无信号控制路段人车过道交互高效通行的数学模型分析
2022-08-31杨兴愿
谭 俊,杨 光,李 卫,杨兴愿
(湖南文理学院 土木建筑工程学院,湖南 常德 415000)
尽管有红绿灯与人行横道等众多交通设施及标志来保障行人和车辆过道安全,但是由于非人行横道区段占总道路长度比重大和部分人行横道无交通信号控制等原因,导致行人在过道时人车冲突的事故频发,其背后主要原因是行人和车辆驾驶员无法准确预测对方行为。
在无信号控制路段行人过道的行为主要取决于外部交通特征因素对行人过道决策选择的影响以及行人本身对安全过道的心理状态。为了解决人车交互通行的问题,已有大量学者进行了相关研究:王颖志、袁振洲等人采用人车交互事故的数据采集,从人车交互实况站在事故的视角上进行人车交互数据分类分析;连静等人在大数据的基础上建立模型,对人车交互的影响因素分析;杨城城等人针对人行横道区段人车交互展开分析,提出提高通行率的建议。
无信号控制路段在国内城市支线道路大量存在,虽然方便了行人过道,但人车交互通行的冲突事故频发,已引起交通管理部门的重视。文章通过对行人及车辆在直线区段建立数学模型进行仿真模拟分析,从而探索出不同情形下行人与车辆交互通行的最优过道方式,以达到安全高效通行的目的。
1 基本假定及参数取值
假定单辆车辆在直行车道不减速避让行人条件下交互通行,车辆和行人轨迹近似为直线运动,人车不产生冲突,为了模拟方便,车辆模型简化为矩形,道路行人模型抽象成单质点。通过调查显示在车辆行驶频繁的道路上,大多数行人选择在车辆到来前的4~6 s的间隙过街,因此对行人与车辆距离在4~6 s时间与行车速度范围内分类讨论,这样就能尽可能多覆盖道路上人车交互通行的各种情况。
在车辆与行人的相对位置建立数学关系,人车相对位置由人车在坐标系的纵向距离D和横向距离d共同确定,行人沿角度c进行过道。考虑人车之间不同的距离,再根据行人行走速度vr和车辆行驶速度vi,分不同工况进行数据模拟。根据文献和大量现实数据的调研,选取行人的过道速度为5 km/h,对应的vr=1.2 m/s,车辆速度分别取值为10 km/h、30 km/h、50 km/h,对应的v1=2.7 m/s、v2=8.3 m/s、v3=13.8 m/s。模型中道路宽度、家用小车的尺寸等参数取值见表1。
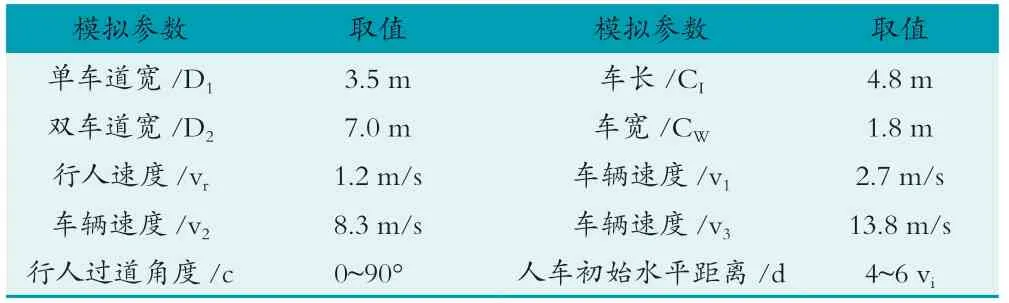
表1 模型参数取值表
2 人车交互通行轨迹数学模型建立
根据道路宽度、车辆尺寸、车辆速度、行人行走速度和人车相对位置等建立直角坐标系模型,通过构建数学方程表征人车随时间的相对变化关系,从而模拟确定人车运动轨迹。
模型中车辆在与行人在互不干扰下各自做匀速直线运动,建立模型时,考虑行人沿一定的过道角度c通行,人车交互通行安全过道存在3种情况:①当车辆速度较快、行人速度较慢而人车初始水平距离相对较近时,此时车辆能够在行人未过道之前驶离;②当车辆速较慢、行人速度较快而人车初始水平距离相对较远时,此时车辆还未能逼近行人而行人已经实现安全过道;③在车辆速度、行人速度、人车初始水平距离3个不定因素影响下,导致行人通行与车辆驶离存在碰撞风险。在前2种情况下,行人过道与车辆驶离不相冲突,不存在发现碰撞,行人只需要直线通行即可。车辆速度、行人速度、人车初始水平距离均会对通行方式造成影响,因此可以尝试通过固定车辆速度和行人速度去寻找造成不同通行结果的人车初始水平距离。模型示意图,如图1所示。
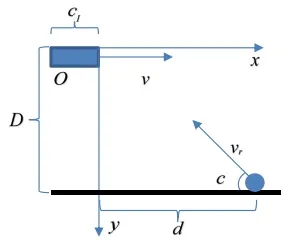
图1 人车交互通行运动模型
模型中车辆与行人均为匀速直线行驶,对于行人在模型的行动轨迹为:
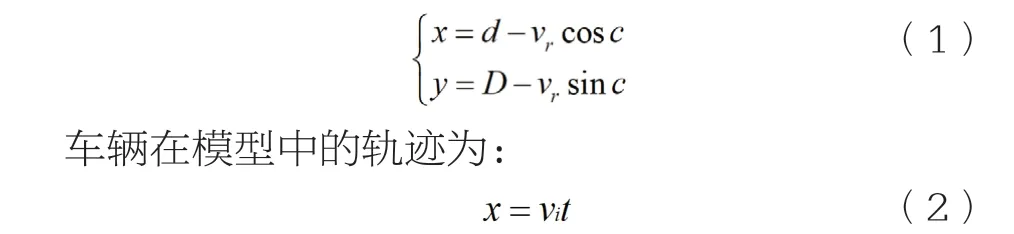
在行人决策选择过道行动后,行人和车辆同时运动,行人安全通过车道和人车水平方向相遇分别对应一个具体时间,若前者小于后者,则说明人车交互通行是安全的,安全时刻的位置状态用数学关系式进行描述为:
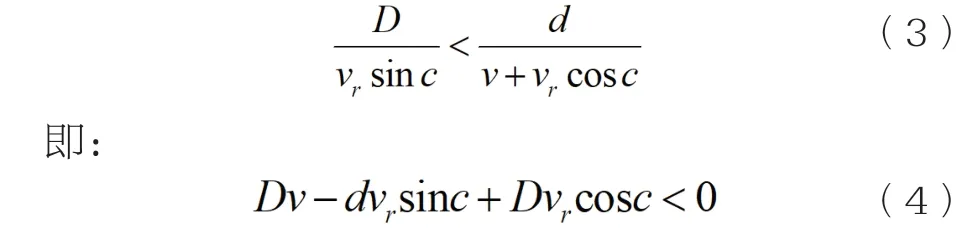
通过对模型参数的排列组合模拟各组工况下人车交互通行轨迹,其中调整行人的过道角度最为具有可行性,即,通过式(4)得到行人过道角度c的求解表达式:

其中,行人过道角度c∈(0,90°],c=90°表示行人仅直线过道,若求解得到c<90°,表示行人过道时间相对充裕,可与车辆相向而行且斜行过道。对人过道角度c在各组参数变量工况进行叠合,进而得到组任意参数变量下行人过道角度c的最优解。
构建人车交互的函数关系,并进行模拟分析,关键函数如下:

通过选择常见的车速和行人过道速度,利用计算机软件编程输入不同的人车初始水平距离即可得到与之相应的行人安全过道角度c,进而分析得到不同距离下行人的安全过道方式。
3 模型计算结果及分析
根据人车交互通行轨迹模型的数学模型,在行人与车辆距离在4~6 s时间与距离内,将表1的参数代入,分别考虑2种车道宽度和3种车辆行驶速度的组合工况。根据车速和车道宽度类别分六种情形进行模拟分析,具体工况及计算结果见表2。

表2 不同工况下人车交互通行计算结果
通过表2可知:
(1)工况1下行人经过单车道,当车辆与行人距离较近时,只要人车初始水平距离小于4 m,车辆能够在极限相遇之前驶离,而距离较远时,只要人车初始水平距离大于8 m行人能够在极限相遇前安全通过。即,人车水平距离在[4,8]m时,行人极限过道角度均不小于59°,行人安全过道角度为[0,59]°。
(2)工况2下行人经过双车道,模拟工况发现人车水平距离在[0,11]m时,行人安全过道角度均为90°,而此时行人在该工况速度较低而车能够在行人与其有碰撞风险之前驶离,表明在距离小于11 m之前,人车过道互不影响,行人以直线90°方式过道最为高效安全。
(3)工况3下行人经过单车道,初始距离较近,只要人车初始水平距离小于20 m,车能够在极限相遇前驶离,而距离大于33 m则行人能够在极限相遇前安全通过。在存在碰撞风险的区段,行人极限过道角度均不小于47°,行人安全过道角度为[0,47]°,以47°斜向通行能够在确保安全下高效过道。斜行区段为[20,33]m,不在该区段的以直线90°通行效率最高。
(4)工况4下行人经过双车道,发现极限相遇的水平距离的区段为[43,57]m,在该区段存在碰撞风险,适合斜向通行,行人极限过道角度均不小于59°,行人安全过道角度为[0,59]°,以59°斜向通行能够在确保安全下高效过道。不在该区段的,行人以直线90°通行效率最高。
(5)工况5下行人经过单车道,极限相遇的水平距离的区段为[35,58]m,在该区段存在碰撞风险,适合斜向通行,行人极限过道角度均不小于45°,行人安全过道角度为[0,45]°,以45°斜向通行能够在确保安全下高效过道。不在该区段的,行人以直线90°通行效率最高。
(6)工况6下行人经过双车道,极限相遇的水平距离的区段为[76,97]m,在该区段存在碰撞风险,适合斜向通行,行人极限过道角度均不小于57°,行人安全过道角度为[0,57]°,以57°斜向通行能够在确保安全下高效过道。不在该区段的,行人90°直线通行效率最高。
当人车初始水平距离属于斜向通行最高效区段时,在编程模拟运行结果中均能得到各个距离所对应的最佳高效通行角度。以工况3的数据集进行分析,当车辆以8.3 m/s行驶、行人以1.2 m/s行进,初始水平距离为20 m时,行人斜向通行最佳角度为56°,安全避让角度为(0,56)°;初始水平距离取32 m时,行人斜向通行最佳角度为47°,安全避让角度为(0,47)°;当初始水平距离为40 m时,最佳通行角度为90°,即行人直线通行最高效。同理可得到任意区段适用的通行方式和行人斜向过道最佳通行角度。
4 结论与展望
(1)通过建立人车交互通行数学模型,确定人车直线匀速运动下高效通行的安全通行角度计算方法,利用计算机软件编程对6组工况进行数据仿真,得到了能够确保安全的情况下行人直行的高效通行建议。验证了行人成一定夹角的过道方式也能保证安全性和高效性,为道路规划、出行方式和汽车智能自动化设计提供理论依据。
(2)对于行人过道策略的选择仍是目前自动驾驶的难点,对多人过道或在人车变速和曲线运动下的人车交互过道仍有待继续深化研究。
