基于改进滑膜控制器的机械臂力/位混合控制研究
2022-08-30梁艳芳杨永明胡云飞谭宏泽邵芸松马佳琪
梁艳芳,杨永明,胡云飞,谭宏泽,邵芸松,马佳琪
(北华航天工业学院 机电工程学院,河北 廊坊 065000)
目前,机械臂在自动生产制造过程中扮演着重要的角色。但是,大部分机械臂为位置控制[1],刘凯等[2]设计了一种自抗扰控制器,通过设计状态观测器来实时估计并补偿内外扰动,从而消除内外扰动对系统的影响,使得轨迹跟踪效果更佳。近年来,随着机器人领域的不断发展,学者们开始考虑到机械臂末端与环境进行交互的情况,如抛光、打磨或装配等[3-4],这些不仅要求机械臂位置轨迹精确跟踪,还需要控制施加垂直于给定表面的力,因此单纯的位置控制已经无法满足控制要求[5]。柳建良[6]采用反步法设计了适用于多机械臂系统模糊自适应力/位控制方案。Chaudhary等[7]提出了一种基于零空间矢量的力/位混合控制,通过设置优化性能指标来对力进行优化控制。陈洪等[8]提出了一种基于遗传算法的双臂机器人模糊力/位混合控制策略,采用遗传算法离线优化模糊控制规则对力位进行跟踪控制。周军等[9]和Peng等[10]利用阻抗控制,根据反馈的接触力通过模糊推理确定参考比例因子从而生成适应刚度变化的运动轨迹。Zhang等[11]采用模糊PID的控制方法对航空叶片自动磨削力/位置进行控制,该策略具有较高的力控和跟踪精度。李二超等[12]提出了一种面向位控机器人的力/位混合控制策略,仿真表明该策略具有较高的力控制精度和表面跟踪能力,增强了对接触环境参数变化的鲁棒性。
1 双连杆机械臂的数学模型
本文考虑简化的刚性双连杆机械臂结构如图1所示,在不考虑摩擦力等外界干扰的作用时,二自由度机械臂动力学方程可表示为:

图1 平面二自由度机械臂结构

其中,D(q)为正定的惯性矩阵;C(q,q˙)为离心力和哥氏力矩阵;G(q)为重力矩阵;q为关节位置;τ为关节驱动力矩。


1.1 工作空间位置与关节角位置转换
为了对工作空间目标轨迹进行跟踪,需要将工作空间的直角坐标转换成关节空间的关节角位置,根据图1,可得到机械臂关节角度与机械臂在工作空间的末端位置的关系[13],表示如下:


根据余弦定理可得:
从而可得:

1.2 力/位混合控制模型
力/位混合控制模型[14]如图2所示,在力和位置的控制上不存在耦合现象,为2个独立的控制方向。其控制率为:

图2 力/位混合控制原理图

其中uf为力控制;up为位置控制;S为空间选择矩阵,为2×2的对角矩阵,通过S矩阵对机械臂的力控和位控进行相应的选择。J为机械臂力域中的雅可比矩阵。
2 控制算法设计
传统滑模控制器对系统参数的摄动和外部干扰的不变性是以控制量的高频抖振换来的,一旦引入高频输入,就会激发系统的未建模特性,会影响系统的控制性能,因此必须改进传统的滑模控制器,将有害的抖振减小到一定程度,从而保证滑模控制的不变性。
本文研究的机械臂系统为典型的非线性控制系统,在实际的控制过程中,存在很多不可预见的外部干扰,这将会影响到机械臂的控制精度。传统滑模控制器的开关切换相对于被控对象的运动状态,存在时间滞后问题,这就使得系统轨迹在抵达所设计的滑模控制器切换面因误差影响而产生振动,为了消除抖振现象[15],采用一种连续的双曲正切函数替代传动滑模控制器算法中的切换函数。
定义双曲正切函数为:

式中,ε>0,其取值决定双曲正切函数的陡度。根据定理1可知:

定理1[15]:对于任意给定的实数x,存在

设qd是在关节空间中的理想轨迹,则q˙d和q˙d˙为关节空间理想的速度和加速度。

其中,Λ为正定矩阵;Fd为末端期望力;Fe为力传感器采集到末端的力。
此处仿真用弹簧滑块系统模拟机械臂末端与环境接触的力的控制,利用弹簧的变形量来计算传感器的值。关系式如下:

其中,ke为弹簧的刚度系数。
设计具有光滑双曲正切函数的滑模控制器为:

其中,K为滑模控制器参数,K>0,ε>0。
3 仿真分析
在MATLAB的simulink环境下,按照力位混合控制系统原理图搭建仿真模型,加入未知扰动的情况下,设计滑模控制器的控制增益K=[280 0;0 280],Kp=50,η=12,ε=0.1,机械臂系统模型的具体参数见表1,笛卡尔工作空间的期望轨迹如式(15)。

表1 系统模型参数

如图3—图5为传统PID控制器在受到外界干扰对机械臂力/位的跟踪的效果,仿真结果可看出PID控制对外界干扰虽有一定的削弱作用,但是跟踪效果出现了明显的超调和震荡现象,尤其在对末端力的跟踪,达不到预期的跟踪效果。
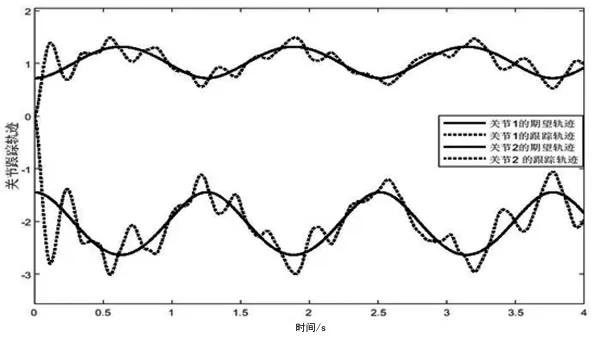
图3 PID控制器对关节位置的跟踪

图5 PID控制器对机械臂末端力的跟踪

图4 PID控制器对机械臂末端位置的跟踪
图6—图8为基于双曲正切函数的滑模控制器对受到外界干扰时的机械臂的力/位跟踪效果,从图6—图8可以看出,机械臂的关节轨迹、位置轨迹跟踪大约在0.2 s内跟踪上期望轨迹,且跟踪效果良好,没有明显震荡现象。

图6 改进滑膜控制器对机械臂末端关节的跟踪
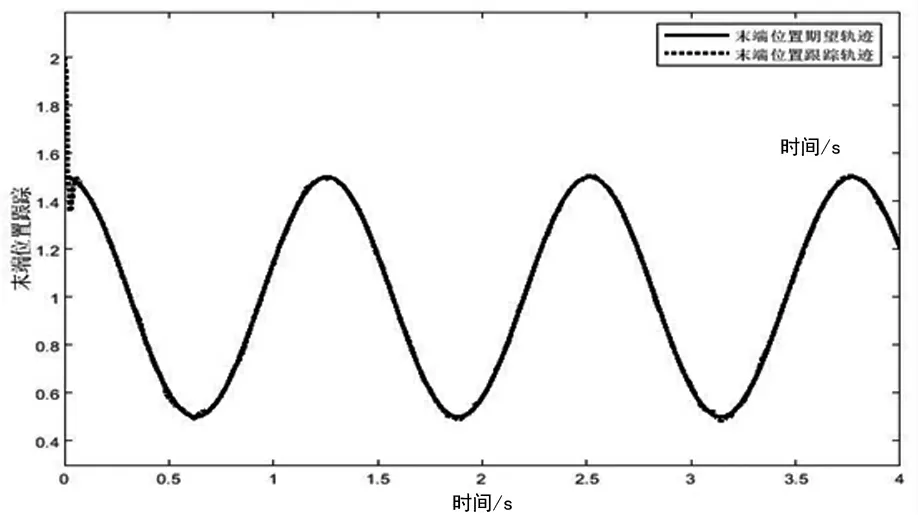
图7 改进滑膜控制器对机械臂末端位置的跟踪
图8是对机械臂在加入外界扰动下对恒力的跟踪效果,图9为对变力的跟踪效果,对机械臂末端力的控制是在传统PID的基础上加入双曲滑模控制算法,该控制精度相比于传统PID要好很多。

图8 改进滑膜控制器对机械臂末端恒力的跟踪
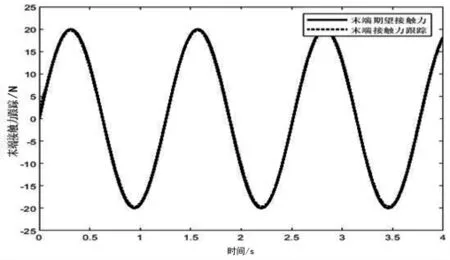
图9 改进滑膜控制器对机械臂末端变力的跟踪
4 结束语
本文针对机器人中常用的双连杆机械臂,提出了一种基于双曲正切函数滑膜控制器的力/位混合控制方案,经仿真发现,该算法与传统PID控制算法相比,具有良好的跟踪精度,即使在具有强烈干扰的情况下,控制器仍然能获得较好的控制品质,具有强鲁棒性。
