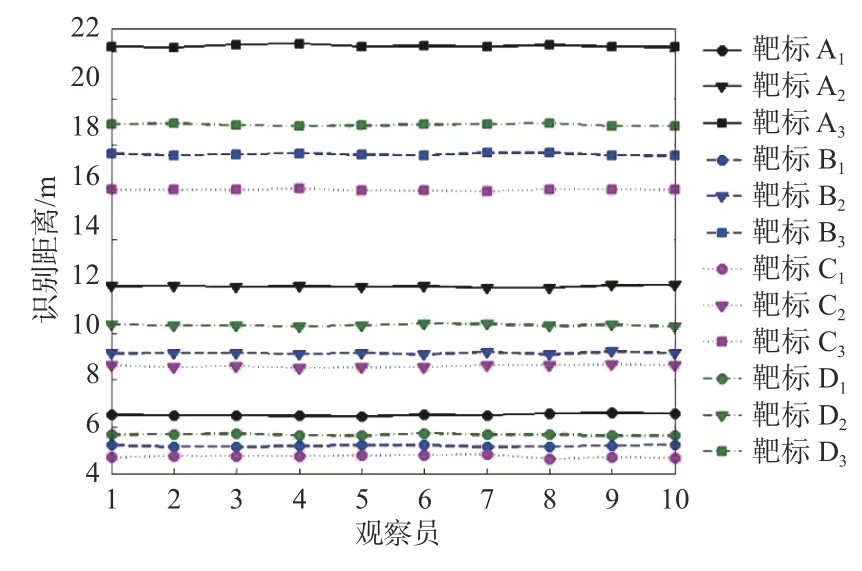
图 12 靶标温度42.0 ℃时观测员对红外系统识别距离仿真试验测试结果Fig.12 Simulation test results of infrared system recognition range of each observer at target temperature of 42.0 ℃ from simulated images
4 结论
针对现有红外成像仿真验证方法未考虑人眼视觉的影响这一问题,提出了基于识别距离的红外系统成像仿真模型验证方法。以识别距离作为红外系统成像仿真模型的准确度评价因子,可以考评仿真图像与实测图像在灰度分布、信噪比、分辨率、成像大小、人眼视觉等方面的综合差异,考虑的因素更多更全面。试验结果表明,本文提出的验证方法结果更符合客观事实。然而,该方法受人的主观因素影响较大,针对这一问题,下一步工作将进一步结合人眼视觉感知机理,研究基于人眼视觉感知的红外成像仿真验证方法。此外,本文仅考虑了静态场景,未开展平台运动或目标运动情况下的红外成像仿真验证工作,这将是后续工作重点。
