北斗定位和ZigBee通信的运动轨迹监测方法
2022-08-30陈昌鑫
陈昌鑫,赵 亮,谢 冰
(1.中北大学 省部共建动态测试技术国家重点实验室,太原 030051;2.中北大学 电气与控制工程学院,太原 030051;3.河南警察学院 网络安全系,郑州450046)
随着工业自动化、智能化的不断发展,自动化装置的研究不断提高了效率,给生产生活带来了便利。在一些火灾救援现场,传统人工抛射灭火弹、救生索及消防器材的方法具有随机性,往往依靠人的经验,因人而异。近年来,自动化发射装置逐渐取代了传统人工发射的方法,灭火炮等自动化发射装置可以根据建模计算来实现物体的定点投射[1],极大提高了救援效率,为了验证和优化自动化发射装置建模的准确性和可靠性,需要对发射出的物体进行轨迹监测,对实际轨迹与理论值进行对照实验。
目前,运动体轨迹监测的方法已有大量研究,曾维棋[2]研究了基于FMCW雷达的高精度测距定位算法,通过测量回波信号和发射信号的频差来实现测距,并通过算法改进提高了定位精度。王宁等[3]研究了基于毫米波感知的小型无源物体定位追踪,利用毫米波敏感性强的特点感知物体移动,通过反射信号的频谱变化实现定位追踪。魏大为[4]研究了基于CCD传感器视觉图像定位方法,通过对图像的灰度形态算法、边缘监测算法等分析,实现对平衡环位置的定位监测。陈顺超[5]研究了一种基于ZigBee网络的运动物体定位追踪,研究了基于信号强度值测距的方法及模型的建立。杨春晖等[6]研究了基于超声波目标定位与追踪系统在机器人中的应用,通过超声波测距原理和三边测量法建立了超声波定位系统。田会[7]研究了基于光幕阵列的变速曲线弹道弹丸飞行参数测量方法,依据匀速直线运动弹丸穿过不同光幕的时间建立直线运动方程,解算出弹丸空间的着靶坐标和飞行速度矢量。
本文针对运动物体的运动轨迹监测问题,研究一种基于北斗定位和ZigBee的运动物体位置监测方法,实现运动物体轨迹的实时监测与绘制。
1 系统结构组成与工作流程
北斗定位和ZigBee的运动物体位置监测系统主要包含北斗定位信号发送模块、上位机远程监测模块2部分。北斗定位信号发送模块包括北斗信号接收模块、主控芯片和ZigBee模块A,北斗信号接收模块通过引出天线用于接收北斗卫星信号,北斗信号接收模块通过串口与主控芯片连接,主控芯片通过另一串口与ZigBee模块A连接,主控芯片采用STM32F103系列单片机,该单片机具有多个串口。上位机远程监测模块包括ZigBee模块B和上位机,ZigBee模块B与Zig-Bee模块A通过无线连接,ZigBee模块B和上位机通过串口连接,总体结构如图1所示。

图1 总体结构设计图
主要工作流程为北斗定位模块接收北斗卫星的数据,后将信号由串口发送到主控芯片进行存储与解算处理,将处理后的信息通过ZigBee无线模块A,发送到ZigBee无线模块B,再由ZigBee无线模块B发送到上位机软件进行处理与显示,达到监测的目的。系统整体工作流程如图2所示。
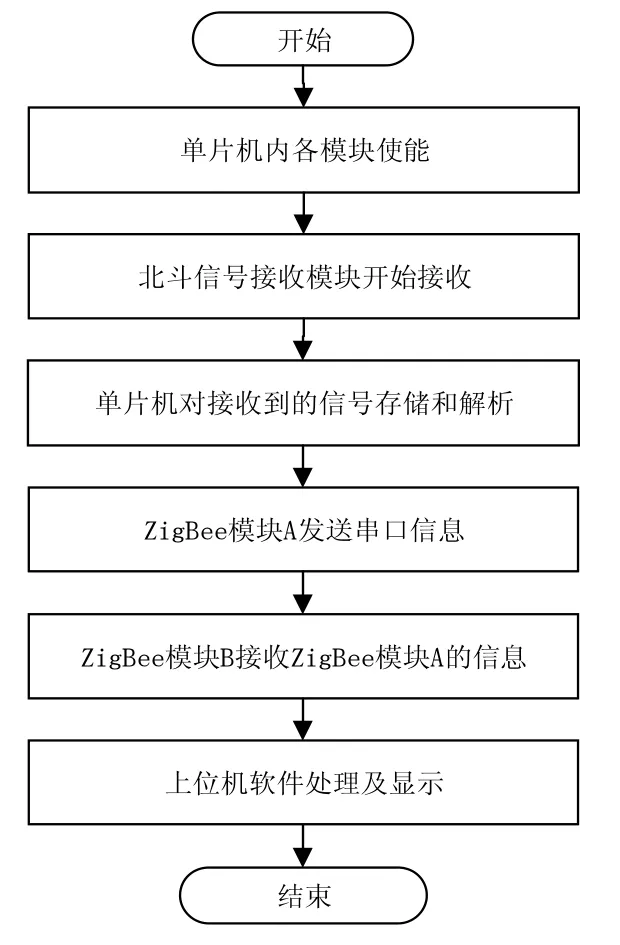
图2 系统整体工作流程图
2 硬件结构设计
2.1 北斗信号接收模块
北斗导航系统是我国自主研发的卫星系统,可以实现短报文通信、精密授时和快速定位等服务[8]。为了实现运动轨迹的实时监测与绘制,对北斗信号接收模块的刷新率提出了较高要求,监测系统要求采用20 Hz刷新率的北斗信号接收模块,每隔0.05 s接收一次定位数据和时间数据,可以将接收到的信息传输到主控芯片Flash进行信号存储,同时用另一串口发送到Zig-Bee模块。
北斗信号接收模块采用NMEA0183协议接收信息,NMEA0183协议采用ASCII码来传递定位信息、地面速度、卫星信息和当前时间信息等多种信息[9]。北斗信号接收模块选用S1216F8-BD,S1216F8-BD是最先进的全球导航系统接收器,该芯片模块包含V8内部定位引擎,具有高灵敏度、低功耗等特点。
北斗信号接收模块通过串口与单片机进行连接,其连接电路如图3所示,其中除串口通信外,可以根据需求选择性使用PPS脉冲输出脚。
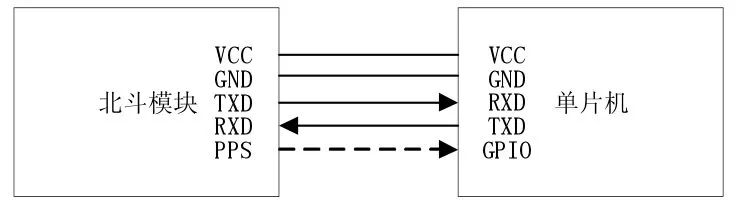
图3 北斗信号接收模块与单片机硬件连接图
北斗信号接收模块通过单片机软件程序解析其接收到的NMEA0183数据信息,也可以通过SkyTraq改变模块的串口波特率、输出频率及PPS输出脉冲。北斗信号接收模块输出频率的配置软件流程如图4所示。

图4 北斗信号接收模块输出频率的配置软件流程图
2.2 ZigBee远程传输模块
ZigBee是一种低速率、低成本、近距离的无线网络传输技术[10],ZigBee一般可以实现节点间400 m及以上距离的传输[11]。ZigBee远程传输模块的设计既可以采用点对点的远程无线传输方式,也可以采用广播的无线传输模式,采用的主要芯片为CC2530的集成模块。通过设置相同的波特率和频道,设置主从机模式,实现远距离无线传输。
单片机通过串口与ZigBee模块进行通信,通过CC2530芯片集成模块实现串口信息的透传,单片机串口工作的主要软件流程图如图5所示。
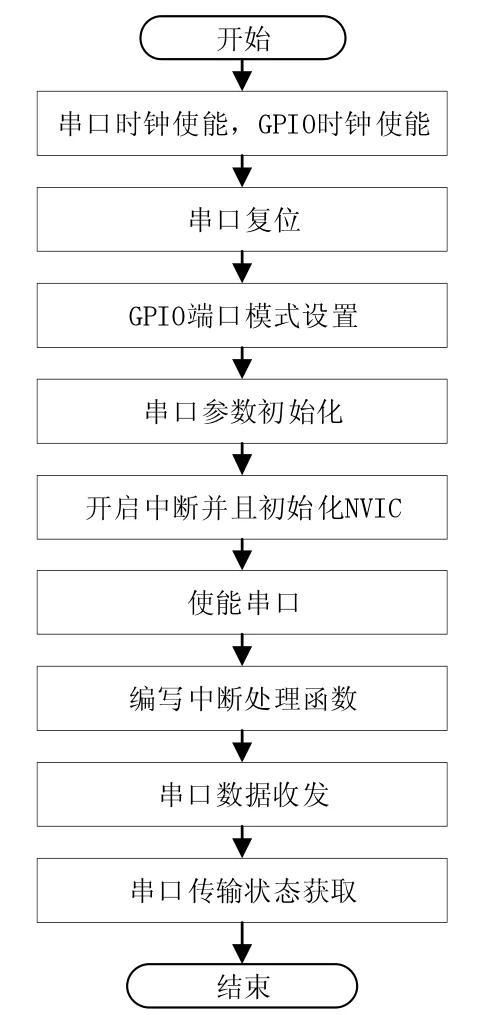
图5 单片机串口工作的主要软件流程图
2.3 电源供电电路设计
单片机、北斗信号接收模块、ZigBee模块的主要工作电压均为3.3 V,通过采用稳压模块集成滤波电路实现供电电路的稳定工作。供电电路结构图如图6所示。
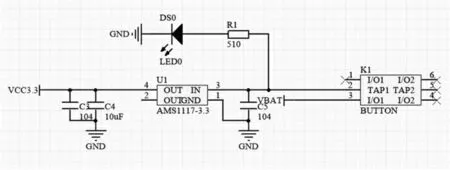
图6 供电电路结构图
3 实验测试验证
搭建符合电路图的实物模型,单片机与ZigBee模块通过串口1连接,单片机与北斗信号接收模块通过串口3连接,将串口3接收到的信号进行处理可以通过串口1进行转发,实物模型图如图7所示,北斗信号接收模块连接天线接收信号,该电路连接可以实现稳定正常工作,测试时可以通过LCD进行显示实时定位信息。

图7 实物模型图
使用无人机装载该模型进行运动,实现物体运动定位测试,实时接收报文如图8所示,通过分析报文实时时间,可以看出每隔0.05 s可以接收一次报文信息,$GNGGA为北斗定位信息。

图8 20 Hz物体运动报文信息图
通过上位机软件,可以得到实时定位信息,如图9所示,其中时间为UTC时间。

图9 实时定位信息图
上位机软件对运动过的定位进行记录,绘制出轨迹散点图,3次环形车道轨迹散点图如图10所示,通过对轨迹点拟合曲线,实现轨迹的绘制。

图10 实测运动轨迹散点图
4 结束语
通过设计基于北斗定位和ZigBee的运动物体位置监测系统,20 Hz刷新率的实时定位信号接收和ZigBee信号传输,实现了物体位置的定位及运动物体轨迹监测,为运动物体运动轨迹建模仿真提供了一种实验验证方法。该定位方法一般应用于室外环境,具有低功耗、低成本等特点,依靠北斗系统的高性能实现精准定位,应用于运动物体的轨迹校准,对运动物体的控制和监测具有良好的应用前景。
