无人帆船柔性风帆技术发展现状与展望
2022-09-06方泽江谭俊哲纪光英袁鹏孙泽王树杰
方泽江,谭俊哲*,2,纪光英,袁鹏,2,孙泽,王树杰,2
1 中国海洋大学 工程学院,山东 青岛 266100
2 山东省海洋工程重点实验室,山东 青岛 266100
0 引 言
人类已有数千年的帆船航海史,随着完全自主航行的无人帆船的研发成功[1-2],帆船又焕发了新的生机。无人帆船可以利用几乎无限的能源(如风能、太阳能和波浪能),是一种集绿色环保、智能、新能源等概念于一身的先进海洋技术平台[3]。各类无人帆船在结构、运动机理和航行控制等方面具有相似性。目前,无人帆船可采用的推进装置包括柔性风帆、刚性翼帆、水轮机[4]、牵引风筝[5]。其中,柔性风帆主要采用薄纺织物制作,是最常用的一种风帆类型[6],具有收放方便、维护简单、质量轻和价格低等优点[7-8]。作为为帆船提供航行动力而在船体上安装的风帆系统,其气动特性对帆船动力性能起着重要作用。无人帆船的小型化、自主调帆特性决定了风帆的气动性能结果需要更精确,同时需要发挥柔性风帆的最佳动力性能。然而,学者们对于柔性风帆的研究大多集中于其在逆风和顺风条件下的气动性能方面,对于无人帆船的柔性风帆系统及其气动性能的全面研究则非常少。
鉴此,本文将首先介绍国际上具有代表性的柔性风帆无人帆船,总结及分析柔性风帆的空气动力学性能研究方法。最后,展望无人帆船及柔性风帆未来发展需要的几项关键技术。
1 柔性风帆无人帆船的发展现状
无人帆船的发展得益于国际赛事和会议的推动,如国际机器人帆船赛[9]、横跨大西洋挑战赛[10]、世界机器人帆船锦标赛(WRSC)和国际机器人航行大会(IRSC)[11]等,这些专业赛事及会议很大程度上促进了无人帆船各项技术的进步[12-13]。目前,国外有许多机构从事无人帆船的研究。本节将梳理近年来最具代表性的柔性风帆无人帆船,对其设计特点及性能进行归纳。
德国富特旺根应用科学大学(HFU)是最早开展柔性风帆无人帆船研究的机构,其在1995 年即开展了RelationShip 研究项目[14]。此后,许多研究机构也开展了类似研究,设计出了许多独具特色的柔性风帆无人帆船。图1(a)为奥地利创新计算机科学学会(INNOC)设计的Roboat I 无人帆船。该船长1.38 m,高1.73 m,总排水量17.5 kg,风帆总面积0.855 m2。其后,INNOC 又设计了一种抗横倾能力很强的ASV Roboat 自主无人帆船[15](图1 (b))。该船长3.75 m,重300 kg(其中龙骨和压载重60 kg,可搭载50 kg 的科学仪器),风帆总面积4.5 m2,甲板上装有285 W 峰值功率的太阳能电池板,以甲醇燃料电池(功率65 W)为备用能源,由皮带传动滑轨组成的线性驱动器调帆,可降低绳索打结的可能性[16]。Stelzer 等[17]以ASV Roboat 帆船为对象,对传统和平衡两种软帆系统的耗能进行了仿真分析,结果表明,后者可节省约三分之二的调帆功率;该团 队还针对ASV Roboat帆船平台进行了航行路径规划、避障算法的开发与试验[18]。
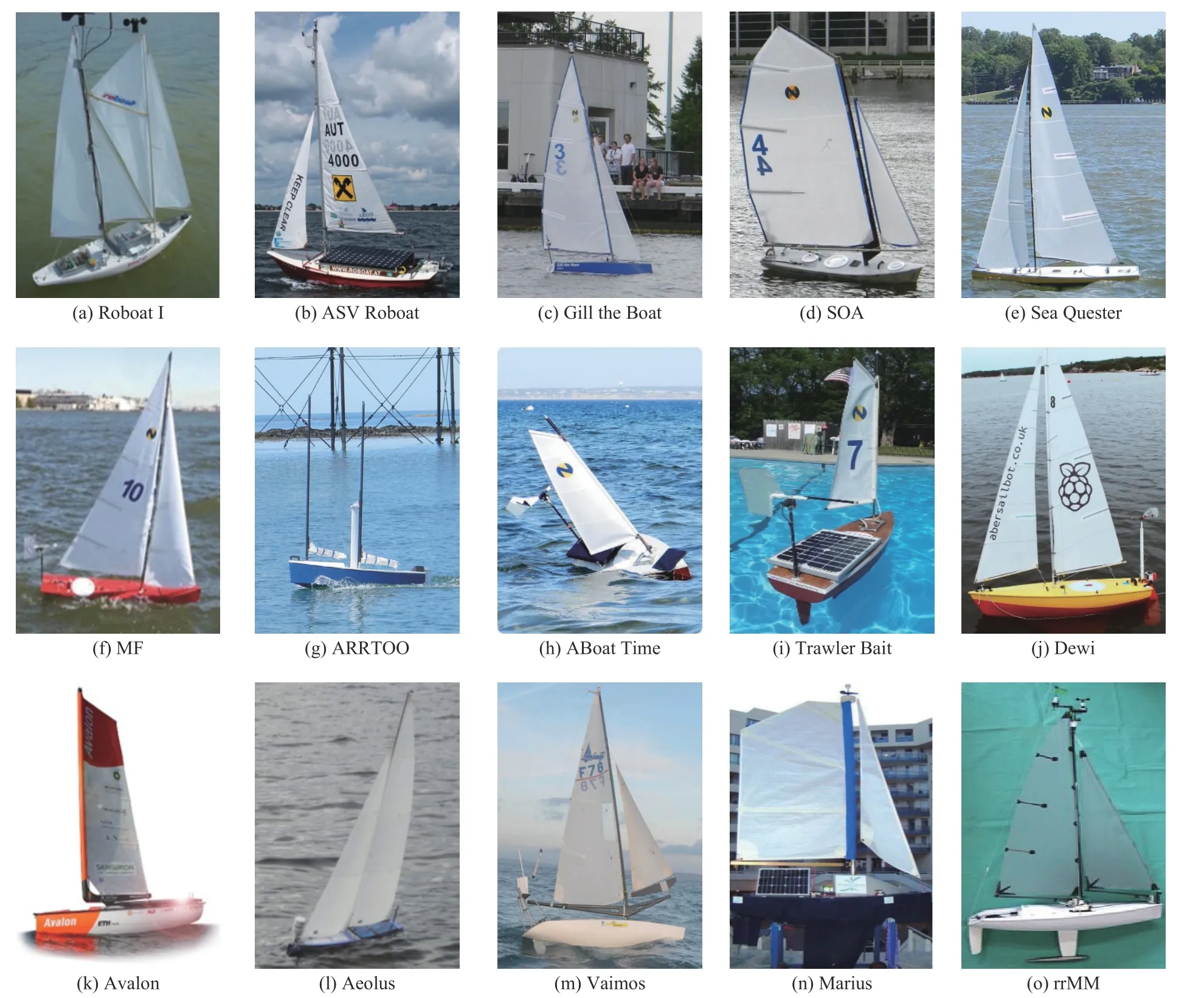
图1 具有代表性的柔性风帆无人帆船Fig. 1 Representative design of unmanned sailboats with flexible sail
图1 (c)为美国海军学院(USNA)设计的一种2 m 长的Gill the Boat 无人帆船,采用传统软帆,风帆面积3 m2[14]。图1(d))为Miller 等[19]在Gill the Boat 基础上推出的SOA 无人帆船,采用平衡软帆,风帆面积1.9 m2,具有活动部件少、结构简单、功耗低、可操纵性能好的特点。USNA 以Gill the Boat 为基准船,还设计出了Sea Quester,如图1(e)所示[20]。该船重25 kg,龙骨长1.5 m,采用传统软帆系统,桅杆由外径17 mm、厚度1.75 mm的OTS 碳管制作,横杆和吊杆使用外径5 mm 厚度1 mm 的不锈钢管,由90 g/m2dynac 材料制作轻质风帆,主帆和前帆面积分别为2.12 和0.91 m2。在Sea Quester 基础上,USNA 又研发了如图1(f)所示的MF 无人帆船,该船长2 m,桅高3.4 m,主帆和前帆的面积分别为1.904 和0.989 m2。Miller 等[21]对MF 无人帆船进行了速度预测程序(VPP)[22]测试和水上测试,结果表明,在较高风速下VPP 对船速的预测置信度低,总体预测值偏高。
图1(g)为英国亚伯大学与USNA 联合研制的ARRTOO 无人帆船。该船原型船长2 m, 采用V 型底船体、双桅杆、双三角帆的设计,桅杆由外径25 mm 的OTS 管制作,螺旋桨驱动,螺旋桨推进时通过齿形皮带传动降帆,在4.85 m 的甲板上安装有峰值功率260 W 的光伏太阳能电池板和平均功率45 W 的Forgen 1 000 NT 垂直轴风力发电机[23]。
USNA 和亚伯大学还联合研制了一种小型、廉价和易于制造的MaxiMOOP 无人帆船[24],用于海洋学研究和自主航行系统的开发。该船基本船长1.2 m,重约20 kg,有多种风帆样式,面积为0.24 ~1 m2,可搭载多种有效载荷,稳定性好,耐用性高。
此外,USNA 在MaxiMOOP 基础上又推出了ABoat Time 和Trawler Bait 两种无人帆船,如图1(h)和图1(i))所示。两船均采用1.2 m 的基本船长,由连杆机构调整单面风帆,面积分别为0.27 和0.3 m2。甲板均安装有太阳能电池板为船载锂电池充电,安装倾角约15°,最远航程分别为477 和2 113 km[10,25]。前者安装有两种平均功率为15 和3 W的太阳能电池板,后者安装有平均功率为20 W的太阳能电池板。英国亚伯大学的设计则采用了1.3 m 船长方案,推出了采用传统软帆、帆高2 m 的Dewi 无人帆船,如图1(j)所示。
Miller 等[25]以MaxiMOOP 无人帆船作为风帆系统测试平台,进行了不同展弦比(AR)及帆边条数的风帆性能的VPP 测试和水上测试。VPP 测试结果表明高展弦比(AR= 6)的风帆性能较好,水上测试结果表明低展弦比(AR= 3)的风帆性能较好。
Schröder 等[26]基 于MaxiMOOP 船 的1.2 m 基本船体,设计了一种低成本无人帆船,船体材料为泡沫聚苯乙烯,重13 kg。采用平衡软帆,桅高1.65 m,横杆长1.15 m,两面帆面积分别为0.287 5和0.2 m2。
图1(k)和图1 (l)分别为瑞士苏黎世联邦理工学院(ETH ) 推出的Avalon 和Aeolus 无人帆船。前者最初是作为自主穿越大西洋而设计[27-28],船长3.95 m,采用平衡软帆,桅高5.7 m,风帆面积8.4 m2,由安装在甲板上的回转轴承支撑和驱动,结构简单、可靠。后者为一种自主控制的微型无人帆船,船长1 m,船头安装有AIRMAR WS-200WX气象站,可获取更准确的风数据[29-30]。
图1 (m)为法国国立高等先进技术学校和海洋开发研究院共同研制的Vaimos 无人帆船。该船长4 m,采用平衡软帆,搭载有温度传感器,可进行两种深度的温度测量[31]。
图1 (n)为Anthierens 等[32]设计的Marius 无人帆船,船长2 m,桅高2.4 m,主帆和前帆面积分别为2.2 和0.7 m2。该船创新性设计主要体现在控帆方案,采用了甲板安装的圆形导轨滑块作为调帆机构,并配有旋转电位计,能够对主帆的帆位角进行绝对角度的测量。
葡萄牙波尔图大学设计的FSAt 自主无人帆船船长2.5 m,桅高3.4 m,桅杆、横杆和吊杆采用碳纤维管,风帆总面积3.7 m2。甲板安装的太阳能电池板平均功率为45 W,可为两节97 Wh 锂电池充电(船载电源)[33]。
图1(o)为德国吕贝克大学面向算法开发而设计的rrMM 微型柔性风帆无人帆船。该船船长0.53 m,总重1.03 kg,小巧轻便,成本低[34]。Neumann等[35]以rrMM 为试验平台,在船头搭载摄像头,基于图像航行策略进行了地平线、浮标等检测。Hertel 等[36]以rrMM 为试验平台,搭载各类传感器,在55 天中航行了110 余小时,采集到200 余万条航行时的风况、帆船航行状态等数据。
综上所述,柔性风帆无人帆船项目主要以学术研究为目的,首先是为了满足教学需要,使学习者能够将造船和系统工程技术运用到实际项目之中,其次是参加竞赛以收获经验和发展小型自主无人帆船技术,再就是力求使项目得到进一步发展,作为水上移动监测和探测平台。
目前,柔性风帆无人帆船大多采用单体龙骨型的船体,整体阻力小、重量轻、扶正力矩大是此类无人帆船龙骨和压载的设计目标,且还具有如下特点:
1) 一般在船艉安装单个艉舵,但也有例外,如Avalon 无人帆船采用了2 个艉舵,以实现各种航向的转向效果;
2) 采用太阳能电池板为船载电池充电,作为船载电池的能量来源;
3) 控制系统软硬件、传感器具有可扩展性;
4) 着力研究获能效率高、耗能低、调帆容易的柔性风帆系统作为无人帆船的主要动力装置,从风帆样式、调帆机构等方面进行柔性风帆系统的创新设计,如平衡软帆、ABoat Time 的连杆机构调帆、Marius 的圆形导轨滑块机构调帆等。
2 柔性风帆系统
风帆系统是帆船研究者关注的焦点,对于能源自给自足及船载能源有限的无人帆船而言,研究获能效率高和耗能低的风帆系统至关重要[12]。脱胎于现代帆船的柔性风帆无人帆船,二者在获能机理、风帆样式、帆布材料等方面的区别并不大。然而,后者更加小型化,可自主调帆,这就要求其柔性风帆系统具备轻质、控制功耗低、风帆易于收放等特点。
无人帆船的柔性风帆系统主要由舵机、绳索、支索、桅杆、布帆、横杆和吊杆等部分组成。无人帆船的风帆系统从材料上可分为柔性风帆和刚性翼帆,从平衡性上又可分为不平衡风帆和平衡风帆,绝大多数刚性翼帆都被视为平衡风帆。本节将分析的是柔性不平衡风帆(如传统软帆)和柔性平衡风帆(如平衡软帆)系统,其中使用传统软帆的历史最悠久,也最常用。图2 为柔性风帆的基本样式,图中所示的平衡软帆系统的桅杆可绕底部旋转,调整主帆和前帆的尺寸(L2>L1),使主帆受力略大于前帆受力,整个风帆的受力中心(CE)位于桅杆后面,具有很大的节能潜力[17]。
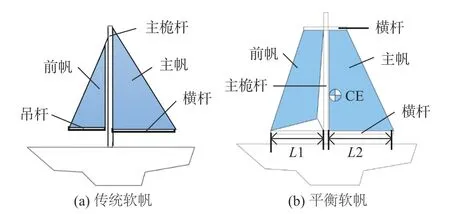
图2 柔性风帆基本样式Fig. 2 Basic styles of flexible sail
2.1 形状、尺寸和材料特点
随着无人帆船技术的发展,学者们开发出了多种不同的风帆和形状,如ASV Roboat 无人帆船使用的是最常用的传统软帆。平衡软帆是一种新的风帆形式,其因具有许多优点而得到了广泛使用,如IBOAT[37],Avalon,Vaimos 等。帆面的样式通常为三角形(如Dewi),也有四边形(如ABoat Time)和形状不规则的多边形(如SOA)。
风帆尺寸应根据船长来选取,以保证无人帆船获得足够的动力及稳定航行能力。图3 为针对柔性风帆无人帆船绘制的船长和风帆面积统计图。图中统计的柔性风帆无人帆船船长均不超过4 m,柔性风帆的类型多为传统软帆。其中,帆船船长为1~1.2 m 的,风帆面积多为0.27~0.6 m2;船长1.3~1.5 m 的,风帆面积多为0.8~1.2 m2;船长为2 m 的,风帆面积多为1.7 ~3 m2;船长超过2 m的,风帆面积一般在2 m2以上。
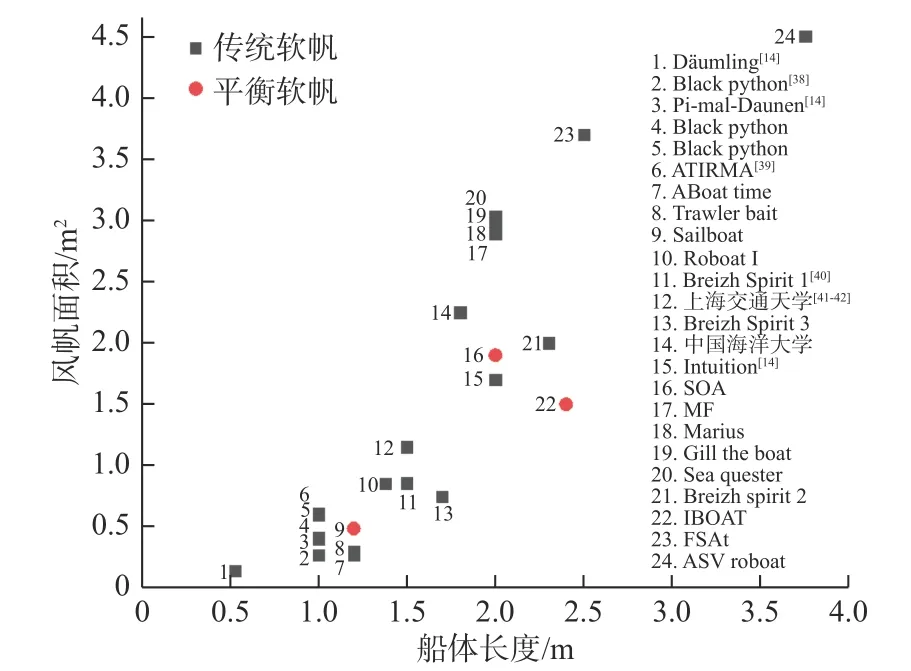
图3 柔性风帆无人帆船长度和风帆面积统计Fig. 3 Statistical diagram of length and sail area of unmanned sailboat with flexible sails
采用棉和亚麻天然纤维作为帆的制作材料始于19 世纪。在紫外线照射下,这两种材料会退化,其吸水性也很强。随着生产技术的进步,各类型风帆的制作材料转向了低成本的合成纤维,如尼龙、聚酯、芳纶等。Calì等[43-45]通过拉伸试验获得了常用帆布的材料特性,如表1 所示。通过纤维在经、纬度方向的不同杨氏模量值可知材料的正交各向异性,这为研究者选择帆布材料,或进行柔性风帆材料对无人帆船空气动力学性能影响的研究提供了有价值的参考数据。表1 中Ewarp,Eweft分别为经、纬度方向的杨氏模量值。
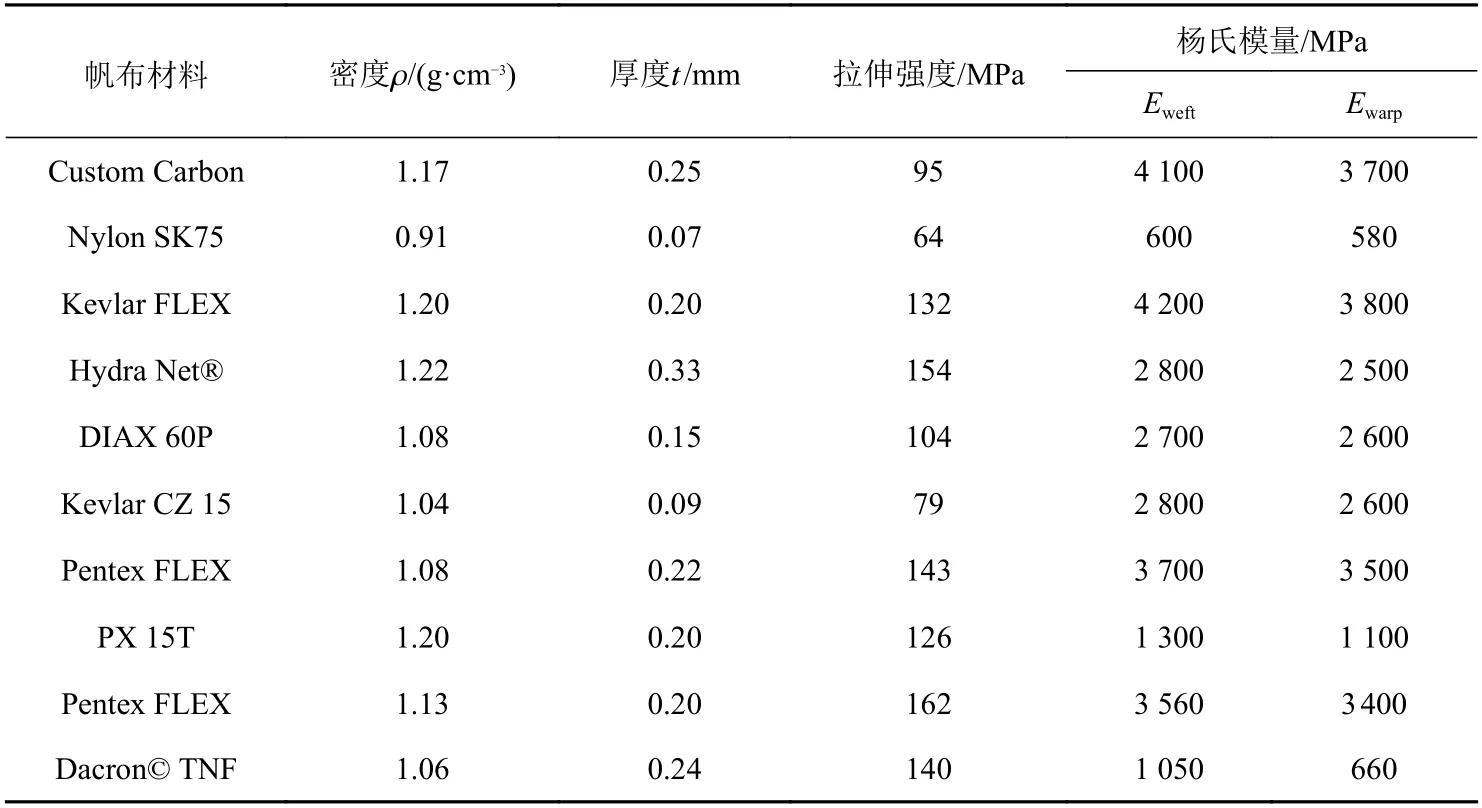
表1 常用帆布的材料特性Table 1 Characteristics of commonly-used sail cloths
2.2 安装和固定方案
一般方案是将桅杆插入在船体内部预先加工好的套筒内,从甲板延伸至船底,桅杆顶部通过3 根左右的支索固定在甲板上,使风帆系统具有更高的刚度。风帆与桅杆、横杆等之间的连接一般是在帆面上制作扣眼并通过绳索捆绑。图4 所示为几种风帆安装方法及固定的实例。
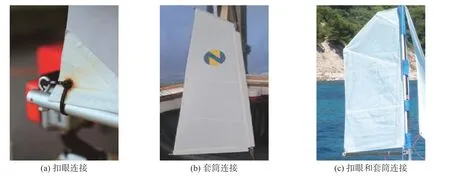
图4 风帆安装与固定实例Fig. 4 Installation and fixing example of sails
2.3 调帆方案
根据已有的文献和实际运用案例可知,绝大多数柔性风帆无人帆船都采用绞盘绳索调帆系统,如图5 所示。图5 中主帆和前帆使用的调帆绳共用一个结点。有的调帆绳在两侧各用一个结点(如Sea Quester),这是为了降低绳索打结的可能性。尽管各用一个结点方式的技术相对成熟,使用最广泛,但是复杂且还是存在绳索打结的可能性。还有一小部分无人帆船采用了连杆机构(如ABoat Time)或直接由回转轴承支撑和驱动来进行调帆(如Avalon)。采用这两种调帆方式的无人帆船其主桅杆可转动,结构简单,机械效率高,更容易在同一艘无人帆船上兼容使用柔性风帆和刚性翼帆,但调帆机构较重,会增加帆船的负载。
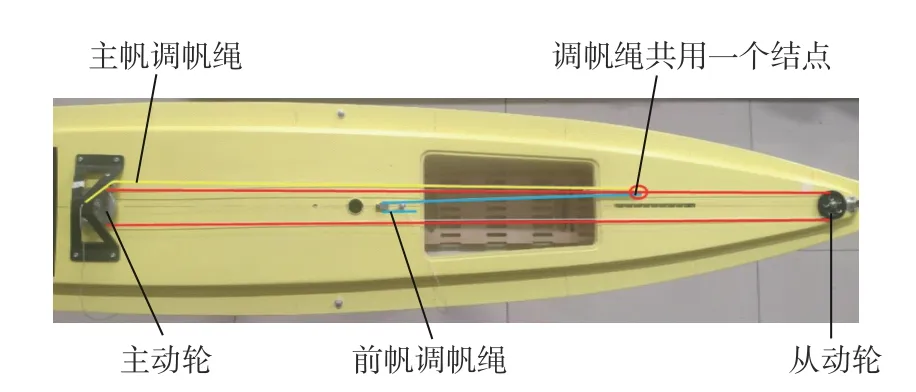
图5 绞盘绳索调帆系统Fig. 5 Sail trim system using winches and ropes
为了避免绳索缠绕,INNOC 研究小组为ASV Roboat 无人帆船研制了由皮带传动的滑轨组成的线性驱动器,如图6 所示。该无人帆船的主帆驱动绳的减速比为2:1,滑轨的最大行程75 cm,主帆和前帆驱动绳分别被收紧和放松了150 和75 cm。调整前帆的第1 个导向轮安装在固定于桅杆前的横杆上,导向轮可在横杆上左右滑动,带动前帆向左右两侧摆动,使前帆调整更容易且获能更大[16]。
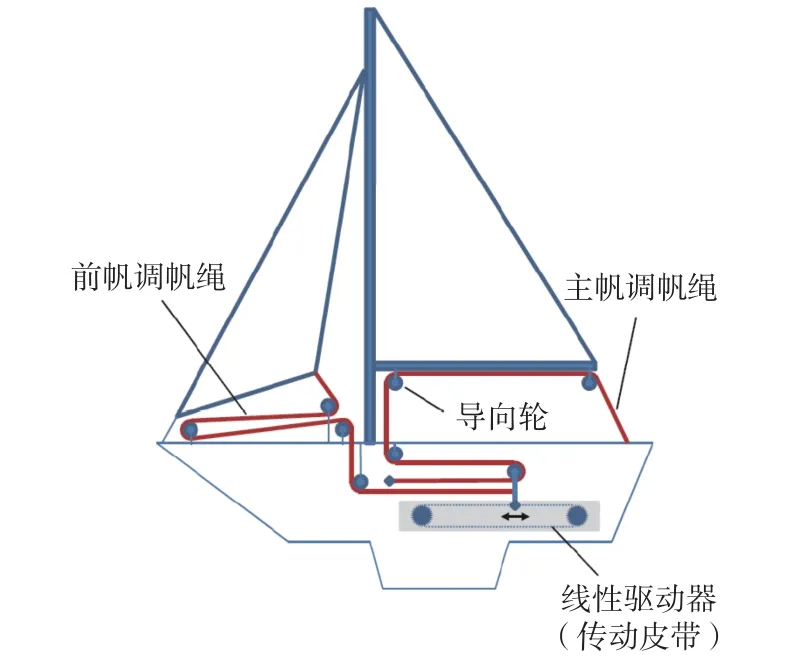
图6 ASV Roboat 无人艇线性驱动器[16]Fig. 6 Linear actuator on ASV Roboat[16]
3 柔性风帆空气动力学性能研究方法
风帆是无人帆船航行的推进器,风帆空气动力学性能对无人帆船的动力性能起着关键作用。柔性风帆研究的复杂性主要体现在:
1) 柔性风帆薄而柔软,在风载荷作用下其形状变化无常且变形较大,属于非线性大变形问题,同时需要不断调整风帆角度以获取持续的航行动力。
2) 帆船与两种流体相互作用,既要考虑水动力学特性又要考虑空气动力学特性[46]。柔性风帆的形状可以用关键截面的帆形参数表征,如图7所示。柔性风帆空气动力学性能通常用力系数等无量纲系数来表征,攻角是空气动力学分析的主要参数,气动力系数随着攻角的变化而变化。
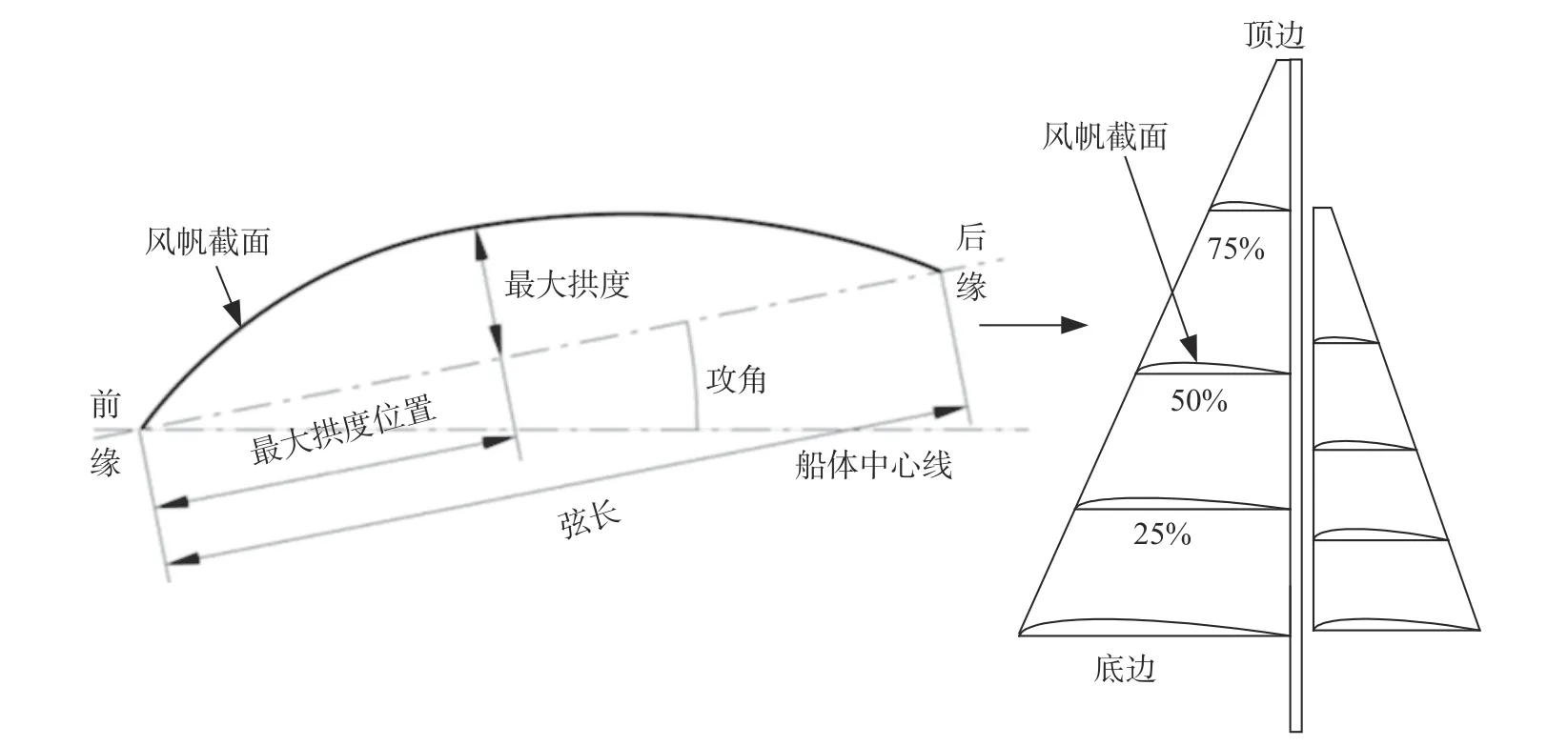
图7 帆形参数和形状模型Fig. 7 Geometric parameters and shape of sail
3.1 影响因素
风帆气动性能受风速、风向等外界环境因素和风帆调整的影响,同时柔性风帆的材料、帆布的面板布置和纤维取向、设计形状也是影响柔性风帆性能的重要因素。采用具有合理的帆面板布置、纤维方向的高性能轻质材料[44]制作风帆能够显著提高帆船的动力性能。Calì等[43-44]通过试验测试获得了10 种常用帆布的材料特性,先后研究了帆布的材料特性和帆面板布置、纤维方向对柔性风帆空气动力学性能的影响。Miller 等[25]通过比较不同展弦比、帆边条数的单面风帆的VPP 测试结果与水上测试结果,评估了不同设计形状的风帆性能。在柔性风帆无人帆船航行过程中,由于柔性风帆的材料特性和对风帆的调整,其帆形参数会发生变化,从而力系数和受力中心位置也会发生变化,最终导致风帆的气动性能发生变化。
3.2 柔性风帆飞行形状测量
帆在航行过程中的真实形状,也称为飞行形状[47]。帆的设计形状和飞行形状具有很大差异,采集帆的飞行形状很有必要[48],这是因为其可为数值模拟提供特定风况下风帆的真实形状,为准确预测空气动力学性能和验证数值模拟结果提供宝贵信息。
学者们已经使用坐标测量机[48]、光学轮廓测量技术[49]、雷达检测系统[50]、摄影测量法[45-47,51-52](图8(a))和飞行时间(time of flight, TOF)技术[53-55](图8(b))来测量柔性材料的形状。其中摄影测量法被认为是相对准确和快速的测量方法,但存在需进行大量的数据后处理、遮挡以及需要大量照相机等缺点。而新出现的基于TOF 的测量方法,采用的是激光扫描仪对整个风帆飞行形状进行测量,具有无接触、范围广、对环境光线不敏感且适用于室内室外等优点。
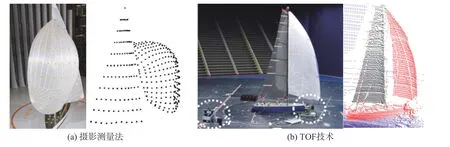
图8 飞行形状测量方法[54]Fig. 8 Solutions for flying sail shape reconstruction[54]
3.3 研究方法
当前用于无人帆船柔性风帆空气动力学性能的研究方法包括数值模拟[56]、风洞试验[57-59]和水上试验。其中,水上试验是指无人帆船在真实水上环境下的试验,此方法费时、费力,成本较高,但试验结果最可靠。 风洞试验是指运用比例模型或原型在风洞中进行的试验,其试验结果较可靠,但成本也很高,且还会受试验条件的限制。风洞循环水槽试验是目前采用的最新试验研究方法,试验水槽由多功能风洞和分层流循环水槽两部分构成,二者既可独立使用,也可相互关联,可形成风浪流及分层流环境条件下船舶与海洋结构物的流体动力性能试验能力,同时,还可对无人帆船进行水动力学特性和空气动力学特性试验研究。运用仿真软件(如计算流体力学(CFD))进行数值模拟则是应用最广泛的方法,该方法使用方便、成本较低,但通常需要试验验证,模拟结果才具备可靠性。图9 所示为柔性风帆空气动力学性能研究基本技术路线框图。
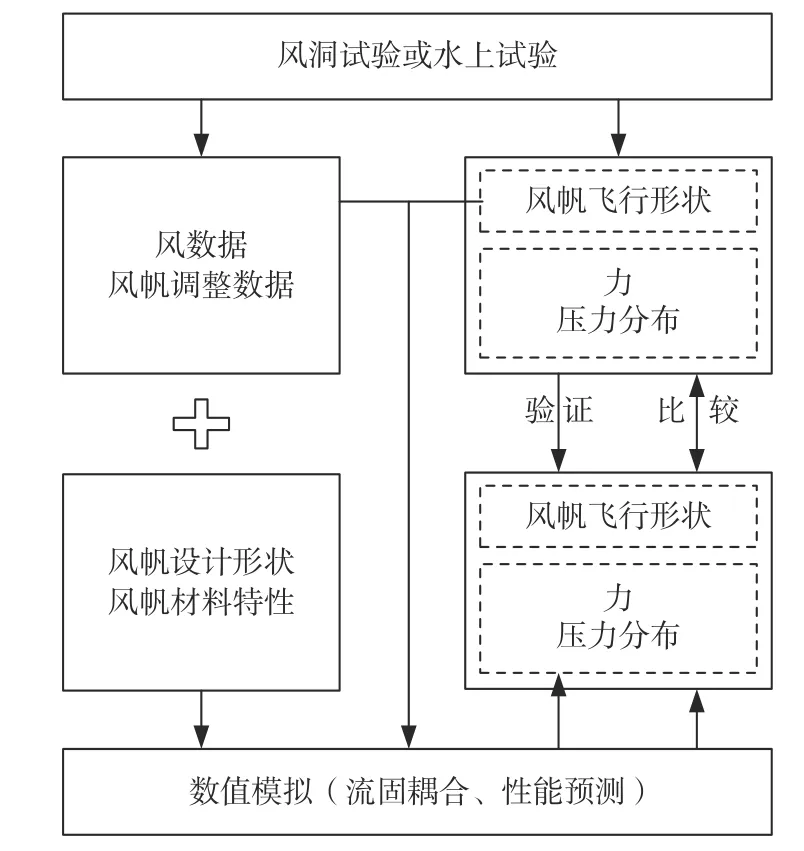
图9 柔性风帆空气动力学性能研究基本技术路线Fig. 9 Basic technical route for research on aerodynamic performance of flexible sails
通过CFD 数值模拟,研究者可以得到风帆的最优设计方案[60]。在优化设计中,考虑到柔性风帆非常薄,可将风帆结构模型视为无厚度面或壳体的结构。在研究低雷诺数下湍流模型对空气动力学性能预测方面,Aftab 等[61]研究了湍流模型对低雷诺数机翼的影响,Persson 等[60]研究了湍流模型对低雷诺数柔性风帆的影响,二人得出了相似的结论:Spalart-Allmaras 模型能更准确地预测风帆的升力和阻力,与实验数据吻合较好;k-ω SST模型预测显示流动分离现象会提前发生,在大攻角下对升力和阻力的预测不佳,而采用AVANTI无黏性流体模型[52,62]的计算量小,常被用于风帆设计的初步阶段。
Bak 等[63]将风帆视为壳体结构,运用CFX 和LS-DYNA 软件进行了柔性风帆变形的流固耦合分析。Fossati 等[46]对柔性风帆的1:10 比例模型进行风洞试验研究,由红外摄像系统采集飞行形状,测量了逆风条件下的风帆性能。Calì等[44]通过CFD-CSM 方法对大三角帆进行流固耦合分析,评估了顺风条件下风帆的性能,通过水上试验,使用载荷传感器测力及摄影测量法采集飞行形状,然后对比验证数值模拟结果。Fossati 等[53]和Bayati 等[55]在逆风条件下进行柔性风帆的风洞试验研究,在帆面上粘贴薄而软的压力条纹进行力和压力分布的测量,基于TOF 技术,采用激光扫描仪测量柔性风帆的飞行形状,将飞行形状用于CFD 数值模拟,更准确地预测了风帆的空气动力学性能。
为准确评估风帆性能或优化风帆设计,在柔性风帆空气动力学研究中,飞行形状及其力和压力分布的测量是需要解决的3 个要素。从前文可知,当前用于无人帆船柔性风帆空气动力学性能的研究方法包括数值模拟、风洞试验和水上试验。试验研究结果的可靠性高。风洞试验或水上试验的作用在于,通过将测得的特定工况下柔性风帆的飞行形状、力和压力分布与在相同工况下数值模拟的相应结果进行比较,可全面评估风帆性能,验证数值模拟的准确性;此外,测得的在特定工况下柔性风帆的飞行形状,还可为数值模拟提供真实的形状模型,从而更准确地预测风帆性能。风洞试验是运用得较为普遍的方法。在试验中,目前主要采用摄影测量法或TOF 技术捕获柔性风帆在特定工况下的飞行形状,使用力传感器和压力条纹来测量力和压力分布。然而,在现有的研究中仍主要关注的是顺风或逆风条件下风帆的气动性能,并未考虑实际航行下的各种工况,而即使是帆船水上试验,考虑到高昂的成本和条件受限等因素,也仅是固定在岸边进行研究。
在无人帆船柔性风帆的空气动力学性能研究中,数值模拟方法方便、成本低。目前,用于空气动力学性能预测的计算平台主要有CFX,FLUENT和STAR-CCM+。柔性风帆的形状模型是性能预测的关键。由于柔性风帆本身的材料特性,在实际航行时,风帆形状随不同工况的变化而改变,难以对其进行捕获和测量,故通常假设风帆在各个工况下均为不变形的刚性帆面,如此则难以准确预测风帆性能,无法发挥不同类型风帆的最优性能。针对柔性风帆在风载荷下的非线性大变形问题,用非线性有限元分析程序(如LS-DYNA 和AUTODYN),可以相对较好地计算柔性风帆的变形,近似地构建出风帆变形的形状。
总之,研究无人帆船动力性能需要结合运用空气动力学和水动力学技术,而目前在研究中采用的数值模拟和试验方法都未系统地研究风帆与船体的耦合作用,在此方面仍需进一步研究。
4 总结与展望
本文介绍了国际上具有代表性的柔性风帆无人帆船,总结和分析了柔性风帆的空气动力学性能研究方法。在无人帆船中,柔性风帆是运用得较广泛的风帆,具有刚性翼帆无法替代的优点。风帆系统和风帆空气动力学性能是决定无人帆船性能的重要因素。目前,无人帆船领域中的一些技术仍未达到期望的目标,有待进一步提高,例如坚固的船体、耗能低和获能效率高的风帆、鲁棒性和可靠性强的软硬件、具有长航时和在各种海洋环境下的适航性,以及可搭载的海洋监测仪器。展望无人帆船及柔性风帆的未来发展,需在如下方面开展关键技术的研究。
1) 柔性风帆的气动性能。
柔性风帆因形状多变而给其气动性能的研究带来了困难,运用试验或数值模拟方法测量得到与不同工况相适应的风帆飞行形状尤为重要。目前,对于在逆风条件或顺风条件下现代帆船的风帆气动性能研究已取得重要进展,但针对无人帆船柔性风帆气动性能的研究案例极少。事实上,上述两种帆船的研究方法和原理是相通的。无人帆船柔性风帆尺寸较小,随着试验条件的完善,结合数值模拟与试验,未来可进一步探究不同工况下风帆的性能、帆装与空气的耦合以及帆装与船体的耦合作用,建立较为全面的风帆形状与风帆性能的数据库,这对指导制定控帆策略、提高帆船操纵性都具有重要意义。
2) 可靠和高效的风帆技术。
风帆类型。现有的风帆有多种类型,既有传统软帆、平衡软帆,也有刚性翼帆。平衡软帆的节能潜力很大,刚性翼帆绝大多数被视为平衡风帆。柔性风帆的材料特性、展弦比、固定和调帆方案对风帆性能影响很大,一般使用的绞盘绳索系统驱动方式容易造成绳索打结,若主帆和前帆的调帆绳各用一个结点,则可减少绳索打结的可能性,而有些无人帆船采用的机械调帆(如Marius的圆形导轨滑块机构、ASV Roboat 的皮带传动线性驱动器和ABoat Time 的连杆机构)又会增加机械结构的复杂性和帆船负载。因此,有必要提出更具创新性的调帆方案,设计出与航行要求相适应(如竞赛侧重速度,远洋航行侧重耐疲劳性),可兼顾使用柔性风帆和刚性翼帆的支撑以及驱动方案并共享一套软硬件的风帆类型,如此既能够满足不同航行的要求,又可以节约开发成本。
风帆快速收放技术。对于风帆-螺旋桨混合驱动的无人帆船,在螺旋桨驱动模式下,可以收帆降阻;对于水下、水面两用的刚性翼帆无人帆船,在执行水下作业时,需能够将翼帆快速收入船体中; 在强风航行条件下,可以调整风帆尺寸,以达到显著减小帆船航行阻力的目的。
3) 船载能源管理策略。
若要保证无人帆船既可长期滞留海上执行任务,又可为种类繁多、用途各异的船载传感器的运行提供充足能量,则需要设计出合理的船载能源管理策略。例如,船载的风速仪、姿态仪惯性测量单元(IMU)、伺服电机编码器等传感器可在不同工况下采集大量的数据,用于优化控制无人帆船航行的设置参数,从而优化航行性能;温度传感器、水质监测仪器、水听器等船载传感器可以将采集的数据用于科学研究。
总之,船载能源管理策略的研究需要重点考虑获能和耗能这两个问题。前者的关键是解决航行时蓄电池的充电问题。目前,船载太阳能电池板组、小型风力发电机、水轮发电机均可实时为蓄电池充电。 后者需要解决机械自动驾驶系统(如风向标自动转向系统)在不消耗功率的情况下使无人帆船保持期望航向的问题。
为了保持无人帆船的内在方向稳定性(即无论初始航向如何,都无需频繁控帆或使用复杂的机械操纵系统而能够返回到期望的航向),可利用的理想方案有:直接将尾翼附着在风帆上;优化调帆机构的设计,使其质量轻、可靠性和操纵效率高;合理规划各类船载仪器的工作与休眠策略。
混合驱动技术(例如风帆-螺旋桨混合驱动)对长期航行有着重要作用,但螺旋桨电机运转需要耗能,因此,流体获能-驱动关键技术的研究可成为潜在的解决方案,目标是使安装在帆船下的水轮机在风帆驱动模式下能够作为水轮发电机为电池充电,而在螺旋桨驱动模式下,水轮机作为螺旋桨推动帆船航行。
4) 避险研究。
主要针对无人帆船航行、自身设备的安全性和可靠性而提出。无人帆船航行时难免会受到大的风浪流影响,因此有必要研究出帆船的自保功能(例如风帆快速收放技术),这在一定程度上可以起到保护帆船的作用。另外,自检功能可以用于监测和诊断船载设备的运行状态,如将冗余的执行器、传感器等引入无人帆船,当组件出现故障时可以自启动冗余组件,以保证无人帆船持续航行。
5) 航行控制算法研究。
通过路径规划确定起始点与目标点间的最佳路线和转向点。无人帆船路径规划需要解决的关键技术包括:可靠地检测和规避障碍物,在地图上预先标出静态障碍物(例如暗礁、岛屿等);实时检测动态障碍物(例如航行船、流动浮标等);同时,还要考虑风浪流、航行目的等条件。
通过路径跟踪计算出执行器所需输入,以跟踪预先确定的路径,并优化航速,缩短航行耗时。控舵(航向控制与航迹保持)和控帆的策略研究需要解决的问题是路径跟踪。通常,在操纵过程中,舵和帆是分开控制的,舵控制采用模糊PID 控制方法,帆控制多采用经验公式。研究控帆策略需要基于风帆的气动性能研究结果。在控帆策略方面,现代帆船的使用历史悠久,积累了丰富的经验,可以通过采集船员在控舵和控帆方面的经验数据,建立数据库并借助机器学习方法学习船员的帆-舵控制策略,对帆-舵进行耦合控制,以此提升无人帆船的路径跟踪性能。
综上,低成本、长航时、多功能、安全可靠、全自主航行是无人帆船各项关键技术的研究目标。
