船闸通航安全分析及过闸能力的提升方法
2022-09-01李国伟
李国伟
佛山市樵桑联围南海区水利所
基于目标运动特性,数字图像处理中的目标检测技术分为运动目标检测和静止目标检测。根据运动目标的图像序列,运动目标检测包括静止背景和运动背景。
对于船闸通航安全分析而言,目标检测包括静止船舶和运动船舶,当船舶等待开门时,忽略了船舶的微小漂移,应将其视为静止目标检测[1]。船舶通过船闸时,应将其视为运动目标检测,由于阳光对河道的强烈影响,即使在同一地点、不同时间、不同天气条件下,背景图像也可能不同。闪光、反射、波动波和照度都对图像质量有影响。在对某船闸图像分析和仿真的基础上,提出了一种兼顾运动目标检测和静止目标检测的算法。
1 河道范围的确定
在船闸通航安全分析中,河道是视野的焦点,但由于摄像机将各种场景放置在岸边会使船舶检测复杂化,因此通过对河道的检测来确定船舶检测的图像处理范围是必要的[2]。步骤如下:
首先,采用分段线性灰度变换作为图像增强,提高了信道边缘的灰度,弥补了传输和过渡过程中图像质量的下降。
第二,将数学形态学应用到灰度膨胀的计算中,由于河流中或河岸上的干扰如河岸的反射和河流表面的杆灯闪烁,都与河道边缘平行,如果只使用边缘检测,提取的边缘可能不是真实的边缘,甚至一些有用的河道信息可能在干扰信息中丢失。由于阴影通常位于河流表面或河岸内部,而且河道和河岸是各向同性的,数学形态学有助于最大限度地消除阴影的干扰,并保持河道边缘和河岸边界。并且下移边缘检测可以尽可能平滑阴影和干扰,从而达到良好的效果,提取的边缘必须是真实的。
最后,利用Hough 变换对河道进行线性检测,确定河道范围。
图1给出了河道图像数学形态学计算的模拟效果,a 为船闸原始图像;b 为灰度增强图像;c 为通过数学形态计算得到图像;d 为提取边缘的最终效果。

图1 边缘提取
图2显示了不同情况下固定河道处理范围的模拟效果。a、b、c 为原件;e、d、f 给出了通过河道检测的定位结果,其中两条白线标记了河道的范围。
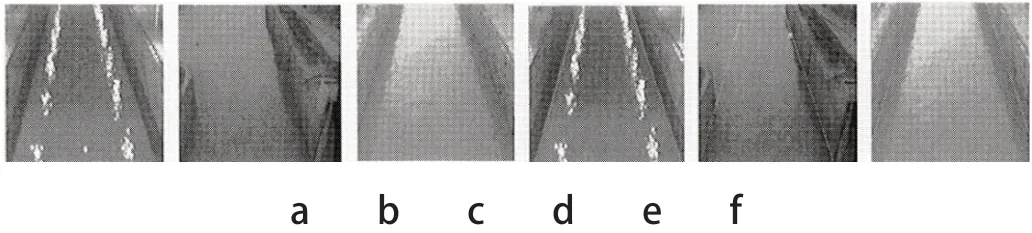
图2 固定处理范围
2 运动目标检测
2.1 方法
运动目标的图像序列比静止目标的图像序列为目标检测提供了更有价值的信息,在静止背景下的运动目标检测中,通常采用差分和自适应的运动目标检测方法[3]。差分法是对同一背景、不同时间拍摄的两幅图像的对应像素进行灰度差分计算。该方法简单有效,但要求背景绝对不变或基本不变。当背景杂波起伏较大时,自适应运动目标检测方法更为有效。在图像和参考图像的杂波背景在空间上相对应的条件下,利用相关特性,调整权值去除生成量中的相关元素,从而压缩背景杂波和相关噪声,配准和光流法是目前比较流行的方法,配准通常从稳像和配准开始。利用配准后的图像序列,可以像静止背景下的运动目标检测一样进行目标检测。光流法可以通过运动速度来分辨不同的物体和背景,但由于其计算量大、实时性差,因而不切实际。
2.2 计算
在船闸通航安全分析系统中,视场是固定的(摄像机安装后保持静止),因此本文研究了静止背景下的运动目标检测问题。
假设两幅相邻图像f(ij),f.(i.j),对应像素灰度差绝对值dif(ij),(i=1,2,…;M;j=1,2…N;M、N表示高度和宽度),然后k帧差图像(gAij)生成

其中TdiflTdifh表示假定阈值的下限和上限。
对于差分图像中运动信息的提取,提出了差分紧度的概念,差分紧度决定是否存在运动船舶。COM 由三部分组成:1)水平紧致度(COMH):它是差分点的水平投影;2)垂直紧致度(COMV):它是差分点的垂直投影;3)面积阈值(AT):考虑到杂散点可能达不到物体差分所需的密度,至少应该是这样。

其中Peakh 和Peakv 是指主最大值可以扩展到零的像素总数;Total 是差异点的总和。

式中,CONTH 为水平浓度阈值;通过差分图像的计算和统计,如果COM 为假,则没有提取出有用的运动信息,需要采用静止目标检测的方法来检测船舶;如果COM 为真,则有用信息已被提取,可能存在移动船舶或因卡基闪烁的涟漪而导致的虚假移动。为了在不影响真实运动信息提取的前提下,最大限度地减少由闪烁引起的误识,提出了一种削峰直方图的方法。实验表明,对于有闪烁的图像,直方图中的灰度峰往往与其他部分分离。反射越强,趋势越明显,提出在直方图中剔除反射引起的峰值。在此过程中,如果部分对象和ReflectionRay 比例重叠,则一定会丢失一些信息。但实验表明,如果拦截点选择得当,这种损失就无关紧要了。将公式(1)应用于截获的灰度图像进行差分计算,如果根据公式(5)判断COM 为真,则检测到运动船舶。另外,本文还提出运动信息的提取是从背景中提取的,需要采用静止目标检测的方法。
3 静止物体检测
对于静止目标检测,图像处理技术可以用来提取单个图像中目标的边缘、形状或纹理等特征。通过对这些性质的定性和定量分析,可以得出正确的结论。
3.1 固定船舶检测
河道通常局限于某一区域,该区域的灰度是均匀的。
在通道中必须打破这种一致性。提取图像边缘,确定河道范围,利用小区域的灰度平均值和灰度方差,建立判断河道内船舶检测均匀性的准则。
将信道划分为一定数量的小范围。假设范围isK.K 的数目既不能太大也不能太小。当它太大时,判断可能太微妙;当它太小时,很难提取信息,并将每个小范围细分为两个子范围(左和右)。分别计算:A(i.lef)、Var(i.lef)、Av(iright)、Var(iright)、Av(i,整体)、Var(i,整体),其中,Aw(i.)表示第i小范围的灰度平均值,Var(i.)表示第i小范围的灰度方差,i=1,2,…,K。
按照步骤缩小范围,重复计算灰度平均值和方差,统计时根据灰度平均变化增量和灰度方差的分布来划分置信区间(如图3 所示)。

图3 平均增量、方差分布和置信区间标记
在图中,一个u;σ(i=1,2,3)分别指设置灰度平均变化增量和灰度变化阈值。区间统计量缩小后,较大的置信区间取代以前较小的置信区间,P最大,A最小。通过对大量图像数据的统计分析,得出置信区间O(A)、O(B)…、O(G)是无目标的,置信区间O(M)、O(N)、O(O)、O(P)可能有目标的结论。剩下的是不确定范围,需要进一步计算。对于指定的范围I、J,记录每次计算所得范围的最大灰度方差,假设为varmax;对于指定的范围K、L,记录每次计算所得范围的最大灰度平均值,假设为avmax;对于指定的范围H,同时记录varmax和avmax。以上升半梯形函数为例。

当然,其他形式的函数,如上升半正态函数也起作用。
在得到每个区间的置信度O(=1,2..K)后,根据O>OT0,统计出3 取2 或5 取3 的置信阈值。如果在连续3 个(或5 个)范围内,2 个(或3 个)范围符合0,>0-,则检测到静止船舶。否则,就没有船了。
3.2 特殊阴影处理
由于形状上的直线通常表征一些特殊的阴影,如河岸或桥梁的反射,因此可以通过边缘图像的Hough变换来提取切向路径。然后对目标范围进行线性划分,将上述静止目标检测方法应用于各自范围内的目标检测[4]。由于这种阴影不影响运动信息的提取,因此在运动目标检测中不需要这种处理。
4 结语
本文提出了一种用于船闸通航安全分析的船舶检测算法,提高了系统的安全性和可靠性。本文通过图像边缘检测来确定河道的处理区域。提出了一种基于削峰直方图的方法来抑制船闸内水流闪烁产生的虚假运动信息。通过计算差分图像的投影密度函数,提出了差分紧度的概念,有助于更精确地检测运动船舶。利用河道中几个小区域直方图的统计特性:灰度平均值和灰度方差,实现了对静止船舶的检测,并用置信域对检测结果进行了判断,计算机仿真表明,它对船闸中船舶的检测有很大的贡献。