海底主动光学探测影像亮度校正与色彩恢复
2022-09-07刘镕滔柳稼航
刘镕滔,柳稼航
(南京航空航天大学 航天学院, 江苏 南京 210016)
1 引 言
海洋蕴含丰富的矿产资源,开发和利用海洋资源是解决人类资源短缺的重要途径。对于大洋海底探测,自然光线难以到达探测深度,光学成像主要依靠主动点光源进行照明。由于在水体中,光的衰减与光程呈指数关系增长,且不同波长衰减程度不同,因而在点光源视场的任意截面上照度不同。水体对光的散射特性同样会造成光学图像模糊、对比度低等问题[1],不但影响对海底真实环境的认知,还影响图像信息的解译。因此,水下光学图像质量改善与恢复具有重要应用价值。
近年来,随着海洋探测和开发不断深入,对水下光学图像质量改善和复原的研究逐渐成为热点,并取得一系列研究成果。根据方法机理的不同,水下光学图像恢复可以分为非物理模型方法和物理模型方法。非物理模型方法针对水下图像的特点,利用经典空域法和频域法来进行水下图像增强[2]。Henke 等基于灰度世界假设条件,分离水下图像的前景和背景,采用白平衡算法对水下图像的前景进行处理[3]。Fu 等基于Retinex 方法通过不同策略增强分离的光照分量,进而改善水下图像的清晰度[4]。杨卫中等采用对比度受限自适应直方图均衡化(Contrast Limited Adaptive Histogram Equalization, CLAHE)方法解决图像对比度差的问题[5]。Xiang 等[6]提出了一种红通道加权补偿与伽马校正(Red channel Weighted Compensation and Gamma Correction model,RWCGC)算法,利用通道间的关系补偿红通道后再对图像进行直方图归一化,纠正图像偏色问题并提高对比度。
物理模型方法主要依据光在水体中的传播和衰减机理建模,通过成像模型来恢复观测图像的原本面貌。鉴于暗通道先验法[7]在大气去雾方面的显著效果,被学者广泛应用于水下图像去散射。Chiang 等结合水下光选择性衰减的特点,根据暗通道先验去雾算法提出了水下图像复原方法[8]。Adrian Galdran 等针对水下红通道衰减快的特点,以暗通道先验为基础,提出红通道先验(Red Channel Prior, RCP)方法,取得良好的效果[9]。Xie 等认为背景光估计是否精确直接影响去散射的效果,为避免图像中白色像素或亮像素的干扰,利用物体前景与背景水体的非相关性将二者分开,对背景水体进行背景光估计[10]。王一斌等提出自适应估计图像背景光与非局部先验相结合的方法有效进行单幅水下图像复原[11]。
非物理模型和物理模型法虽然针对一些应用场景取得了较好的效果,但依然存在一些亟待解决的问题。非物理模型法未考虑水下成像机理,图像处理后易出现鬼影、不自然或过度补偿的问题。物理模型法对背景光估计要求高,而背景光估计方法多针对特殊的应用场景,实用性较差,同时仍需要非物理模型方法进行颜色校正。随着深度学习的广泛应用,学者们尝试将深度网络模型用于水下图像处理。林森等利用多输入融合的对抗网络和生成网络的编解码结构进行水下图像增强[12]。Li 等利用水下场景先验信息合成的水下图像数据训练卷积神经网络(Underwater Convolutional Neural Network, UWCNN)用于增强水下图像[13]。深度学习方法对水下图像样本数据量和质量要求高,在处理特定问题时无法获得可靠的同场景自然环境光下的图像。同时,鲜有针对水下图像照度不均匀问题提出解决办法。
本文针对水下光学成像的特点,基于海水的光辐射传输衰减特性,采用相对辐射校正原理来剥离并补偿光程差引起的衰减,然后对校正后的图像进行增强处理,以提升图像质量。同时,采用大洋探测现场采集的真实图像进行实验,并与近年来提出的几种主要方法进行了对比和分析,经主、客观评价,验证了本文算法的有效性和可行性。
2 水下主动光源光学成像机理及像质退化模型
2.1 理想点光源照明特性
由于海水的强衰减作用,以太阳作为光源的自然光线在海水中的传输距离很短[14]。因此,大洋海底光学成像探测采用主动光源进行照明。由于点光源具有成本优势,应用上多采用其作为照明光源进行水下主动光学成像探测[15]。
图1 是水下理想点光源垂直照射时垂直中心光线截面上的光照强度分布示意图。由于水体对光强的衰减作用,即便是理想点光源也因各光线的光程不同,导致到达探测截面的光强不同。光照中心光程最短,所以海水对中心光线衰减的程度最小。在距离光照中心半径为r的点上,由于入射光光程比中心光线的光程更长,因而衰减程度更大,亮度更暗(图1(a))。当海底为平整、均一的表面时,这一过程的结果可由图1(b)表示。亮度在光照中心最大,并沿中心向外呈辐射状连续、快速降低。由于入射照度的不同,必然导致观测表面图像的亮度不同。而这种不同并不是由于观测目标自身反射率的不同导致的,而是由于海水对不同光程的光衰减程度不同造成的。同时,由于海水的选择性吸收作用,最终导致观测图像的亮度和色彩产生畸变。
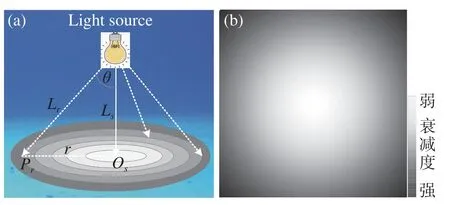
图1 点光源垂直照射下的照度相对分布示意图。(a)理想点光源垂直照射示意图;(b)光照强度衰减示意图Fig. 1 Relative distribution of illuminance under vertical illumination of the point light source . (a) Schematic of vertical illumination of the ideal point light source and (b) schematic of light intensity attenuation
理想的点光源,满足各向同性特点,可以利用图1 所示的物理机理计算出各处的衰减量,进而进行亮度补偿,但实际应用中的光源并不满足这一条件。同时,相机等硬件系统和安装参数未知,限制了物理模型的实际应用。
2.2 主动照明光学成像模型
由于海底勘探的特殊性,主动光源中心指向与相机光轴指向一致,且大致垂直指向海底,其工作模式如图2 所示。
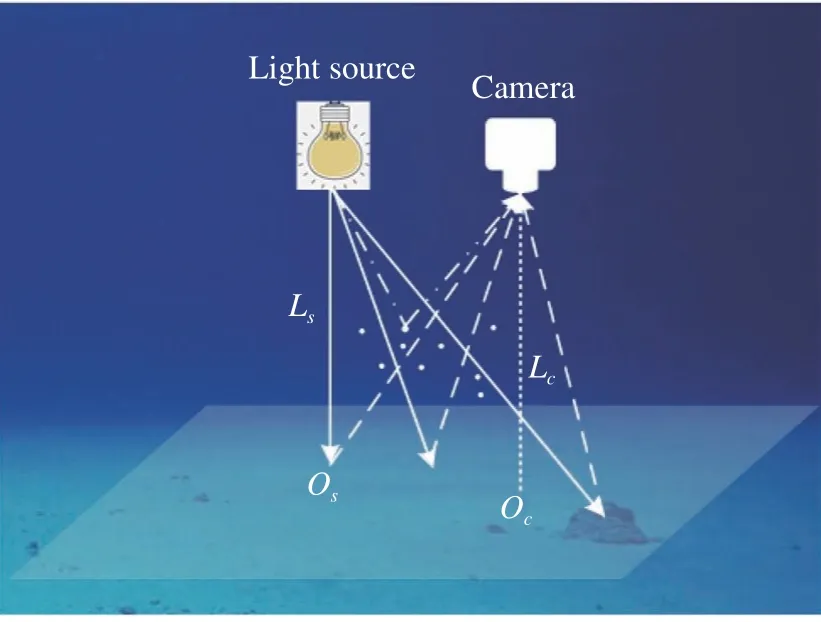
图2 海底主动光学成像示意图Fig. 2 Schematic diagram of seabed active optical imaging
图2 中,Ls为光源中心光线,其与海底的交点为Os( 这里称为光照中心),Lc是相机的光轴指向,Oc为Lc与海底的交点(这里称为成像中心)。假定光源发出的光为各向同性,且海水均匀,则光源发出的各个方向的光到达海底的衰减程度仅与光程有关。这一过程反映为海底被照亮区域,其亮度从光照中心Os向周围呈辐射状减弱,并快速衰减到难以被探测到的程度。当Ls垂直海底照射时,光照衰减呈圆形逐次增大;当Ls非垂直照射时,光照衰减呈椭圆或其它形式逐次增大。点光源发出的光经海水衰减后到达海底,被海底反射后上行至相机被接收。同时,由于海水的散射作用,部分后向散射光也被相机接收。
事实上,对于匀质的海底表面,在近垂直观测时可以近似为朗伯面。相机接收到的能量主要来源于两部分,一部分是海底反射的上行辐射Eref;另一部分是海水前向散射(即环境光)Eenv,成像模型可由式(1)简化表示。

不同像素亮度主要取决于对应海底地元入射光的强度和该地元的反射率,当入射光强相同时,图像的亮度就直接反映地物自身的反射特性。但由于点光源的照明特性和海水的强衰减作用,使得观测场景内不同位置上的入射光强度不同,进而导致对应位置上的图像亮度失真。当海底表面与成像系统(光源和相机)的观测距离不变时,图像上每个位置的总光程差将保持不变,海水对图像亮度造成的衰减量也基本保持不变。
2.3 水下光学图像辐射衰减机理
海底反射亮度是决定相机入瞳能量的主要因素。但由于海水衰减作用,即使海底物质比较均一(即反射率相同),同样会导致相机采集到的图像在不同图像位置上亮度不同。这种并非海底目标自身辐射特性造成的辐射畸变是影响图像质量的重要因素,须首先剥离。
图3 所示是大洋海底探测的实际光学影像。尽管海底比较均匀,基本是由砂砾组成。但由于相机光轴与光源指向不同,海浪等多种因素耦合作用下,不但最大亮度不在图像中心,而且衰减程度也不以最大亮度为中心呈规则的圆形分布。造成这种现象的主要原因是由于光照中心Os与成像中心Oc不重合,光照中心Os偏向图像右上角,导致图像上最亮的地方并不在图像的中心,右上部分图像亮度比其它地方更亮。

图3 点光源照明下的均匀海底光学图像Fig. 3 Underwater optical image of a uniform seafloor illuminated by the point light source
上述现象表明,由于相机视场内海底表面各处接收到的照度本身不同,即使是均匀表面也会导致其图像亮度不同,造成辐射畸变。这是造成水下光学图像亮度畸变的主要原因。同时,由于海水对光的衰减与波长有关,短波散射相对较强而吸收相对较弱,长波散射相对较弱但吸收较强,导致水下光学图像的色彩一般呈蓝绿色调,这是造成水下光学图像颜色畸变的主要因素。由于亮度畸变与色彩畸变机理不同,本文从亮度补偿和色彩恢复两个方面对水下退化图像进行增强。此外,由于实际应用中光源并不完全满足理想光源的条件,且相机及系统参数、海水衰减系数等未知,难以利用物理模型恢复亮度。故本文将从图像自身特点入手,进行图像亮度和色彩恢复。
3 基于相对辐射校正的亮度补偿
3.1 海底探测光学成像特点
海底探测光学成像为典型的点光源主动照明成像。当光源为理想点光源,且光源中心指向与相机光轴重合且严格标定、成像系统与海底准确距离和海水光学参数已知时,可以通过物理模型进行亮度校正和色彩恢复。
事实上,海底形貌和环境探测对成像探测系统并不进行严格的标定和高精度的装配,光源、相机及海水等相关参数未知,再加上海浪等环境作用,实际成像状态与理想物理状态之间存在较大差距,物理模型无法使用。这就需要对光源及成像系统无特殊要求,且能适应动态应用环境的处理方法来解决实际应用问题。基于此,本文提出基于相对辐射校正的思想对海底探测图像的亮度进行补偿。
3.2 亮度补偿原理及参数计算
电荷耦合器件(CCD)是成像系统的重要元件,主要用于光/电转换。由于制造等原因,CCD 器件的每个单元对相同输入的响应不一致,致使被探测对象的图像亮度失真。为了消除这种因响应不一致造成的辐射畸变,遥感成像探测中主要采用相对辐射校正来进行处理。其基本思想是利用成像设备对相同光照条件下的均匀辐射场成像,由于每个像素上的辐照度相同、反射率相同,那么造成图像上各像素值不同的原因可以等效为成像系统在每个CCD 单元上的响应不同。当给每个像素乘以特定系数或者加以特定偏置,就可以使每个像素在输入相同时产生相同的输出,实现各像素响应一致,达到相对辐射校正的目的[16]。这种方式不但可以消除系统响应不一致的问题,还可以消除大气辐射传输造成的误差,是遥感观测最为重要的定标方式之一。
海底光学探测图像各通道的亮度由海底自身反射率、入射照度和总光程决定。假定成像相机的CCD 响应是一致的,当海底物质均一时每一地元反射率相同,此时像元的输出亮度就决定于入射照度和总光程。如图1 所示,点光源照明其辐射呈放射状,海底被照亮区域的相对亮度与其到光照中心Os的距离有关。由于每一地元到光照中心的距离不同,进而导致图像上不同像素的亮度不同。对水下图像辐射校正的目的是剥离海水对光线衰减造成的非均匀性辐射畸变,这一过程可以等效为相同的入射辐射而成像系统的器件单元响应不同,因而可以采用相对辐射校正原理来消除图像上不同位置上的亮度畸变。那么,只要估计出每个像元衰减系数或者衰减量,再利用这些系数或者衰减量就可以实现各像素的相对亮度补偿。
(1) 参考图像选择
相对辐射校正需要表面反射较为均一且地形平坦的区域作为辐射校正场。在大洋探测中可以选择同一海域中海底相对均匀、平整区域的图像作为参考。对于相同光源、相同光学系统和相同的海水特性,光辐射衰减主要与对应像元到海底的距离有关。当这一距离相对变化较小时,其衰减可以近似相同,从而采用相同的参数实现不同图像的亮度校正。在大洋海底探测任务中,如图3 所示的图像大量存在,可以作为亮度相对校正的参考图像。
(2) 基准参考亮度估计
理想的辐射参考源表面光滑、均一,为良好的朗伯体。但在实际应用常常不能满足这一条件,因而需要对参考图像进行预处理,构造出连续、光滑、趋势一致性的参考基准。
由于海水对不同波长的光衰减作用不同,因此将基准参考图像(图3)拆分成3 幅独立的灰度影像,分别代表红、绿、蓝3 个通道(图4 第一排),并进行独立的亮度校正。
图4 第二排为3 个通道灰度值分布的三维俯视图,灰度值近似呈椭圆状从中心向四周衰减。考虑到实用性、方便性和直观性,本文采用多项式对各通道图像的亮度进行曲面拟合。为了获得合适的多项式次数,进行了系列实验,分别使用二次、三次、四次和五次多项式对基准参考图像(如图3 所示)各通道的亮度进行拟合。采用二次多项式时,三通道的R2值分别为0.908 5、0.944 1 和0.940 2,三次多项式中的R2值分别0.931 6、0.953 2和0.950 8,四次多项式中的R2值分别0.939 3、0.966 3和0.970 8,五次多项式中的R2分别0.940 8、0.969 9和0.973 7。
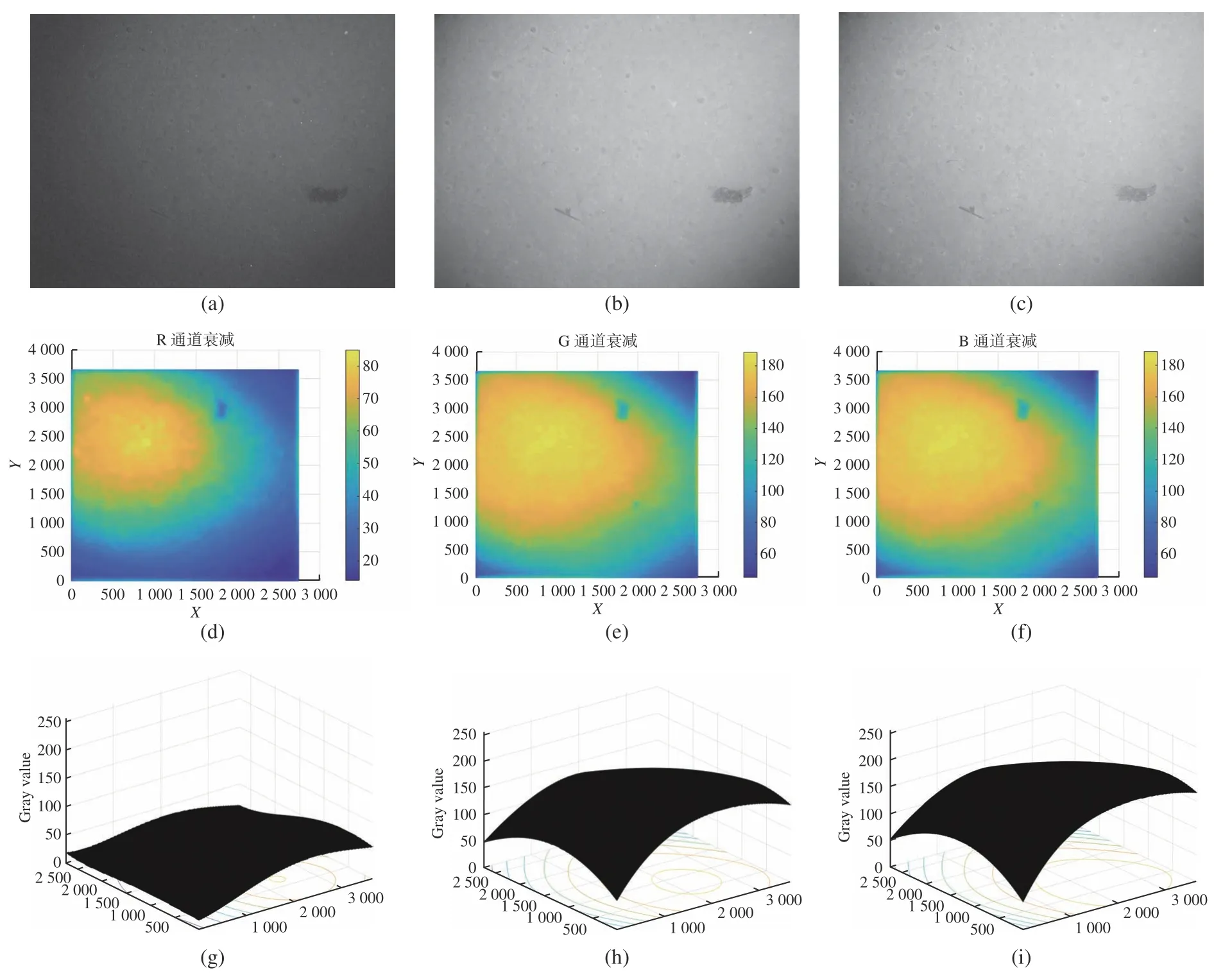
图4 参考图像的各通道图像及其亮度拟合曲面。(a)~(c)参考图像的红、绿、蓝通道;(d)~(f)红、绿、蓝通道的三维俯视图;(g)~(i)红、绿、蓝通道的拟合曲面Fig. 4 Each channel of the reference image and their brightness fitting surface (a)-(c) red, green, blue channels of the reference image; (d)-(f) 3D top view of the red, green and blue channels; (g)-(i) fitting surface of the red, green, blue channels
由此可知,采用五次多项式时拟合效果最好。但由于高次多项式计算复杂度高,四次多项式与五次多项式的拟合结果R2很相近,且在多次不同的实验中四次多项式均可以获得很好的拟合效果,故采用四次多项式进行曲面拟合。
多项式曲面方程可以统一用式(2)表示,

其中n代表多项式的次数,aij为多项式的系数项,(x,y)代表图像中的像元位置p(x,y)。当n=4 时,aij有15 个系数待解,因而至少需要15 个分布均匀的样本点。这里,为了获得稳健的结果,首先对原始图像进行中值滤波,然后采用最小二乘解求系数,结果如表1 所示。
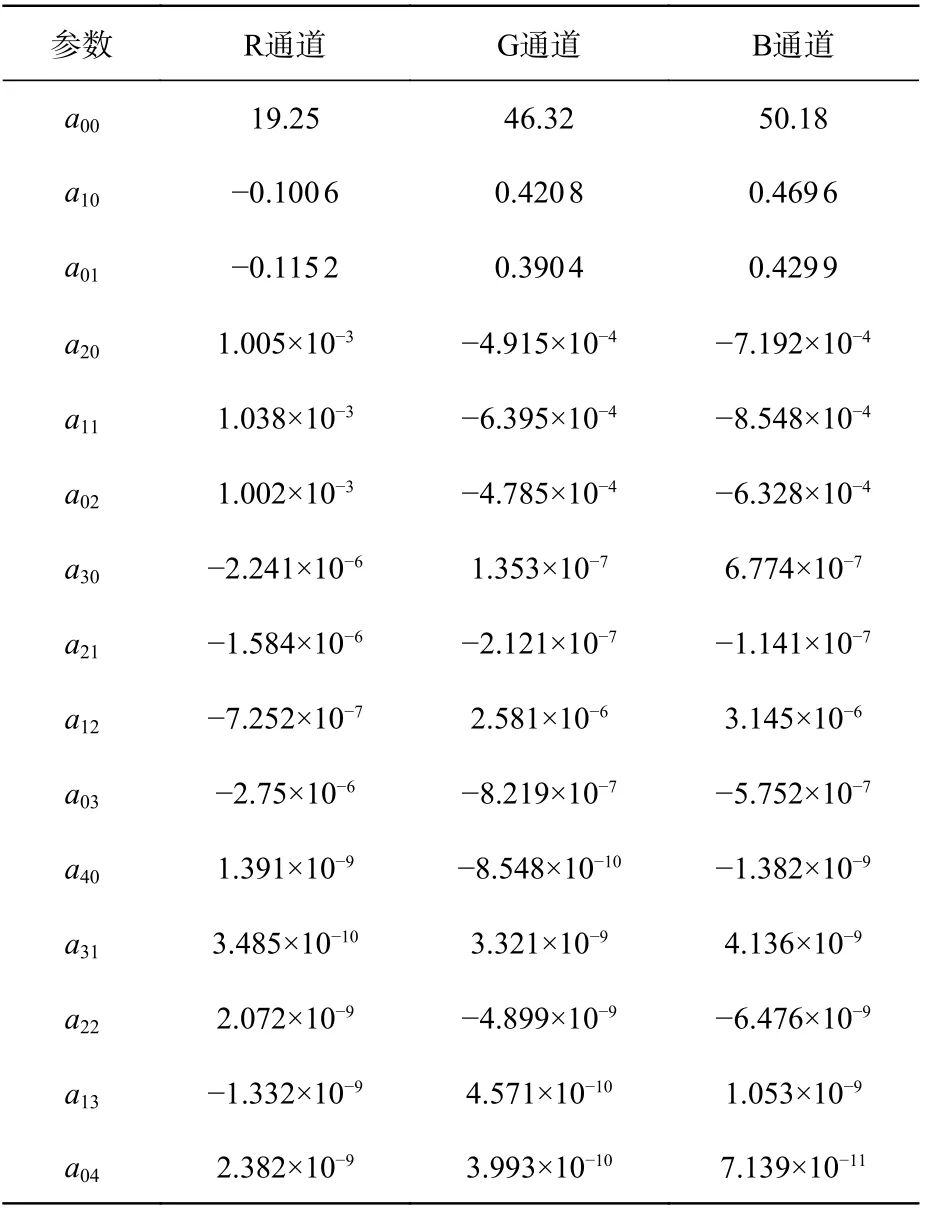
表1 参考图像各通道灰度曲面四次多项式拟合参数Tab.1 Quartic polynomial fitting parameters of the gray surface of each channel of the reference image
由前述分析可知,当成像系统与海底的距离基本保持不变时,海水对光源相同光线的衰减保持不变。当光源稳定且成像系统距离海底的距离基本保持不变时,不管下垫面如何,海水对光的综合衰减作用可以认为是相同的。因此,对于同批次(成像系统与海底的相对高度基本一致)的海底探测影像,可以直接使用由参考基准估算出的衰减量进行计算而不必重新估计。但当高度变化较大,光源特性改变,或者光源与成像系统相对安装位置发生变化时,需要重新利用上述原理进行参考基准估计,利用新的估计参数对待处理图像进行校正。
(3)亮度衰减量计算
用η 表示参考图像的亮度拟合曲面,它描述了水下光学图像不同位置上各种因素造成的衰减量的相对分布。由于参考基准图像的下垫面是同一种物质形成的均一表面,当入射光强相同时,其图像应具有相同的亮度。为了获得海水对下行和上行光的总衰减量,以拟合曲面(图4(g)~4(i))的顶点(即最大亮度所在点)为参考点,并设定该点的衰减量为零。设拟合曲面最大亮度值为IMax,假定过曲面顶点的平面γ与相机光轴垂直,那么图像上每个像素(x,y)的亮度补偿量δ(x,y)定义为该像素在曲面η与在平面γ对应像素值之间的差,即:

获得每个像素的亮度补偿量之后,可以将补偿量按像素位置补充到原始图像上,获得亮度补偿结果。图5 第一排所示是按上述方法分别针对图3 三个通道计算获得的亮度补偿值。图中亮度越大,意味着补偿值就越大。图5 第二排是经过亮度补偿后的图像。对比原图可以看出,校正后的图像整体亮度均一,很好地消除了原图中远离光照中心的辐射畸变。
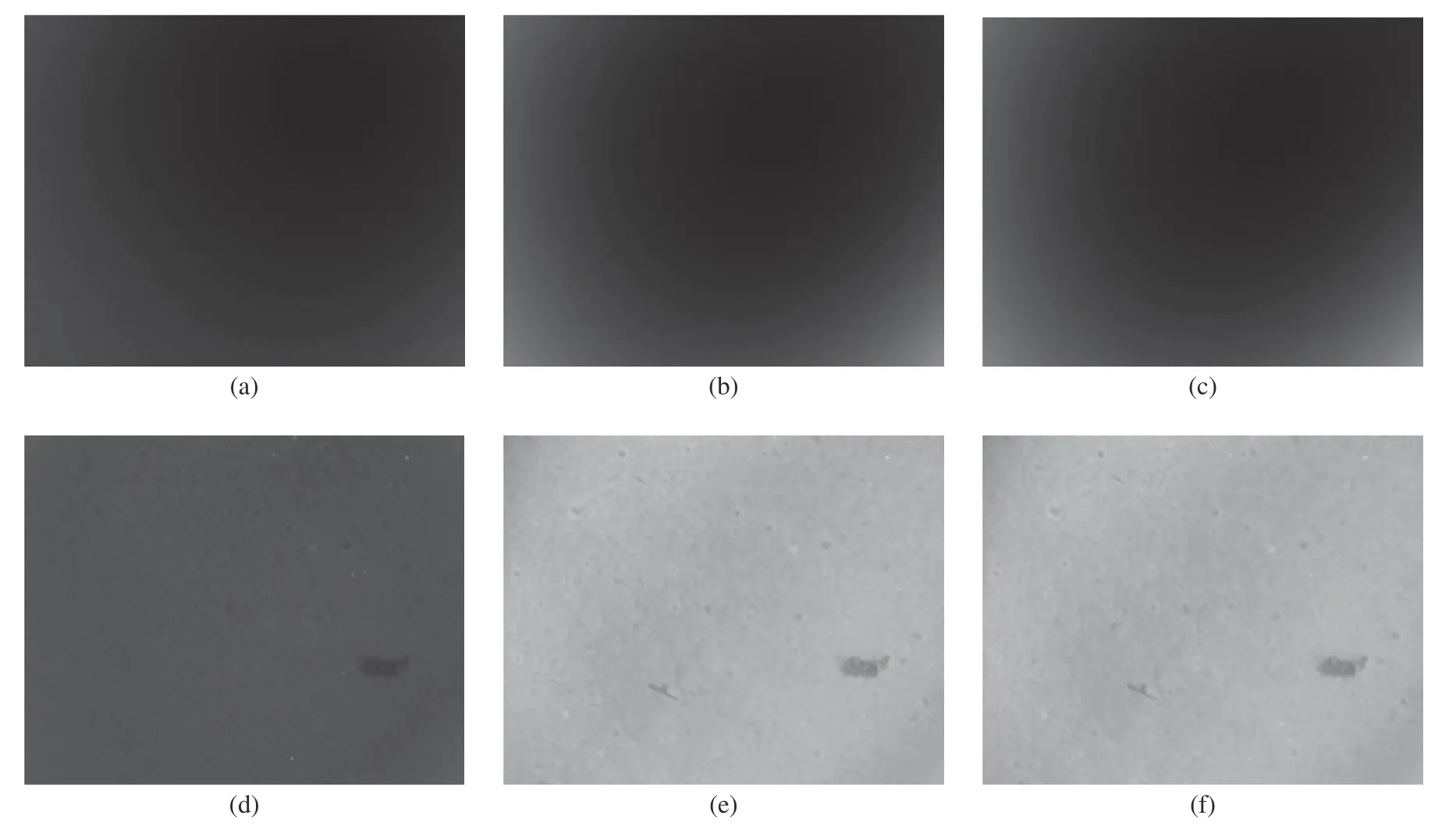
图5 参考图像分通道亮度补偿结果。(a)~(c)分别为红、绿、蓝三通道的亮度补偿量;(d)~ (f)补偿后的红、绿、蓝单通道影像Fig. 5 Individual brightness compensation for each channel of the reference image (a)-(c) Degree of compensation of the red,green and blue channels; (d)-(f) compensated red, green and blue single channel images
在获得参考图像的亮度补偿后,直接应用到同批次的其它图像上。图6 所示是与参考图像(图3)同批次图像,第一排从左到右所示分别是原始图像的红、绿、蓝三通道灰度图像,第二排所示为利用上述参考图像亮度补偿量直接进行亮度补偿的结果。对比原图可知,补偿后的图像亮度整体均匀,消除了因总光程不同造成的亮度衰减。特别是距离中心较远的四角区域的亮度,也得到了很好的补偿,图像细节得以凸显。
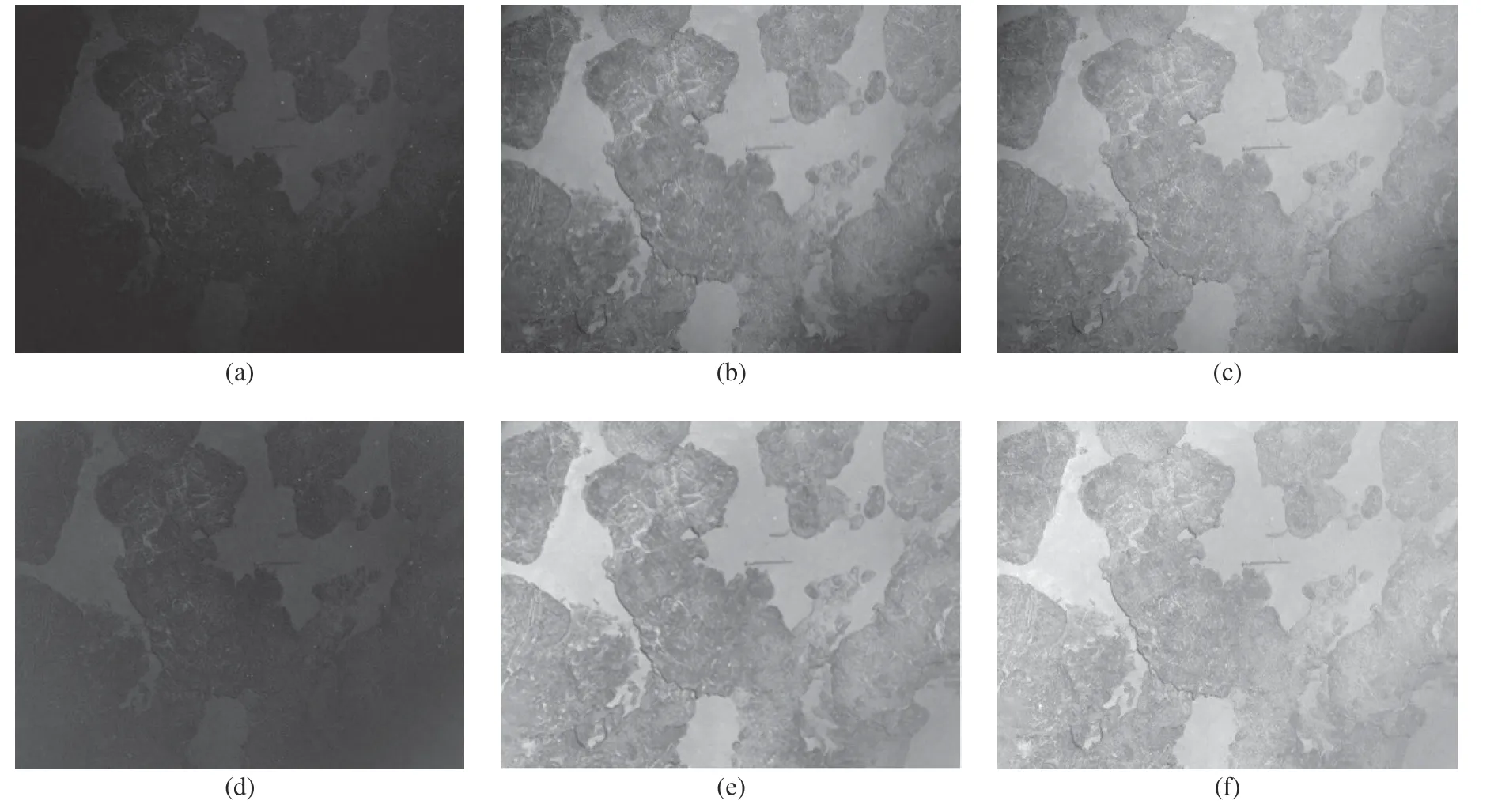
图6 采用参考图像校正参数对同批次的图像补偿。(a)~(c)红绿蓝三通道原始灰度图像;(d)~(f)补偿后的红绿蓝影像Fig. 6 The compensation process of the image in the same batch with reference image correction parameters. (a)-(c) Original gray images of the red, green and blue channels, (d)-(f) compensated images of the three channels
4 基于Retinex 理论的色彩恢复
4.1 色彩预补偿
由于可见光传播衰减的特殊性,水下图像红通道的像素均值偏小,在利用传统图像增强方法进行色彩全局性恢复时,红通道普遍会被过度增大,导致增强后的水下图像出现严重的红色伪影。为解决水下图像中严重衰减的通道在Retinex 方法中过度增强的问题,本文提出基于灰度世界的通道间自适应的补偿方法,对水下图像中衰减严重的通道进行预处理,以避免在亮度校正补偿后的水下图像色彩恢复过程中出现通道过度补偿问题。
在水下图像中,蓝、绿通道比红通道保留了更多信息。由于人眼对于绿光较为敏感,研究表明在实验过程中以绿光为基准处理后的图像色彩更符合人类色彩感受[17]。本文选取亮度补偿后图像的绿通道为参考,基于灰度世界理论利用图像本身信息建立了通道间的自适应补偿关系:(1)待补偿图像绿通道与其它通道均值之差和其它通道本身各像素值大小为权重作为加性补偿;(2)以图3 作为参考图像,计算亮度补偿后的参考图像三通道的均值间的比例关系作为乘性补偿。如公式(4)所示:
4.2 MSR 色彩恢复
Retinex 颜色恒常理论认为人眼感知物体的亮度取决于环境的照明和物体表面对照射光的反射[18],对处理由于散射导致模糊和色彩失真的图像有较好的效果。其数学表达如式(5)所示:

式中I(x,y),L(x,y) 为环境光的照射分量,R(x,y)表示携带图像细节的目标体的反射分量。将图像转换到对数域并进行变换,得到公式(6):

该理论的核心思想是从被观察图像I(x,y)中去除或减弱估计量L(x,y)以消除照射分量,获得物体的反射分量,还原物体原本的颜色并提升清晰度。多尺度Retinex 增强方法(Multi-Scale Retinex, MSR)[19]利用高斯滤波近似估计环境光的照射分量。对图像进行高斯滤波时,滤波尺度σ小的高斯核函数侧重于图像的边缘细节增强;σ较大的高斯核函数则更侧重于增强对比度和确定颜色保真性。多尺度增强将这两种尺度的优点相结合,较单一尺度的增强图像有更好的处理效果,计算模型如式(7)所示:

式中, λN=1/N为高斯核的个数,LMSR(x,y)表示多尺度增强后的照射分量,LS R,n表示利用第n个高斯函数的标准差增强的照射分量。由于Retinex 方法在对数域估计并减去照射分量时可能会出现负值,再转换回实数域得到的图像整体亮度和对比度会下降。因此,本文引入式(8),在不影响Retinex 理论色彩恢复结果的前提下提高图像的对比度,以提高人眼视觉效果。其中avg=127,percent 为对比度调整因子,经实验取0.5 时可以得到较为理想的图像,最后对图像直方图进行归一化,使图像像素分布于[0, 255]内,以提高图像的清晰度。

利用公式(7) 经验性地取N等于3,σ按大、中、小3 个尺度分别选取300,100,40,对比分析引入了几种处理方法的图像增强效果,如图7(彩图见期刊电子版)所示。从对比结果可以看出,预处理方法对MSR 本文引入的通道预补偿方法符合灰度世界假设,能有效抑制水下图像增强中对红通道过度补偿带来的红色伪影问题,获得更接近原始场景的图像,较好地恢复了图像的自然色彩。
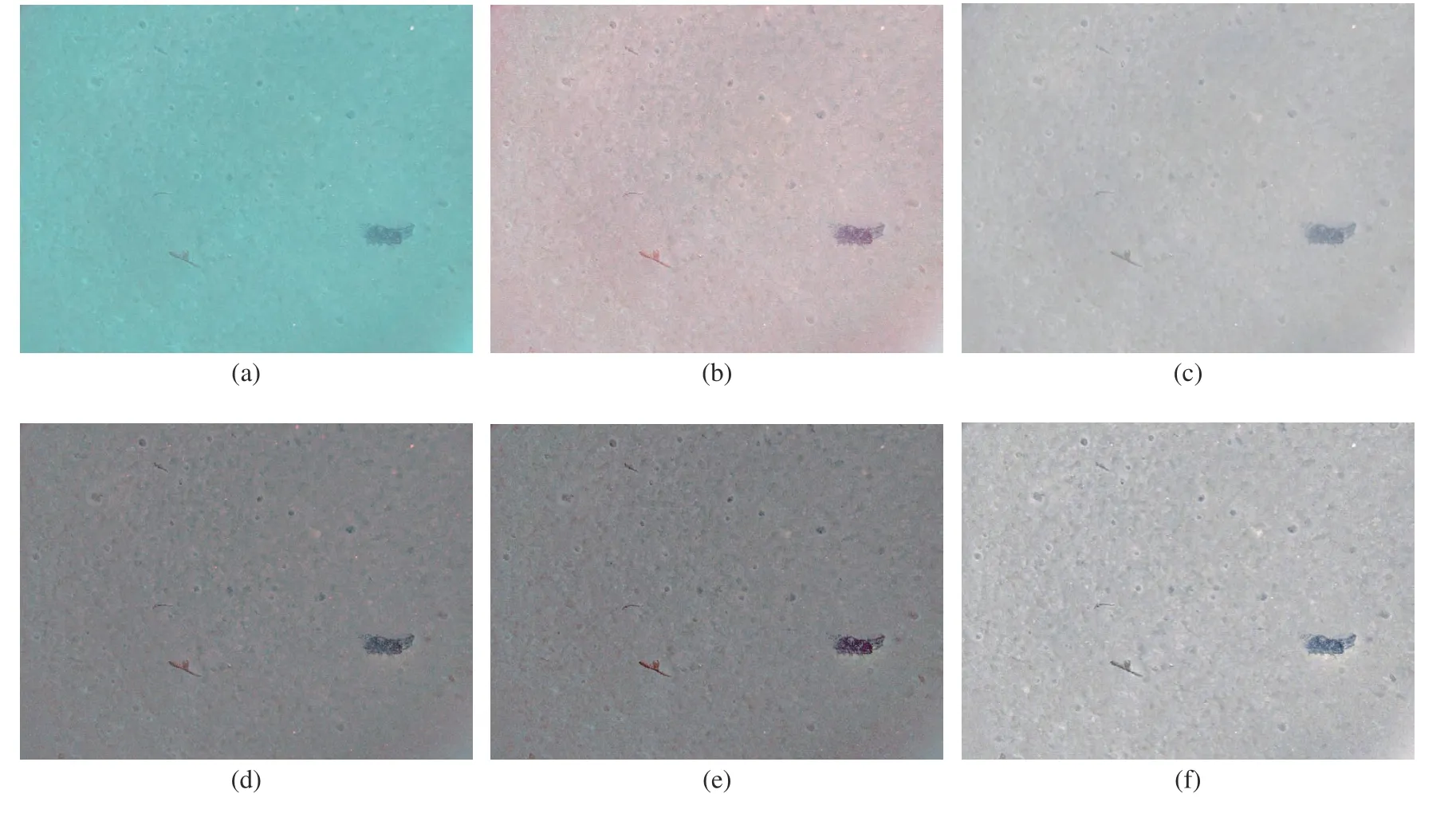
图7 不同图像增强方法效果对比。(a)预补偿输入图像;(b)~(f)分别是灰色世界、本文预处理方法、MSR、灰色世界算法+MSR、本文预处理方法+MSR 方法结果Fig. 7 Comparison of image enhancement with different pre-processing methods. (a) Pre-compensation image; (b)-(f) compensated results with Gray world, the proposed pre-processing method, MSR, Gray world + MSR, and the proposed pre-processing method + MSR methods
5 分析和讨论
为了验证本文方法的有效性,根据上述原理开发了实验程序,使用大洋海底探测的实际图像对本文提出的算法进行测试。实验图像是由海洋科考船采用拖曳方式拍摄的水下图像,软件开发平台为MATLAB R2016a。同时,为了能进一步展示本文方法的效果,还与MSR[19]、CLAHE[5]、RCP[9]、RWCGC[6]和UWCNN[13]等图像增强方法进行实验对比,分别采用主观和客观相结合的方式对结果评价。
5.1 主观评价
主观评价方法是目前图像质量评价的主要且可靠的方法。为了对比不同方法对水下图像的色彩恢复性能,图8(彩图见期刊电子版)给出了不同方法对亮度校正后参考图像增强的最终结果。图8 上排图像分别是采用MSR、CLAHE、RCP 3 种方法的增强结果,下排分别是RWCGC、UWCNN 和本文方法的处理结果。
参考图像对应的海底是砂砾表面,其近似为灰体且平整,故其恢复后的彩色图像不应呈现出明显的彩色特性。图8 第一排左一MSR 方法的校正结果中,图像明显出现由于过度增强导致的伪影,部分区域处理仍偏绿色调,图像整体色调不一致,与图像原本色调相差较大。CLAHE 方法的处理结果没能很好地校正偏色问题,也没能校正亮度失真的问题。RCP、RWCGC 和UWCNN 色彩恢复方面比CLAHE 效果更好一些,但RCP 和UWCNN 使图像亮度大幅降低,同时这些处理方法对图像的亮度校正效果都没有改善。第二排右一是利用本文方法对参考图像的增强结果,结果显示本文方法不但很好地校正了图像的亮度,使得图像不同位置亮度整体均匀、一致,而且也取得了很好的色彩平衡效果,海底的灰体特性经过亮度校正和色彩平衡之后得到较好的复原。原本灰色的砂砾呈现出灰体特性,接近于灰色调,海底的少量岩石和废弃物呈现出彩色调,且色泽均匀,整体效果更优。
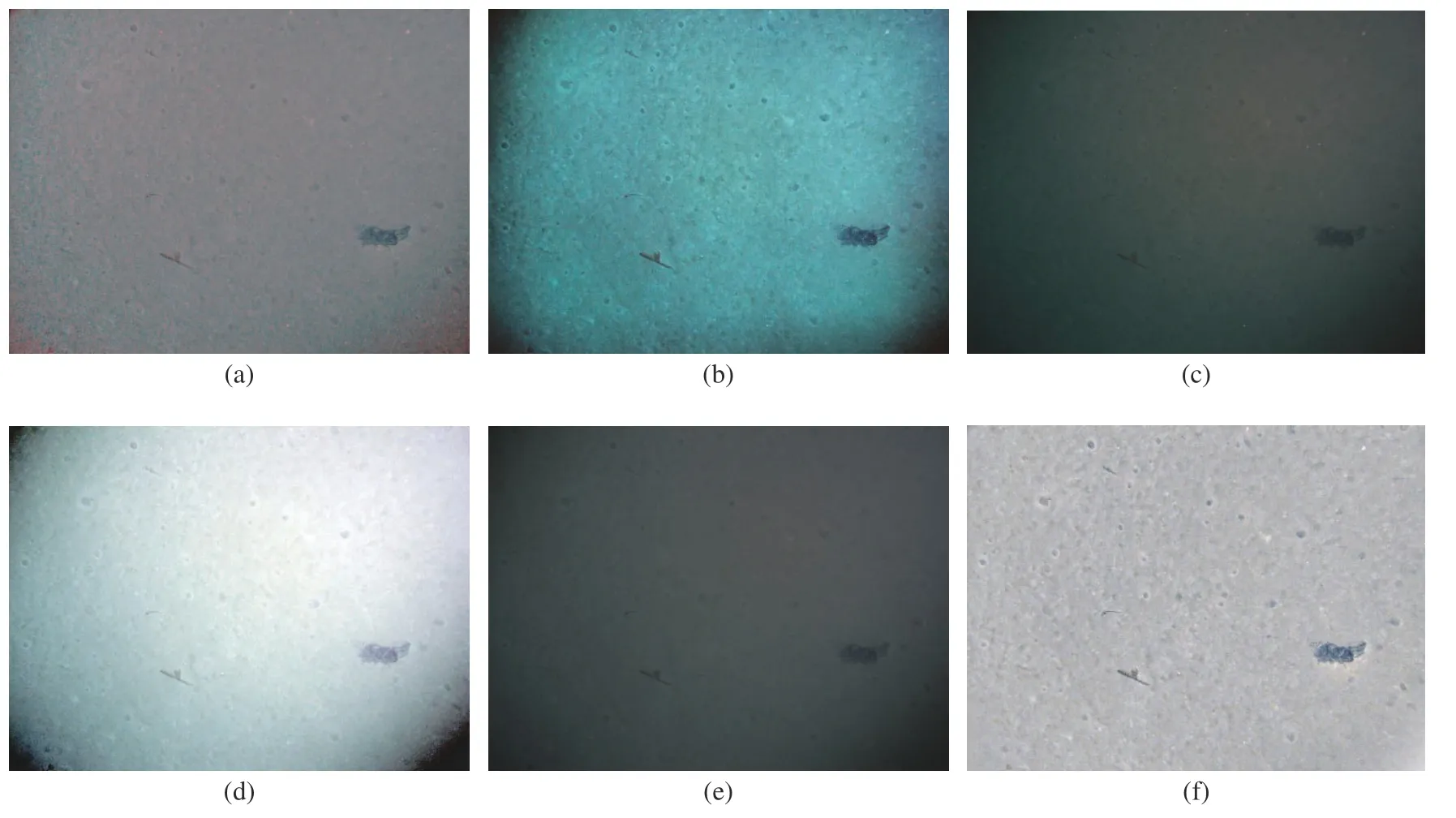
图8 不同算法对参考图像校正的结果。(a)MSR;(b)CLAHE;(c)RCP;(d)RWCGC;(e)UWCNN;(f)本文方法Fig. 8 Comparison of correction results of the underwater image processed by different algorithms. (a) MSR; (b) CLAHE;(c) RCP; (d) RWCGC; (e) UWCNN; (f) The proposed method
图9(彩图见期刊电子版) 所示是与参考图像同批次采集的海底图像以及不同方法的处理结果。图9 第2 行至第6 行分别是利用MSR、CLAHE、RCP、RWCGC 和UWCNN 5 种方法的增强结果。与参考图像的结果类似,在MSR 的结果中(图9 第2行),图像亮度有一定的校正,但原图像偏暗的地方明显出现红色伪影。使用CLAHE 方法增强的图像(图9 第3 行)的对比度有较好的提升,但图像的亮度均匀性和色彩均未得到有效校正,图像四角的亮度仍然偏暗,且整体与原图相似,均偏蓝色调。RCP 的处理结果(图9 第4 行),图像的亮度整体明显偏暗,且亮度的均匀性未得到有效校正,特别是四角区域偏暗。RWCGC 的校正结果(图9 第5 行),图像的偏色问题得到一定程度的解决,同时图像的对比度有较好的提升,但图像亮度均匀性尚未得到有效改善,且因为经过伽马校正处理,图像的亮度和暗部区别更加明显。对于UWCNN 处理后的图像(图9 第6 行),原始图像偏蓝色调的问题有一定的改善,但改善效果有限,图像亮度不均问题未得到有效补偿,处理后的图像较为偏暗。
图9 最后一行是利用本文方法经通道亮度校正、红通道补偿与色彩粗平衡、色彩校正后的增强结果。观察图像可以明显看出,图像的整体亮度比较均匀,无论是图像中心还是图像角部或者边缘,亮度都较好地恢复到相对均匀的程度。图中包含了大量的岩石和不少的砂质表面,对于砂质表面,其色彩经验上应呈现出灰色调,本文方法的增强结果基本上呈现出这一特点。同时,对于海底岩石,呈现出青色调。本文方法的结果无论是图像亮度均匀性校正,还是色调的平衡,都达到了较好的效果。从图7~图9 不同方法处理结果的对比可知,利用本文提出的海底探测光学影像质量恢复方法的处理结果,无论是亮度还是色彩的视觉效果,整体上均优于其它方法。
5.2 客观评价
为了定量评价算法性能,除上述主观评价外,还采用了定量评价方法进行比较。很多学者提出了多种评价指标[2],本文采用无参考的水下图像质量评价(Underwater Image Quality Evaluation,UIQM)[20],以及水下彩色图像质量评价(Underwater Color Image Quality Evaluation, UCIQE)[21]作为定量评价指标。针对水下图像的退化机理和光学成像特点,UIQM 方法采用色彩测量分量UICM、清晰度测量分量UISM 和对比度测量分量UIConM,由加权系数线性组合作为评价水下图像质量的依据。UCIQE 方法基于CIELab 颜色空间,专门用于水下图像质量评测的指标,其值为图像的色度、饱和度和对比度三者加权线性组合的综合指标。UIQM 和UCIQE 具体计算细节详见文献[20] 和文献[21]。表2~表5 给出了参考图像和图9 采用不同方法处理后图像的UIQM和UCIQE 计算结果。

表2 参考图像及其在不同算法处理后的客观评价结果Tab.2 Objective image quality evaluation results of the reference image and images processed by different algorithms

表3 对于图9 第一列影像不同算法的客观评价结果Tab.3 Objective image quality evaluation results of the first column of Fig. 9 processed by different algorithms

表4 对于图9 第二列影像不同算法的客观质量评价指标Tab.4 Objective image quality evaluation indexes of the second column of Fig. 9 processed by different algorithms

表5 对于图9 第三列影像不同算法的客观质量评价指标Tab.5 Objective image quality evaluation indexes of the third column of Fig. 9 processed by different algorithms
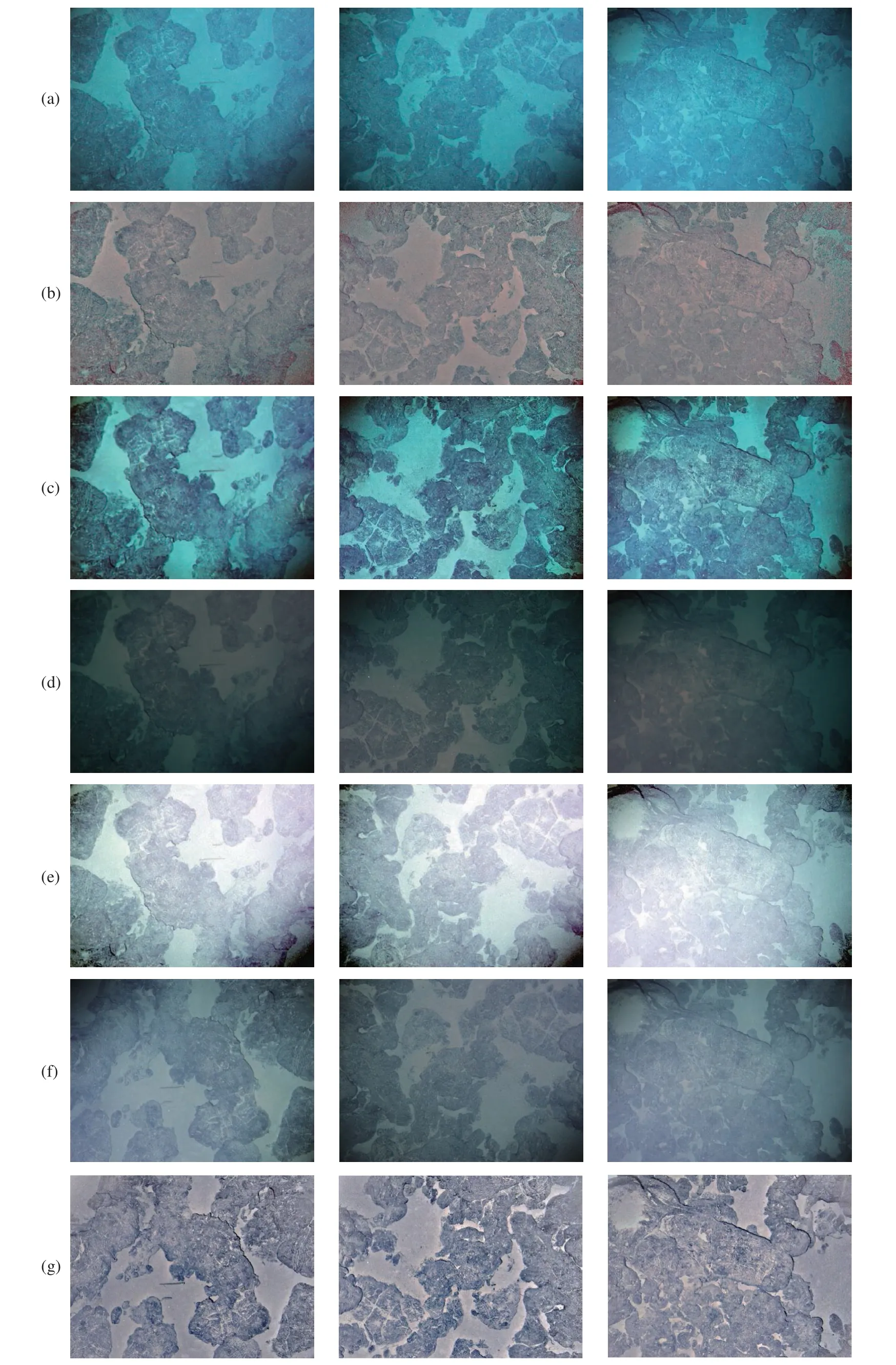
图9 水下图像常用增强处理算法的结果对比。(a)原始图片;(b)~(g)分别使用MSR、CLAHE、RCP、RWCGC、UWCNN 和本文方法的增强结果Fig. 9 Comparison of underwater image enhancement processed by different algorithms. (a) Original images; (b)-(g) the results obtained by MSR, CLAHE, RCP, RWCGC, UWCNN and the proposed method
由表2~表5 可以发现,本文方法处理后的图像UIQM 指标最优;对于UCIQE 指标,因RWCGC 方法参考图像中没有校正亮度,其对比度比本文方法处理后的结果高,本文方法计算指标略低于RWCGC 方法,显著高于CLAHE 等其它方法的结果。目前,就无参考图像质量评价而言,仍然以人眼主观评价为主、客观评价为辅的方式进行。结合对图8 和图9 不同方法的视觉感受,可以看出本文提出的方法具有较好亮度校正和色彩平衡能力,对水下光学图像的增强具有明显的优势和实用价值。
6 结 论
本文通过分析水下光传输机制和光源辐射的物理机理,采用相对辐射校正来剥离并补偿光程差引起的衰减,提出了基于相对辐射校正的主动光学探测图像增强算法。该方法分两阶段增强,在亮度补偿阶段首先对原始图像进行分通道亮度均匀性校正,消除光程差和光源非均匀性造成的图像辐射畸变,使各通道图像照度相对一致。在此基础上进行色彩恢复,对红通道进行自适应预补偿和色彩平衡,然后基于Retinex 方法对图像进行色彩恢复,避免了后续增强红通道过度补偿的问题,还原海底图像的自然色调。实验对比结果表明,本文方法的处理结果图像亮度均匀、色彩自然,整体上具有很好的效果,UIQM 和UCIQE相较原始图像分别提升了4 倍和1.4 倍以上,为海底主动光学探测图像处理提供了一种实用且有效的方法。
