群智能优化算法反演概率积分参数的性能比较与分析
2022-09-02黄金中李靖宇滕超群李世保
黄金中 王 磊 李靖宇 蒋 创 滕超群 李 忠 李世保
(安徽理工大学空间信息与测绘工程学院,安徽 淮南 232001)
概率积分法(Probability Integral Method,PIM)预计模型是我国矿山开采沉陷研究中应用较广泛且较为成熟的方法[1-2],如何精确反演PIM参数是提高开采沉陷预计精度的关键[3]。近年来,随着计算机应用科学的发展,各种群智能算法不断涌现,并且不少群智能优化算法已经在PIM参数反演中得到应用。群智能优化算法是一种受到大自然生物群行为、现象的灵感启发而演化的全新的智能算法,作为一种新型的自然元启发式算法,现阶段,不少学者尝试采用遗传算法[4]、粒子群优化算法[5-6]、狼群算法[7]、人工蜂群算法[8]、果蝇算法[9]、蚁群算法[10]、混合蛙跳算法[11]等群智能优化算法实现PIM参数的精确反演研究。群智能优化算法反演PIM参数具有计算机编程易实现、求参效果好等优点。由于不同的群智能优化算法具有不同的特点,各算法因各自的理论基础和模型的差异不仅使得参数反演结果不同,而且也表现出不同的参数反演性能。此外,在以往群智能优化算法反演PIM参数的应用中,仅通过模拟试验及工程实例验证反演精度,缺乏对各类算法参数反演性能的进一步分析。
结合现有成果分析,并结合课题组已有研究发现,狮群算法(LSO)、蝙蝠算法(BA)、人工鱼群算法(AFSA)在PIM参数反演中相对于已有的遗传算法、粒子群优化算法等来说,应用较为薄弱。LSO算法计算机编程简单、模型易懂、求参稳定性较好、算法速度快;BA算法具有参数较少、速度快、模型简单和鲁棒性好等优点,但易早熟收敛,求参精度不高,后期进化容易陷入局部解;AFSA算法全局搜索性能较强,可以准确地找到可行解,参数设置范围较广,对参数初始值要求不高,但由于受到视野、步长等因素影响,很大程度上使得人工鱼活动范围受到制约,收敛速度慢,容易陷入局部最优解。为此,本研究从抗随机误差性能、抗粗差干扰性能、观测点缺失的抗干扰性能、参数波动性和全局搜索性能等方面对LSO、BA、AFSA3种算法对于PIM参数的反演性能进行详细分析,进一步评价各算法用于反演PIM参数的适用性。
1 PIM原理分析
PIM是我国“三下”采煤中应用较为经典的开采沉陷预计方法[12],其原理如图1所示。
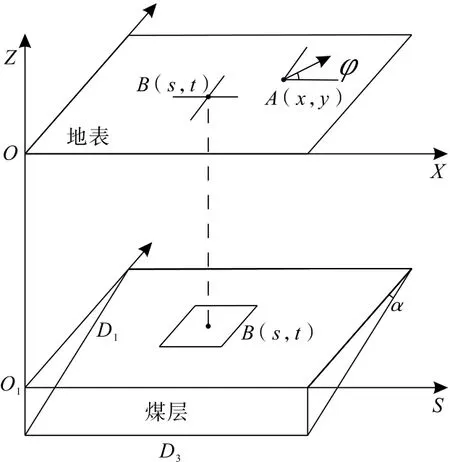
图1 地表和煤层坐标示意Fig.1 Schematic of surface and coal seam coordinates
根据PIM原理,假设在煤层处开采一个微小的单元,导致地面上任意一点发生的下沉移动变形值可表示为

式中,We(x,y)为整个工作面开采引起地面任意点A(x,y)发生的下沉移动变形值,mm;m为工作面开采厚度,m;q为下沉系数;H为工作面平均采深,m;H1、H2分别为工作面上边界采深、工作面下边界采深,m;D3、D1分别为工作面走向、倾向长度,m;α为煤层倾角,(°);θ为开采影响传播角,(°);tanβ为主要影响角正切;Sa、Sb、Sc、Sd分别为工作面的上、下、左、右拐点偏移距,m;s为煤层处开采一个微小单元B的横坐标,m;t为微小单元B的纵坐标,m;Wmax为矿区充分采动条件下地表最大下沉值,mm;erf(·)为概率积分法的误差函数;W0(x)、W0(y)分别为有限开采条件下,位于X轴和Y轴上任意位置的A(x,y)点下沉移动变形值,mm。
沿着φ方向的水平移动变形值可表示为

式中,φ为沿着X轴正向逆时针与已知方向的夹角,(°);r1、r2分别为下山方向和上山方向的主要影响半径,m;Ue(x,y,φ)为整个工作面开采引起地面任意点A(x,y)沿着φ方向发生的水平移动变形值,mm;U0(x)、U0(y)分别为有限开采条件下,位于X轴和Y轴上任意位置的A(x,y)点的水平移动变形值,mm。
在工作面地质采矿条件参数:采厚m、平均采深H、走向长度D3、倾向长度D1、煤层倾角α已知的情况下,根据PIM参数:下沉系数q、主要影响角正切tanβ、水平移动系数b、开采影响传播角θ、上拐点偏移距Sa、下拐点偏移距Sb、左拐点偏移距Sc、右拐点偏移距Sd,可获取地表任意一点因该工作面开采而发生的变形值。
1.1 群智能优化算法
1.1.1 狮群算法
狮群算法是一种新型群智能优化算法[13-15],以模仿狮群群体捕获猎物习性为基础,将其设计演化迭代计算。狮群算法按照相应比例将狮群分为雄狮、雌狮、幼狮3个部分。雄狮代表最优适应度值个体。在该算法中,将最佳的适应度值赋值给雄狮,一定比例值定义为幼狮,其余的适应度值赋值给雌狮。该算法由狮群中不同类型的狮子位置不断更新迭代,每个猎物(食物源)的位置作为待优化的可行解,构建适应度函数,从而求解全局最优值。
1.1.2 蝙蝠算法
蝙蝠算法由YANG[16]于2010年提出,是一种基于迭代寻优和蝙蝠自然习性灵感的启发性群体智能优化算法[17]。该算法模仿蝙蝠捕猎时,利用超声波回声定位原理搜寻猎物,能够有效地避开阻挡物,甚至在黑暗的环境里快速搜寻、定位猎物方向和位置,并快速地捕杀猎物。通过更新蝙蝠自身位置、速度等方面,在建立解的搜索空间内寻求问题解的最优值。
1.1.3 人工鱼群算法
近年来人工鱼群算法备受学者青睐,是一种模拟鱼群行为方式的群体智能优化算法[18-21]。该算法模拟鱼群有4种行为:随机行为、觅食行为、聚群行为、追尾行为,鱼群中每个个体位置为待求解,通过比较4种行为方式的视野食物浓度大小,通过将目标函数值置于公报板内,实现问题的最优化求解。
上述3种群智能优化算法的参数反演流程如图2所示。

图2 群智能优化算法流程Fig.2 Flow of swarm intelligence optimization algorithm
1.2 参数反演构建
在煤层开采前,通常沿工作面的走向和倾向共布设2条水准观测线。在工作面开采过程中,定期对观测站进行水准测量,来获取实测下沉值和水平移动值分别记为Wxy、Uxy。结合工作面地质采煤条件及PIM参数,根据式(1)、(4)求出预计下沉值与水平移动值分别记为Wxy1和Uxy1。利用群智能优化算法反演PIM参数,以P={q、tanβ、b、θ、Sa、Sb、Sc、Sd}为群智能优化算法的目标解空间,在解空间中生成种群,在每一次迭代中群体在目标解空间中搜索,不断循环直到满足算法要求,最后输出最优解,判定最优解的标准以适应度函数值最小作为准则。以开采点实测值与预计下沉值之差的平方和加上实测值与预计水平移动值之差平方和为基准的适应度函数可表示为

式中,Wxy、Uxy分别为实测下沉值和水平移动值,mm;Wxy1、Uxy1分别为预计下沉值和水平移动值,mm;R为适应度函数。
2 精度验证
2.1 模拟试验
2.1.1 试验数据
设计模拟工作面地质采矿条件为:煤层倾角为5°,平均开采深度为400m,采厚为2m,模拟矩形工作面走向长度D3=800 m,倾向长度D1=300 m。依据经验选取符合本矿区PIM参数值:下沉系数q=0.7,主要影响角正切tanβ=2,水平移动系数b=0.3,开采影响传播角θ=87°,拐点偏移距为Sa=Sb=Sc=Sd=40 m。在工作面开采区域上,移动盆地内沿着走向和倾向各设计1条监测线(N与M监测线),沿走向、倾向主断面分别布设55/32个监测点,相邻监测点距离为30m,走向观测线长为1 620 m,倾向观测线长为930 m,工作面与监测点位置的对应关系如图3所示。
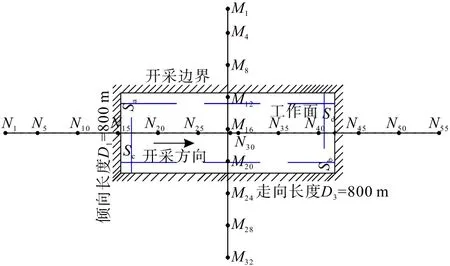
图3 模拟工作面测线和点位布设Fig.3 Layout of the monitoring lines and points of the simulated wokring face
2.1.2 试验结果
以预计值作为参数反演的数据,分别计算N、M线上监测点的地表沉陷值(参考工作面开采信息),采用上述群智能优化算法反演PIM参数,分别进行了10次参数反演,其结果见表1。

表1 参数精度对比Table 1 Comparion of the parameter accuracy
分析表1可知:
(1)3种群智能优化算法反演PIM参数,参数q、tanβ、b、θ的拟合中误差分别低于 0.03、0.12、0.03、1.4,其中,q、b参数精度比较高,拐点偏移距Sa、Sb、Sc、Sd的拟合中误差均在3.0~8.0 m范围内。
(2)各算法反演PIM参数q、tanβ、b、θ的相对误差均不高于1.6%、3.2%、4.1%、0.3%,LSO算法的拐点偏移距相对误差最大不高于2.0%,BA、AFSA算法的拐点偏移距相对误差均不高于6.0%;LSO、BA与AFSA 3种算法反演参数取均值后,LSO算法的拟合水平移动值与下沉值中误差为3.85 mm,拟合中误差最小,参数反演精度较高,AFSA算法拟合中误差为10.34 mm,参数反演精度最低。
2.2 工程应用
2.2.1 研究区概况
结合安徽省淮南市顾桥矿南二区1414(1)工作面的地表实测数据[11],对文中LSO、BA与AFSA 3种群智能优化算法性能进行对比研究分析。该工作面地质采矿情况为:煤层倾角为5°,平均采厚为3 m,平均采深为735 m;工作面走向长度约为2 120 m,倾向宽度约为251m。走向和倾向观测线共布置145个监测点和6个控制点,相邻监测点距离分别为60 m/30 m,走向观测线长为3 480m,倾向观测线长为1 500m,矿区1414(1)工作面观测站布置如图4所示。

图4 矿区1414(1)工作面观测站布设Fig.4 Layout of the observation station of 1414(1)working face in mining area
2.2.2 试验结果分析
基于实测变形值,采用上述群智能优化算法进行PIM参数反演。为避免试验的偶然性,在相同条件下,分别进行10次参数反演,以反演参数的均值作为最终结果,求取参数中误差,其结果见表2。并据此绘制了下沉与水平移动值拟合曲线,如图5所示。

表2 工程应用求参结果对比Table 2 Comparison of the parameter inversion results for engineering application

图5 工程应用下沉与水平移动值拟合曲线及误差结果对比Fig.5 Comparison of fitting curves and error results of subsidence and horizontal movement values in engineering application
分析表2以及图5可知:
(1)利用群智能优化算法反演PIM参数取其平均值,参数q、tanβ、b均值最大不超过1.9,从参数反演均值可以看出,LSO与BA算法反演参数数值相近,LSO算法相对于AFSA算法反演参数均值略有差别;反演参数均值互差在上拐点偏移距和左偏移距反演结果波动性很大,AFSA算法的上拐点偏移距与另外两种算法互差较大,互差结果最大为5.541 5,其差值约占平均值的83.6%。
(2)3种算法反演PIM参数求取监测点预计水平移动值与实测值的绝对误差在200 mm以内,预计下沉值与实测下沉值的绝对值误差最大不超过275 mm;3种群智能优化算法参数反演精度均比较理想,但相比之下,LSO和BA算法的下沉值与拟合下沉值曲线、水平移动值与拟合水平移动值曲线基本与实测值曲线相吻合(图5),较为稳定;LSO、BA与AFSA算法的下沉值与水平移动值的拟合中误差分别为112.88、115.71、114.20 mm,3种群智能优化算法求参精度相近,均满足工程应用精度要求。
3 多角度分析
经模拟试验及工程实例验证,上述群智能优化算法均满足工程应用精度需求。为了更充分探究其在PIM求参中的性能,分别从验证抗随机误差性能、抗粗差干扰性能、观测点缺失的抗干扰性能、参数波动性和全局搜索性能等方面对3种群智能优化算法性能进行分析。
3.1 抗随机误差性能分析
以2.1.1节模拟工作面为例,人为地将N、M线上观测站的下沉、水平移动值分别增加中误差为10 mm、15mm的随机误差。随后采用上述3种群智能优化算法反演PIM预计参数,分别进行10次参数反演,其结果见表3。

表3 抗随机误差分析结果Table 3 Results for anti-random error analysis
分析表3可知:在每个监测点的下沉值、水平移动值中加入随机误差的前提下,LSO、BA与AFSA算法反演参数相对误差均有所增加,各个算法反演PIM参数q、tanβ、b、θ的相对误差分别不高于 2.7%、3.0%、12.0%、0.7%,拐点偏移距的相对误差分别不超过4.1%、7.8%、5.8%、2.1%;从反演拟合中误差看,AFSA算法的拟合水平移动值与下沉值中误差为23.16mm,拟合中误差最大,BA、LSO算法的拟合水平移动值与下沉值中误差分别为13.38 mm、11.18 mm,显然LSO算法拟合中误差相比BA和AFSA两种算法略小,因此,LSO算法能更好地抵抗随机误差影响。
3.2 抗粗差性能分析
将N、M线上观测站的最大下沉值点以及拐点处分别增加粗差200 mm后,采用3种群智能优化算法分别对设置粗差的数据进行了PIM参数反演,结果见表4。
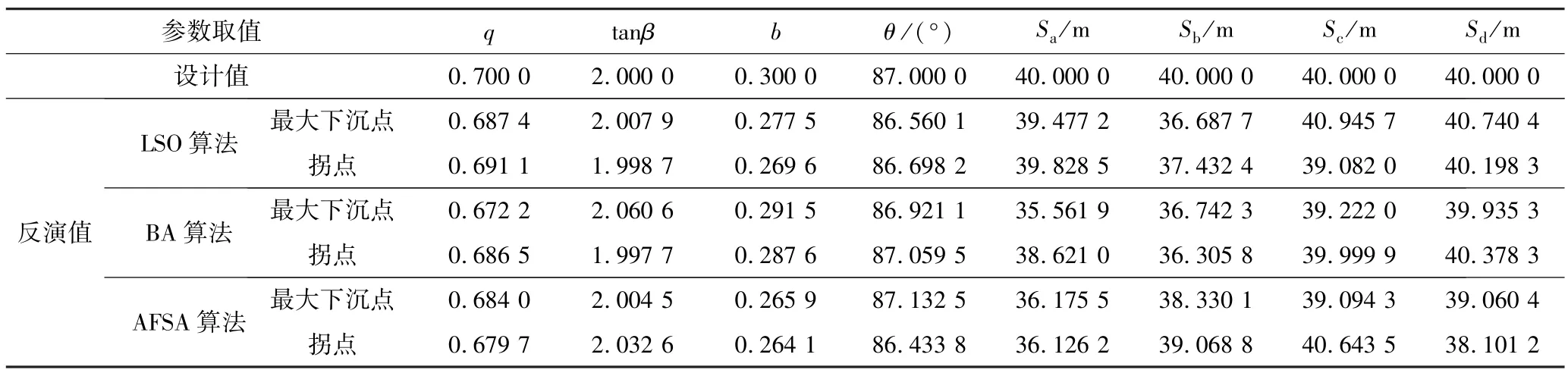
表4 抗粗差分析结果Table 4 Results for anti-outlier analysis
分析表4可知:在最大下沉点、拐点处加入粗差后,LSO、BA与AFSA算法反演的PIM参数精度有所 降低,各算法参数相对误差增大,但从整体来看,除了水平移动系数、上拐点偏移距值偏大,水平移动系数的相对误差最大值为12.0%以外,其他参数相对误差较小。在该拐点处、最大下沉点处分别增加200 mm的粗差后,其BA算法的拟合水平移动值与下沉值中误差分别为10.76 mm、14.36 mm,拟合中误差最小,BA算法抵抗粗差的干扰能力最优;LSO算法的拟合水平移动值与下沉值中误差分别为18.09 mm、14.95 mm,LSO算法抵抗粗差的干扰能力优于AFSA算法;AFSA算法的拟合水平移动值与下沉值中误差分别为23.60mm、21.77mm,拟合中误差最大,AFSA算法抵抗粗差的干扰能力最弱。
3.3 观测点抗缺失分析
在野外对地表观测站采集数据时,因很多不利因素例如自然环境、维护力度等方面造成少量的观测站地标被损害或者移动,从而使得观测数据不齐全,观测站数据的缺失在很大程度上影响了参数反演结果[22]。
将下沉曲线划成3个区域:h为观测线边缘至拐点处,g为拐点处至最大下沉点处,e为最大下沉点以后区域。 对h、g、e3个区域分别随机地缺失20%监测点,采用3种群智能优化算法对缺失后的数据反演PIM预计参数,结果如表5所示。
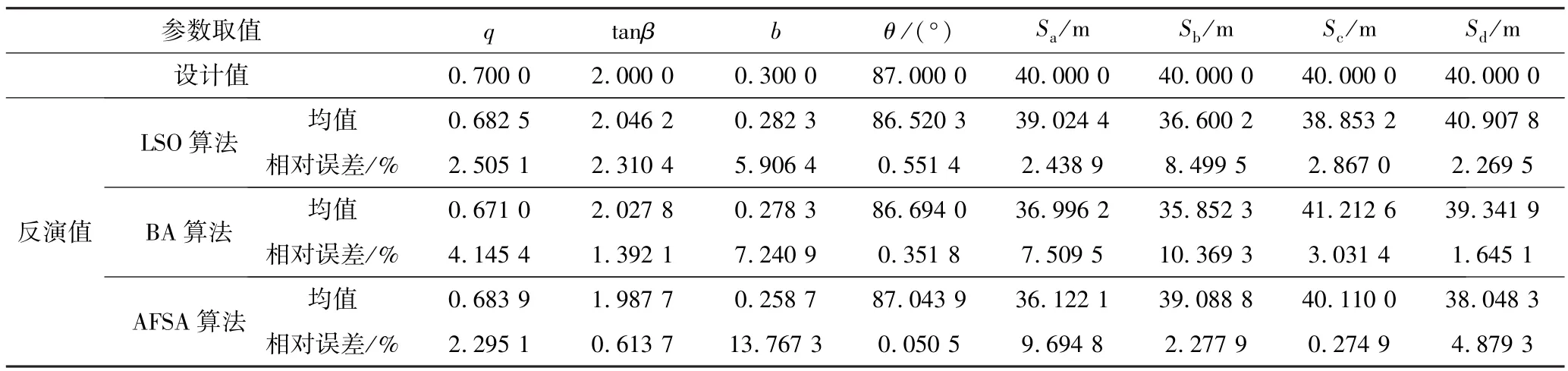
表5 抗点缺失分析结果Table 5 Results for anti-point missing analysis
分析表5可知:在h、g和e3个区域分别随机地缺失20%监测点的前提下,由于点位的缺失,3种算法的影响传播角影响最小,相对误差均不超过0.6%,其他参数因观测站数据的缺失,对反演参数影响呈递增趋势,AFSA算法反演参数水平移动系数的相对误差相对其他参数偏大,为13.7673;从反演拟合中误差看,LSO、BA与AFSA算法对缺失后的数据反演的拟合水平移动值与下沉值中误差分别为14.24、19.29、25.70 mm,LSO算法的拟合中误差最小,因此,LSO算法抗缺失能力优于BA和AFSA算法。
3.4 参数波动性分析
为验证群智能优化算法反演参数的稳定性,以3.1节增加了随机误差的数据为基础,来探讨在随机误差影响的前提下各参数的波动性状况,利用群智能优化算法进行30次反演试验,求取PIM 8个参数,随着迭代次数不断增加,观察8个参数的收敛情况,结果如图6所示。

图6 参数波动性分析Fig.6 Parameter volatility analysis
分析图6可知:3种算法在随机误差的基础上,LSO、BA与AFSA算法反演PIM参数结果拐点偏移距的波动性较大,其余参数波动性较平稳;另外,从图中可看出LSO算法反演PIM预计参数结果总体波动性优于BA与AFSA算法。
3.5 全局搜索性能分析
为降低偶然误差对试验结果的影响,在相同环境条件下,将反演参数解空间范围扩大为原来的2倍,然后对群智能优化算法进行反演试验,群智能优化算法反演PIM参数时的全局搜索能力对比见表6。

表6 全局搜索能力分析结果Table 6 Analysis results of global search capability
分析表6可知:在扩大一定反演参数解空间范围的前提下,群智能优化算法反演PIM参数的相对误 差都有所增大,参数q、tanβ、b、θ相对误差最大值分别小于 1.7%、4.9%、6.1%、1.4%,Sa、Sb、Sc、Sd相对误差均在8.7%以内;从反演拟合中误差看,AFSA算法的拟合水平移动值与下沉值中误差为8.54 mm,拟合中误差最小,LSO算法的拟合水平移动值与下沉值中误差为24.32 mm,拟合中误差最大。综上可知:就全局搜索能力而言,AFSA算法全局搜索能力最强。
4 结 论
(1)传统的概率积分法优化算法精度不高,虽然近年来也有不少群智能优化算法被引入其中,但考虑到不同算法具有不同的特征,在具体研究中,无法实现各类算法的高效优选。LSO、BA、AFSA 3种群智能优化算法较为新颖,尽管在PIM参数反演中相对于已有的几类算法而言涉及较少,但未来在PIM参数反演中具有较大的应用潜力。
(2)LSO算法在抗随机误差干扰影响、观测点缺失的抗干扰能力方面以及参数结果总体波动性方面较BA、AFSA算法有一定的优势;BA算法在抗粗差干扰能力方面优于LSO、AFSA算法;在全局搜索性能方面,随着反演参数解空间范围扩大为原来的2倍,用AFSA算法反演概率积分预计参数的精度优于LSO、BA算法。研究结果为有效选择合适的群智能优化算法进行概率积分参数反演提供了参考。
(3)各种智能优化算法在概率积分法参数反演过程中,在求参精度、稳定性、求参效率方面等表现出的性能有所不同。在工程应用中为追求更好的求参性能,将上述3种算法进行组合或分别与其他算法进行组合应用,寻找一种普适性或时效性组合智能优化算法,需要进一步研究。
