基于喜鹊的多鸟类统一运动机构设计与实验
2022-08-30张晨星宋丕伟岳泽锴刘羽婷
张晨星,宋丕伟,岳泽锴,王 亮,刘羽婷
(大连科技学院 机械工程学院,辽宁 大连 116052)
仿生扑翼飞行器是一种通过扇动翅膀飞行的机器。其中仿生昆虫飞行器和仿生蝙蝠飞行器发展较好,而仿生鸟类飞行器发展较为缓慢,该领域发展滞后的原因主要是鸟类翼型具有比其他2种飞行器的薄膜类翼型更为复杂的空间结构,并且鸟类物种繁多,运动方式及气动特性具有一定的差异性,从而该类飞行器难以形成一种比较可靠的统一运动方式,本文研究目标是建立一种具备普适性的多鸟类统一运动机构模型。
1 基于喜鹊的多鸟类统一运动机构简介
基于喜鹊的多鸟类统一运动机构简称XQ-2B,是基于生物工程学、空气动力学、机械工程学、电气工程及自动化多种学科为一体的仿生扑翼飞行器,目前,该运动机构共包含41个零部件,其主要的组成部分有:曲柄摇杆运动机构、动力传递减速系统、尾翼万向杆方向系统、内外翼仿生飞羽、无线控制及电路系统,具有喜鹊超大扑翼角度,并可通过修改构件参数、飞控系统调频及程序设计等方法,实现仿生多种鸟类的扑翼功能。如图1所示。
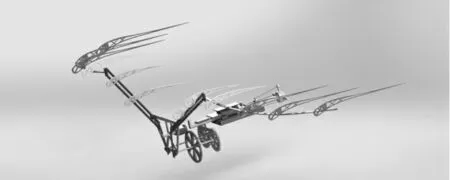
图1 XQ-2B基于喜鹊的多鸟类统一运动机构整体结构
2 生物学分析
对于多鸟类统一运动机构的建立,需要选择具有代表性的设计蓝本,蓝本需要具有普适性的飞行方式并具有较大扑翼角度,通过多日对我国脊索动物门鸟纲约1 400种鸟类系统的调查、选型和分析,最终将样本锁定在雀形目鸦科鹊属的喜鹊上。喜鹊除了南美洲、大洋洲和南极洲几乎分布于世界各大陆,并且往往生活在人类集聚地周边,非常适合蓝本数据的采集和研发工作的开展。
3 运动机构拟合
针对喜鹊仿生运动机构的建立,需要对鸟类骨骼结构进行分析,此外,团队加入了人体骨骼与鸟类骨骼进行对比分析,经过大量的资料查询后发现,鸟类相比于人类骨骼,肱骨较短,尺骨和指骨下侧附有次级和初级飞羽,如图2所示。可以将掌骨、指骨和初级飞羽拟合为一个构件,并结合生物学、仿生机械学对运动机构进行设计,最终运动机构运动简图如图3所示。

图2 鸟类骨骼结构图

图3 机构运动简图
4 机械运动机构部分
4.1 曲柄摇杆机构
常规仿生扑翼机构属于一种鸟类对应一种或多种扑翼机构,一直没有一种较为统一的模型供学术参考,从而造成该领域内结构种类繁杂,可参考性不强。因此,通过对仿生扑翼机构进行创新设计,依靠曲柄摇杆机构,利用单级齿轮机构来实现减速及动力传输,通过地面控制电控,调节电池输入电机的电压,进行扑翼速度的调节。电机输出动力,通过单级齿轮减速器进行减速,并将动力传输至曲柄摇杆机构,从而实现扑翼动作。如图4所示。

图4 曲柄摇杆机构
4.2 动力及减速器系统
由于在自然界中鸟类飞行的扑翼速度相较于步进电机的转速较低,为此在设计的过程中为电机添加了一级齿轮减速器和双翼齿轮啮合动力传递装置,可以进行传动比为3的减速运动,整体齿轮系统采用镂空设计,大大减少了系统的重量,双翼动力齿轮的啮合设计使得在进行扭矩传递的过程中同时保证了飞行器双翼振频一致。如图5所示。

图5 动力及减速器系统
4.3 尾翼万向杆方向系统
尾翼万向杆方向系统共嵌有2个舵机,3个万向杆,由无线控制系统控制,可实现左右、上下以及配合联动,可以灵活地实现多方向活动,仿生鸟类各种情况下的尾翼动作。

图6 尾翼万向杆方向系统
4.4 内外翼仿生飞羽
内外翼仿生飞羽是根据鸟类初级以及次级飞羽进行剖面拟合,具有在蓝本基础上优化后的、前缘、后缘等各项参数,结合飞行器设计基础所设计的一种凹凸翼型,整体材质采用巴尔沙木,既有较轻的质量,也有较高的强度,仿生飞羽整体采用镂空结构,尤其是外翼部分的设计,与飞行器翼型设计略有不同,这种设计可以增加外翼边缘的柔韧性,从而使其性能更接近于真实鸟类。如图7所示。

图7 内外翼仿生飞羽
4.5 中继通信模型的建立
本小组基于无人机中继通信的实际应用环境以及双向中继信道模型(TWRC),对仿生扑翼飞行器中继通信模型进行设计,可将地面终端、中继无人机及仿生扑翼飞行器构成的无线中继链路建立为非对称双向中继信道模型。如图8所示。由图8可知,节点A为地面终端,节点R为中继无人机,节点B为仿生扑翼飞行器。地面终端通过中继无人机向仿生扑翼飞行器发送指令信息,仿生扑翼飞行器通过中继无人机向地面终端反馈信息,地面终端和仿生扑翼飞行器之间没有直接链路。

图8 中继通信模型
5 实验分析及可行性验证
5.1 虚拟样机运动分析实验
三维数字化模型建成之后,将模型导入inspire中,为了规范和限制各构件之间的相对运动,对部分部件添加一些约束,设置刚体组并建立连接器,确定各铰接部分连接关系,最终为运动机构添加转动电机及跟踪器,设置控制类型,确立扭矩及转动速度(60 rpm)为运动分析做好准备。
驱动部分添加完毕后,便可进一步对样机进行运动分析,提取各零件、刚体组、铰接和转动电机的位移、角速度、速度、角加速度、加速度、力和扭矩等各项参数,并对转动电机的要求扭矩、角度、速度(期望和实际)、角加速度、角急动度、功率、铰接部分的力和扭矩进行进一步的分析,为后期材料的选型、设计的优化和实物的制作打下基础。
部分结构运动实验数据采集可视化分析结构如图9—图11所示。
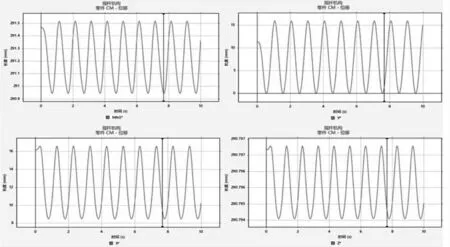
图9 位移运动实验数据采集

图11 加速度运动实验数据采集
5.2 质量分析验证
通过3D打印技术对XQ-2B轻量化虚拟样机模型进行完全体实物制作,模型各零件进行组装测试,并通过JJ124BC分析天平对模型运动机构整体质量进行抗压实验和质量数据采集,模型总质量128.984 9 g(不包含仿生飞羽部分),远低于国际公认的微型扑翼飞行器300 g的最高飞行质量,从而证明该结构设计是非常可行的。如图12所示并且,在进一步验证整体的结构,完全固定整体结构设计参数后,结构可采用碳纤维材料,还可以进一步减轻飞行器的质量。

图12 JJ124BC质量分析实验
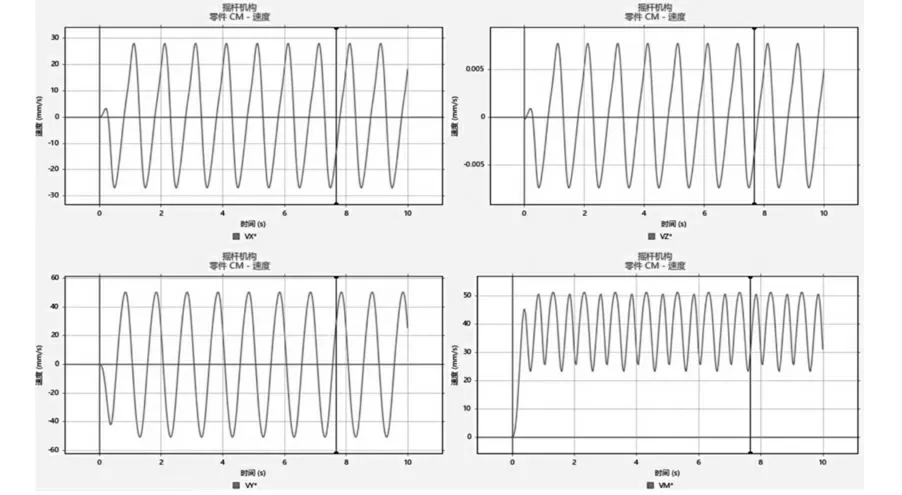
图10 速度运动实验数据采集
6 结束语
国内对仿生扑翼飞行器的研究现今虽然已经取得的一些成果,但由于鸟类物种多样,机械结构与控制系统种类繁杂、难以形成一套具有完整性、普适性和多样化的设计方法。本运动机构的目标以喜鹊为蓝本,设计及验证一种能够仿生多种鸟类扑翼动作的新型飞行器的核心运动机构,并在此基础上形成由提取蓝本参数、代入运算进行设计、虚拟样机仿真和扑翼飞行器制造的完整设计流程,从而为我国的仿生扑翼飞行设计提供参考。
