基于改进遗传蜂群算法的武器系统优化部署问题研究
2022-09-13岳韶华
岳韶华,何 晟,王 刚,刘 伟,陈 晨
(1.空军工程大学 防空反导学院, 西安 710051; 2.空军工程大学 研究生院, 西安 710051; 3.中国人民解放军63768部队, 西安 710600; 4.西安卫星测控中心, 西安 710043)
1 引言
弹道导弹突击已成为现代战争中实施远程精确打击的重要手段,具有速度快、威力大、打击精度高、突防能力强等特点,给现代防空带来了前所未有的挑战,促使区域防空向大区域防空转变。针对我方重点保卫目标区域、特定的来袭方向以及特定的来袭目标相关参数,对武器系统进行合理的配置和优化部署,制定科学合理、安全高效的优化部署策略,一直是该领域关注的重要课题,将直接影响作战效能,具有重要的现实意义和紧迫的军事需求。
本文在某想定背景下,将发射弧段、拦截弧段作为主要部署依据,首先根据数形结合理论,建立目标拦截能力计算模型[1],计算出每个武器系统针对不同来袭目标的拦截能力。在此基础上综合考虑武器系统的拦截过程、杀伤空域,对子目标进行加权分析,得到了整体拦截能力优化模型,再采用改进遗传蜂群算法进行分析,得到了考虑对各个目标保卫能力相对均衡性的合理可靠的优化部署方案。
2 武器系统优化部署模型基本概念
在实际战场环境中,发射弧段和拦截弧段是衡量武器系统拦截能力的重要指标,目标在该弧段上飞行的时间越长,战勤人员的操作空间越大,拦截成功率也越高。发射弧段、拦截弧段与反导武器系统的部署位置、探测跟踪能力、雷达扇区角度、拦截弹飞行速度以及杀伤空域等密切关联,以此可以设定武器系统的拦截模型[2]。将该模型得到的结果与想定的来袭弹道导弹运动参数信息相结合,可以得到武器系统对来袭目标的拦截能力评估模型。在尽可能提升整体拦截能力的同时,还需要考虑保卫各个目标的能力相对均衡,即部署位置的选择要让武器系统对来袭目标的拦截窗口尽可能大、纵深尽可能长且对每个来袭方向拦截能力尽可能均衡[3]。需合考虑整体拦截能力最大和均匀部署,构成武器系统部署目标函数,在此基础上,利用改进的遗传蜂群遗传算法对其中变量进行寻优处理,在预先堪选阵地位置中,寻求最优部署配置方案。
当选择某种配置部署方案后,各武器系统部署位置、雷达法线方向、对来袭目标的拦截弧长、发射弧长及发射拦截过程可确定,能计算得到该武器部署距离纵深、雷达法线方向偏离度和武器系统部署均匀度[4]。结合实际情况,在选取部署方案时主要根据整体拦截窗口与火力分布均匀性,因此本模型选取距离纵深、雷达法线方向偏离度与武器系统部署均匀度作为3个主要属性值。
武器系统部署距离纵深指武器系统针对来袭目标来袭方向,且对目标形成拦截能力的保卫目标—远界距离与保卫目标—近界距离之差。雷达法线方向偏离度指武器系统的雷达法线方向相对于目标来袭方向的夹角。武器系统部署均匀度为基于来袭目标在来袭方向上穿过所有武器系统杀伤区航迹长度构建的武器系统部署均匀性指标。
3 武器系统优化部署模型
对于具有n个决策变量,m个目标变量的多目标优化问题,可描述为
max(min)f(x)=(f1(x),f2(x),…,fm(x))
s.t.gi(x)≤0,i=1,2,…,G
hi(x)=0,j=1,2,…,H
(1)
式中:x为n维决策变量;f(x)为m维目标矢量,是由决策空间向目标空间映射的函数;gi(x)≤0,i=1,2,…,G定义了G个不等式约束;hi(x)=0,j=1,2,…,H定义了H个等式约束,由所有可行解组成的集合,记为Xi。
基于选取的武器系统部署距离纵深、雷达法线方向偏离度与武器系统部署均匀度作为3个主要属性值,建立的综合评估模型的目标函数如下:
(2)
式中:F为部署方案的综合目标函数,F值越小,则说明该方案越优;F1、F2、F3分别为子目标函数距离纵深f1与雷达法线方向偏离度f2以及武器系统部署均匀度f3进行归一化处理之后的结果,在后续论述中将对上述具体计算方法进行深入讨论;ω1、ω2、ω3分别为纵深、雷达法线方向偏离度与均匀性相对应的权重,ω1,ω2,ω3∈(0,1)且ω1+ω2+ω3=1。
3.1 武器系统部署距离纵深

用下式所示的目标函数描述武器部署区域的纵深性。

(3)
距离区间的长度由范数‖·‖表示。Zθi越大,表示武器系统在θi方向上的纵深越大。
3.2 雷达法线方向偏离度
武器系统应尽可能早的探测到来袭目标,并对其进行稳定跟踪,适时拦截。针对上述问题需求分析,建立雷达法线方向偏离度目标函数。

(4)
3.3 武器系统部署均匀度
为了防止在某方向上由于武器系统部署位置产生的火力盲区,造成敌来袭目标突破我方防御。第i个目标在θi方向上通过杀伤区的航迹总和记为dθi。构造描述武器系统部署均匀度的函数为
(5)
3.4 子目标函数的归一化方法
在得到距离纵深f1与雷达法线方向偏离度f2以及均匀度f3后,由于三者量纲、数量级均不同,无法对其直接进行加权求和计算,因此,需要对其进行归一化处理得到子目标函数F1、F2和F3,其归一化方法如下。
对于效益型指标:
(6)
其中,l指距离纵深、雷达法线方向偏离度以及均匀性,n为方案编号。效益型指标为数值越大,综合评估结果越好。
3.5 优化调整部署的约束条件
据建立的基于多目标组合优化理论的部署方案综合评估模型,在求解时还需要设置相应的约束条件,其对应为求解算法中的适应度函数[5]。部分约束条件在上文已经设置,本小节对剩余关键约束条件进行设定并表示。
1) 权重约束。综合目标函数中子目标函数F1、F2和F3的权重ω1、ω2、ω3满足:ω1,ω2,ω3∈(0,1)且ω1+ω2+ω3=1。

综上所述,所建立的基于多目标组合优化理论的部署方案综合评估模型[6-11]为
(7)
4 改进遗传蜂群算法
4.1 人工蜂群算法
Karaboga[12]受启发于蜜蜂的觅食行为,于2005年提出了一种模拟蜜蜂群体寻找食物源行为的智能优化算法——人工蜂群算法(artificial bee colony algorithm,ABCA)。传统的人工蜂群算法搜索最佳食物源的流程可以总结为4个阶段[13]:
1) 初始阶段。每个食物源均代表待解决问题的一个可行解,雇佣蜂数量等于跟随蜂数量。假设搜索问题为求最小值,初始阶段随机生成SN个食物源,可以表示为
Xi, j=Xmin, j+rand(0,1)(Xmax, j-Xmin, j)
(8)
其中,i=1,2,…,SN,j=1,2,…,D,D是食物源位置变量的数量,即问题的维数,Xmin, j、Xmax, j分别是是食物源第j维的下界和上界。
2) 雇佣蜂阶段。每个雇佣蜂仅对应一个食物源,因此在这个阶段雇佣蜂与食物源的数量相等。每只雇佣蜂在其对应食物源Xi附近搜索,随机选择第j维进行更新,寻找新的食物源Vi:
Vi, j=Xi, j+φi, j(Xi, j-Xk, j)
(9)
其中,φi, j是[-1,1]之间的随机数,k∈{1,2,…,SN}(k≠i)是随机选择的一个食物源,j∈{1,2,…,D}是随机选择的一个维度。此时,若新的食物源f(Vi)的函数值f(Vi)优于f(Xi),就将Xi替换为Vi,否则保持Xi不变。
3) 跟随蜂阶段。当所有的雇佣蜂搜索完毕之后,跟随蜂将收到雇佣蜂共享的食物源信息。跟随蜂收到信息后,按照一定的概率选择食物源进行采蜜,选择第i个食物源的概率为
(10)
其中,fiti是食物源Xi的收益度,SN为食物源、雇佣蜂及跟随蜂数量。
4) 侦察蜂阶段。若某个食物源经过连续多次搜索后仍然没有得到更新,则放弃此食物源,该食物源的雇佣蜂变成侦察蜂,依据式(8)进行初始化搜索,寻找新的食物源。设定搜索阈值limit,即当搜索次数超过limit时,放弃食物源。
人工蜂群算法具有搜索能力强、结构简单、参数较少等优点,但同时也存在着收敛速度较慢、易早熟、局部搜索能力差和蜂群多样性小等缺点。因此,引入传统遗传算法中的遗传变异交叉等思想,并结合改进的自适应策略,提出一种改进的遗传蜂群算法。该算法可以融合遗传算法中的遗传进化策略与蜂群算法寻优策略。充分利用二者的优势并对缺点进行互补,具有快速、准确的全局寻优能力。
4.2 遗传算法与蜂群算法的融合
遗传算法(genetic algorithm,GA)是在1975年由美国的Holland教授首次提出的一种基于达尔文进化论中的自然选择和遗传机制的全局优化搜索智能算法,具有选择、交叉、变异3个基本算子[14]。
在人工蜂群算法中,为了提升算法的开发能力,提高收敛速度,可以引入遗传算法中的交叉和变异操作。
交叉操作可以使食物源集合中的2个食物源路径之间经过交叉产生新的食物源路径,从而获得2个新的食物源,引导蜂群向最优食物源方向搜索进化,最终得到由全部最优的食物源组成的食物源集合。本文使用后续交叉方法,对于2条搜索路径随机产生一个变异点,将该变异点后续的路径进行完全交叉。
变异操作可以增加食物源的多样性,防止蜂群陷入局部最优解中。本文使用中间变异方法,在搜索最优路径时,随机产生2个隔层变异点,将2个变异点之间的路径进行同层随机选取。
在算法中,可以设定交叉概率参数与变异概率参数,表示交叉操作与变异操作发生的可能性,分别用Pc和Pm表示。如果变异操作过多,将影响整个蜂群搜索最优食物源的过程,因此一般情况下变异概率Pm取值较小。
4.3 食物源的自适应选择策略
在利用智能算法解决寻优问题时,一般情况下都希望算法在初期可以更加侧重于探索(Exploration),即更多的在解空间中搜索新解,实现全局搜索,而后期则更加侧重于开发(Exploitation),即能够在解空间中最优解附近进行更加深入的局部搜索,达到加快收敛速度的目的。为了加强算法的开发能力,可以将遗传算法与蜂群算法进行融合,此时在遗传蜂群算法中引入食物源的自适应选择策略,加入自适应因子ω,让算法可以在探索与开发之间达到平衡。自适应因子ω与算法的迭代次数有关,其表达式如下:
(11)
其中,iter为当前迭代次数,iter_max为最大迭代次数。算法在进行交叉操作时,将父代设置为跟随蜂所在食物源与当前食物源集合中的全局最优解或该食物源的局部最优解,进行交叉操作。这样既可局部最优问题在初期就对算法的后续进行产生影响,还可以加快算法后期搜索全局最优解的速率,最终实现提升算法整体性能的目的。
4.4 算法流程
在基本人工蜂群算法的基础上,引入遗传算法中的交叉操作与变异操作[15],并结合改进的食物源自适应选择策略,使得算法实现探索与开发的平衡,能够做到初期全局寻优与后期快速收敛,得到了改进遗传蜂群算法(improved genetic bee colony algorithm,IGBCA)。
利用自适应选择策略的遗传蜂群算法求解最优部署方案时,每一种部署方案都是一个食物源,所有的方案构成了食物源集合,通过交叉变异操作,结合自适应搜寻,可以求得收益度最高的方案路径,该路径即为求解得到的最优方案。
改进后的遗传蜂群推理算法的具体步骤如下:
Step 1:初始化蜜蜂种群,雇佣蜂和跟随蜂数量均为SN,搜索阈值limit,初始迭代次数iter=0,最大迭代次数iter_max,交叉概率Pc,变异概率Pm,此时取变异概率Pm值较小,改进的自适应因子ω=iter/iter_max;
Step 2:依据式(8)随机产生SN个初始食物源Xi,即随机产生SN条初始推理路径,并计算每个食物源的收益度;
Step 3:雇佣蜂依据式(9)在食物源附近搜索新食物源Vi,计算其收益度;
Step 4:比较新旧食物源的收益度,若Vi收益度较高则替换掉Xi,否则保留Xi;
Step 5:依据式(10)计算跟随蜂选择食物源的概率Pi;
Step 6:跟随蜂依据概率Pi选择食物源;
Step 7:跟随蜂搜索新的食物源Vi:如果Pm<φ1
Step 8:与Step 4相同;
Step 9:判断某食物源的搜索次数是否超过了搜索阈值limit,若有,则依据式(9)产生新的食物源替换掉它;
Step 10:判断是否满足循环终止条件,即iter>iter_max,如果满足条件则输出当前的最优解,即最终推理路径,否则返回Step 3,且iter+1。
5 仿真实验结果与分析
本文采用的改进遗传蜂群算法的目标函数由武器系统部署距离纵深、雷达法线方向偏离度和武器系统部署均匀度共同组成。在实际情况中,通过查阅资料[16-17],本文对ω1、ω2分配0.5、0.1的权重,与此同时ω3=0.4。
实验平台操作系统为Windows 10,CPU型号为Intel Core i7-8750H,GPU型号为NVIDIA GTX1070。算法数据来源于某想定给定数据,其中包括基于北天东坐标的前期预选部署阵地坐标500个,来袭目标轨迹数据6组,保卫要地坐标5个。
将本文算法与蜂群算法及遗传蜂群算法在同等时间和环境限制下的优化效果列表,如表1。

表1 算法迭代效率对比Table 1 Algorithmic iteration efficiency comparison
对算法进行性能对比,对3种算法设置相同的初始函数值和迭代次数,在迭代次数相同时,本文算法的收敛速度更快,收敛性更好。
最后在Windows操作系统环境下,基于某部署系统,进行了本文算法的实现,并对算法的效果进行了可视化,系统基本操作界面如图1所示。

图1 部署系统基本操作界面Fig.1 Simulation environment interface
使用本文给出的算法对某想定进行部署后,以探测面积和火力面积覆盖为参数,分别以一层覆盖、两层覆盖、要地覆盖层数列表如表2所示。由表2可得出结论:本文算法完全达到目标要求的覆盖条件。

表2 算法部署资源参数对比Table 2 Algorithm deployment comparison
系统得到的部署如图2所示。其中,区域为作战区域,白色扇形区域为武器系统雷达扫描扇区,阴影区域外线为我方保卫要地生死线,淡蓝色路径为敌方攻击路径。

图2 武器系统部署示意图Fig.2 Schematic diagram of weapon system deployment
为了更加直观地实现武器系统部署方案的拦截效果,系统对武器系统目标探测能力和武器系统拦截能力都进行了三维可视化处理,其中目标探测跟踪能力为绿色区域如图3所示,拦截能力为红色区域如图4所示。
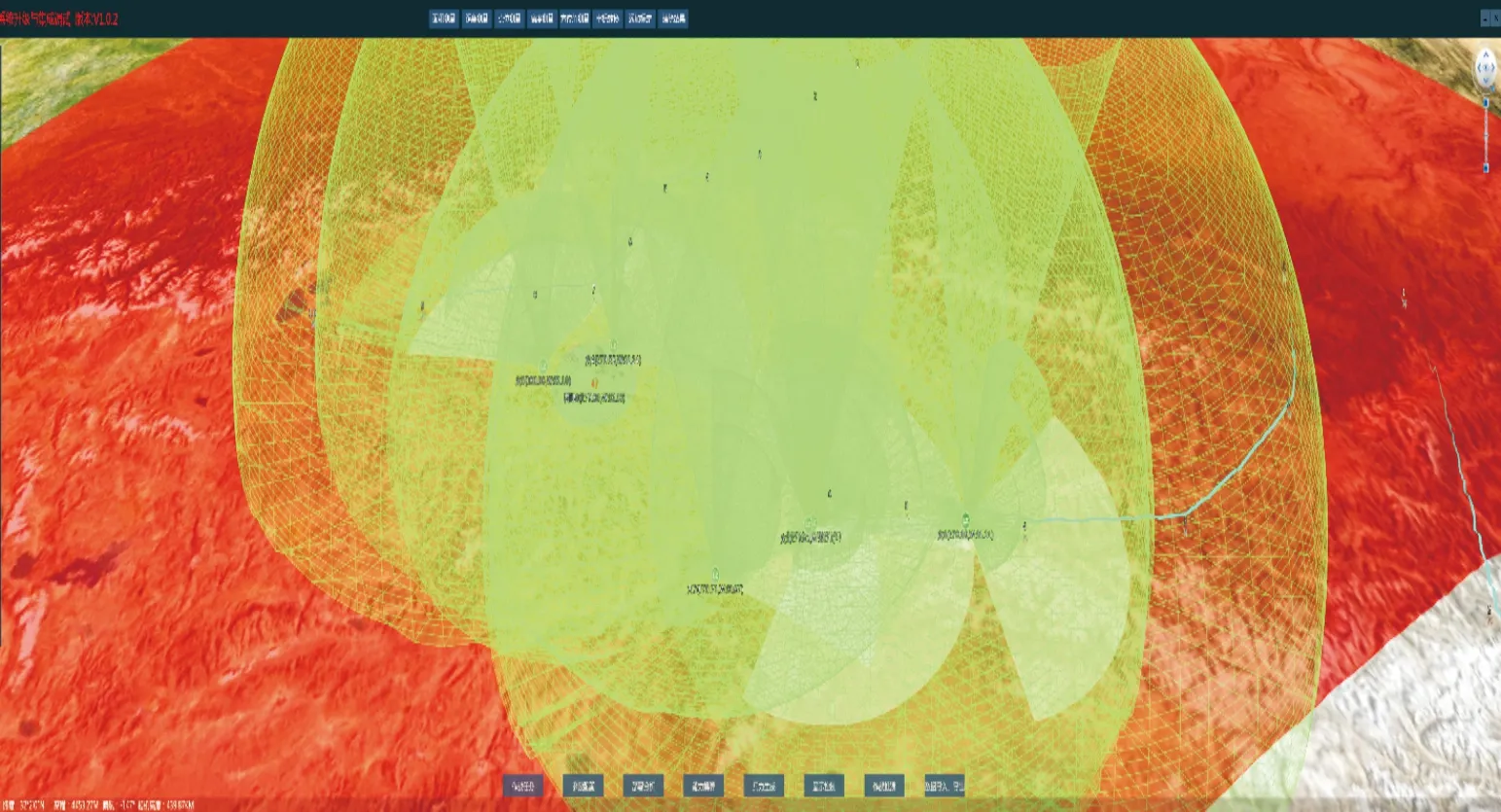
图3 武器系统目标探测跟踪能力三维示意图Fig.3 3D schematic diagram of weapon system target tracking capability

图4 武器系统拦截能力三维示意图Fig.4 3D schematic diagram of weapon system interception capability
6 结论
本文研究了在分布环境下的武器系统优化部署问题,通过融合遗传算法与蜂群算法的优势,增加自适应因子,克服了传统算法效率较低与容易陷入局部最优的缺点。基于上述改进提出了一种改进遗传蜂群算法,设计了相关数学模型,通过分析迭代次数和目标函数值的关系以及算法最终形成的探测面积火力覆盖面积比例,验证了本文改进遗传蜂群算法在武器系统优化部署时具有更加优秀的收敛性和效率,可以更加迅速达到目标要求函数值。
此外,将算法应用于指控仿真软件时,直观展示了基于该算法进行武器系统部署的性能,也暴露出了算法未充分考虑地形因素对武器系统探测、拦截性能影响的缺点,今后将针对该问题进一步研究。
