基于改进人工鱼群算法的无人机红外巡检线路规划
2022-09-01王红星黄郑钱波徐淇李波
王红星, 黄郑, 钱波, 徐淇, 李波
(1.江苏方天电力技术有限公司,江苏,南京 211102;2.国网江苏省电力有限公司常州供电分公司,江苏,常州 213000)
0 引言
输电线路作为保障电力运行的重要设备,加强对线路的巡检尤为重要。传统的输电线路巡检主要包括人工巡视、直升机巡视等,但由于输电线路广、巡检地形复杂,给人工巡检带来极大的难度和不确定性,如采用直升机巡检,费用也相对较高。因此,无人机红外巡检开始进入电力公司视野,并成为当前输电线路巡检重要方式。通过无人机巡检,可克服复杂地形和困难天气因素的影响,基本实现全天候24 h的巡检,但在无人机红外巡检中,核心问题为无人机路径规划。常用的无人机红外巡检路径规划包括A*算法、Apf算法,如:曹建秋等[1]采用改进变异灰狼算法对无人机路径规划进行优化,得到航迹代价小、效果稳定的无人机飞行路径,但该方法存在计算量大的问题;王琼等[2]采用Apf算法获得了反馈性强的无人机航迹,但该方法在环境复杂的情况下容易出现局部极小值问题,因此无人机航线品质无法得到保证。近些年来,人工鱼群算法被广泛应用于路径优化,如贺风婷等[3]、郭凡等[4]、陈静静等[5]、李新利等[6]、马娜等[7],由此可以看出人工鱼群算法在路径优化方面受到热捧。考虑到无人机巡检中面临威胁和最短路径需求,本研究结合人工鱼群算法的基本原理、优势以及缺陷,提出一种改进人工鱼群算法的无人机红外巡检航点规划方法,从而在提高红外巡检航点精度的同时,减少巡检威胁。
1 人工鱼群算法基本原理
人工鱼群算法是参考鱼群聚群、觅食、追尾、随机行为而衍生的一种智能寻优算法,具有收敛速度快、操作方便、逻辑简单的特点。人工鱼群算法原理是根据人工鱼当前状态来选择行为,包括自身当前所处位置的的食物含量和食物感知分布,进而改善自己的状态[8]。通过以上行为选择,人工鱼最终会落在几个主要的局部极值点上,而求解极大值的过程则是执行鱼群算法的觅食、追尾、聚群等,然后比较各自环境中食物的含量,进而选择下一步的行为。在鱼群算法迭代过程中,若其寻优结果的最优解相较于公告牌信息有进步,则公告牌记录最优解信息并进行保存,反之则保留当前公告牌信息,通过保留每次迭代运算最优解,实现输出的最终解,即为最优解。具体执行步骤:
1)初始化鱼群规模N、个体的初始位置、步长step、拥挤度因子δ、人工鱼视野visual、重复次数try-number等参数;
2)计算鱼群中所有个体的适应度值,并赋予最优个体公告牌;
3)评价鱼群中所有个体,并对其执行鱼群聚群、觅食等行为,同时更新个体,生成新的鱼群;
4)评价新鱼群中的所有个体,若其中存在个体优于公告牌,则用该个体替代公告牌;
5)判断是否满足终止条件,若满足最优解在误差范围内或达到最大迭代次数,则结束算法,反之则返回步骤3),算法继续。
以上步骤如图1所示。
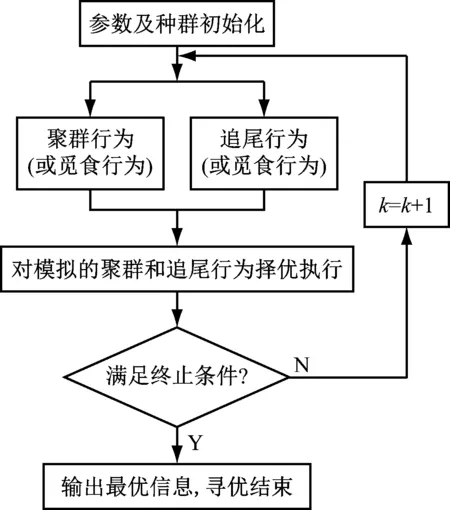
图1 人工鱼群算法实现流程图
2 人工鱼群算法改进
无人机红外巡检可认为是在一定范围内寻找最优路径,所以可将鱼群算法应用到无人机红外巡检路线规划中。研究[9-10]认为,由于鱼群算法自身后期收敛速度慢、收敛精度低等,容易导致算法陷入局部收敛,难以获得全局最优解。因此,本文对鱼群算法进行改进,通过引入自适应策略改进人工鱼视野,以提高算法的收敛速度及收敛精度,通过引入人工鱼群进化策略,保证算法子代个体质量,确保算法整体的搜索精度。
2.1 自适应策略的人工鱼视野
人工鱼视野决定鱼群的收敛速度。根据鱼群算法特性和领域学习思想,提出采用式(1)的人工鱼群视野自适应改进策略:
(1)

通过上述改进看出,人工鱼的视野随人工鱼的适应度值进行动态调整。人工鱼群在genuc代内,其自适应度值不断变化,视野也随之动态调整,通过这种动态调整,鱼群向最优解靠近,并进行精细搜索;达到genuc代后,人工鱼自适应度值维持稳定,即人工鱼视野保持不变,说明此时鱼群可能已经陷入局部收敛,应进行全局大范围的重新搜索,并将genuc代的人工鱼视野值设定为重新搜索的视野初始值。
2.2 人工鱼群进化策略
考虑到无人机红外巡检的复杂度和计算量,参考马梓元等的思路,引入人工鱼群进化策略,在该策略中,采用无性繁殖淘汰每代进化中较差的个体,保留较优的个体,确保算法整体搜索精度。具体步骤是在聚群、追尾、觅食等行为步骤后,根据每代人工鱼适应度值对人工鱼个体进行优劣排序,然后筛选、淘汰适应度值较低的人工鱼个体,最后选择适应度值较高的人工鱼个体,以替代淘汰的人工鱼个体。具体改进如图2所示。

图2 人工鱼群算法进化策略改进
通过图2的改进,可保证算法中的子代个体质量,确保整体搜索精度。
3 基于改进鱼群算法的无人机红外巡检路径规划
3.1 威胁模型构建
无人机红外巡检航线规划中,由于实际环境存在障碍物,需在避开障碍物的前提下按照规划路径进行飞行。设无人机从原点出发,在飞行中有n个半径不同的圆形障碍物区间,具体如图3所示。根据障碍区间半径、起点与目标点距离、输出的标准精度,将路径分为n-1段。采用二维符号xi、yi表示路径点,则每个航迹点的横坐标可表示为(x1,…,xn),纵坐标yi则表示航迹规划的任务。

图3 无人机红外巡检路线规划威胁模型
为与实际情况更为贴合,将无人机的飞行区域网格划分为10*8。在飞行区域内设置6个障碍物,用圆形表示,其中心点坐标和威胁半径如表1所示。

表1 障碍物位置
无人机红外巡检的起点为坐标原点(0,0),目标点坐标为(90,34)。设从原点到终点总需经过n个中间点,那么无人机飞行路径的长度则可以表示为
R={S,(x1,y1),…,(xn,yn),E}
(2)
在区域内判断路径是否可行,首先是以区域内的点为初始点,用一个数组保存障碍物的顶点信息,然后再用一组数组表示每条路径与圆相切的顶点信息。设某路径与障碍物圆相切,则cv加1,统计该路径与障碍物相切的切点总数:
(3)
3.2 航线问题描述与模型构建
无人机红外巡检路线规划需避开障碍物和规划最短路径,因此路线距离的目标函数可表示为:
(4)
由于横坐标x被平分为n等份,因此xi+1-xi为常数,且由划分步数、X坐标距离、每步坐标间横向距离决定。本研究将X坐标距离数值设为90,步数设置为12,每步坐标间的横向距离为7.5,则xi+1-xi=7.5。
3.3 基于改进人工鱼群算法的最优路径求解
根据以上的模型和改进的人工鱼群算法,用人工鱼群算法对目标函数进行求解。具体求解步骤:
(1)导入网格模型和障碍物的数据,生成无人机模拟路径规划模型;
(2)初始化人工鱼群算法的各个参数,包括步长、重复次数等;
(3)生成初始化鱼群,执行聚群、追尾和觅食行为,并利用步长自适应策略更新步长;
(4)计算人工鱼个体的适应度值,利用个体进化策略评估人工鱼的行为,并选择更为优秀的个体执行鱼群行为;
(5)计算每个人工鱼的适应度,选择适应度最高的人工鱼刷新公告板;
(6)判断是否达到算法条件,若达到则输出最优路径长度,没有则继续(4)。
4 仿真实验
4.1 实验环境及参数设置
仿真编程软件采用MATLAB 2018a,鱼数规模N=10,最大迭代数NC=300,移动步长step=0.4,δ=0.618,visual=1。
4.2 算法比较
为验证提出的改进人工鱼群算法的可行性和优越性,分别采用改进人工鱼群算法、步长自适应人工鱼群算法、传统人工鱼群算法进行50次无人机红外巡检航点规划仿真,得到图4的路线规划二维路径图和图5的三维路径规划图。

图4 3种优化算法下无人机红外巡检路径二维图

图5 不同优化算法下的无人机红外巡检路径三维图
3种优化算法下航线的平均长度和线路的平均长度方差如表2和表3。

表2 不同算法的路线平均值

表3 不同算法仿真的路线方差
由表2可知,相较于传统人工鱼群算法和步长自适应人工鱼群算法规划的无人机红外巡检航线,提出的改进人工鱼群算法规划的航线平均长度更短,说明提出的算法更优越、效率更高。
由表3可知,提出的改进人工鱼群算法的方差小于传统人工鱼群算法和步长自适应人工鱼群算法方差,说明寻优结果更接近真实值,即算法的稳定性更好、寻优效果更准确。
5 总结
本研究提出的基于改进人工鱼群算法的无人机红外巡检规划可准确避开障碍物区间,且相较于传统人工鱼群算法,具有更短、更优的规划路径,进而缩短了检修人员到达抢修地点的时间,提高了工作效率。但本研究的局限在于只是从仿真的角度改进人工鱼群算法在航点线路的优化进行研究,以上优化效果还有待进一步实际应用论证。
