一种海面虚假航迹的分析与抑制
2022-08-30代霞,方睿
代 霞,方 睿
(1.中国电子科技集团公司第三十八研究所,安徽 合肥 230088;2.孔径阵列与空间探测安徽省重点实验室,安徽 合肥 230088)
0 引 言
海面态势感知是海战场综合信息系统的重要基础和组成部分,其面临的挑战以及未来的发展趋势需要海面探测设备不断地提升能力。由于机载雷达具有平台高度和机动优势,能够灵活实现对非固定海面的大范围侦察、监视,经过几十年的发展,目前机载海面监视雷达已经成为各国海军的必备侦察手段,在各类军事/非军事任务中得到广泛应用。
海面侦察的物理环境和电磁环境都比较复杂,杂波、干扰、雷达体制等一系列因素都对机载海面监视雷达的目标有效跟踪提出了严峻挑战。副瓣干扰是一种典型的干扰情况,点源干扰或海面地物强反射目标回波从雷达副瓣进入后,会影响甚至淹没雷达主瓣接收的目标回波信号。
通常雷达会在信号处理域采用副瓣对消、副瓣匿影等方式进行抗干扰,但当天线性能或处理效果不佳时,进入副瓣的干扰信号难以得到有效抑制和过滤,往往被误检测为目标。由于平台运动,雷达和副瓣干扰信号源之间的相互位置不断发生变化,从而产生这种由副瓣“折叠”到主瓣目标的运动假象,形成虚假航迹。
因此,机载监视雷达目标跟踪处理需要能够有效识别这些虚假航迹,并进行抑制和剔除,提升系统的抗干扰能力。
1 副瓣干扰引起的海面虚假航迹
图1是一次机载雷达仿真实验过程中的部分结果场景,其中连续点表示对目标跟踪形成的航迹,航迹最新的位置点附着文字标牌,显示航迹的批号和速度。
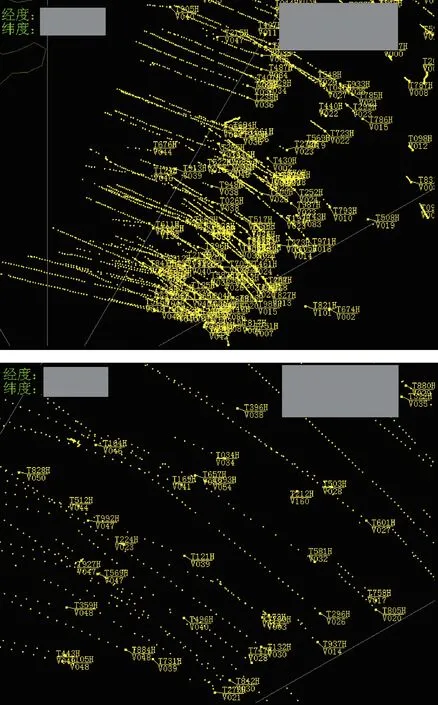
图1 部分实验结果场景
从图中可以看出,实验过程出现了大量虚假航迹,对真实目标的跟踪效果产生了干扰。虚假航迹不仅分布密集,而且方向和速度都非常稳定,呈匀速直线运动状态。此外,虚假航迹还表现出分组的特征,每一组航迹方向几乎一致,直观上看类似几组平行线。
经排查分析,虚假航迹定位为副瓣干扰和载机运动共同作用产生的结果。一方面当副瓣内的干扰或强反射被误检测到后,会“折叠”到对应主瓣产生虚警;另一方面,随着载机本身的运动,主、副瓣相对反射源的角度和位置关系也在发生变化,导致每帧探测的虚警位置也不相同,从而产生运动假象,形成虚假航迹。
2 特征分析
2.1 建模分析
为提取特征给后续识别和抑制提供参考,进一步对虚假航迹进行定量分析,根据成因建立相应模型。
如图 2所示,选择载机和副瓣干扰所在平面建立惯性直角坐标系,其中表示载机,表示副瓣干扰(点源干扰或海面地物强反射目标等,假定固定,位置不随时间发生变化)。干扰从副瓣“折叠”到主瓣引起虚警的过程可以抽象为围绕,从副瓣旋转角度到主瓣,产生虚假目标检测点′。
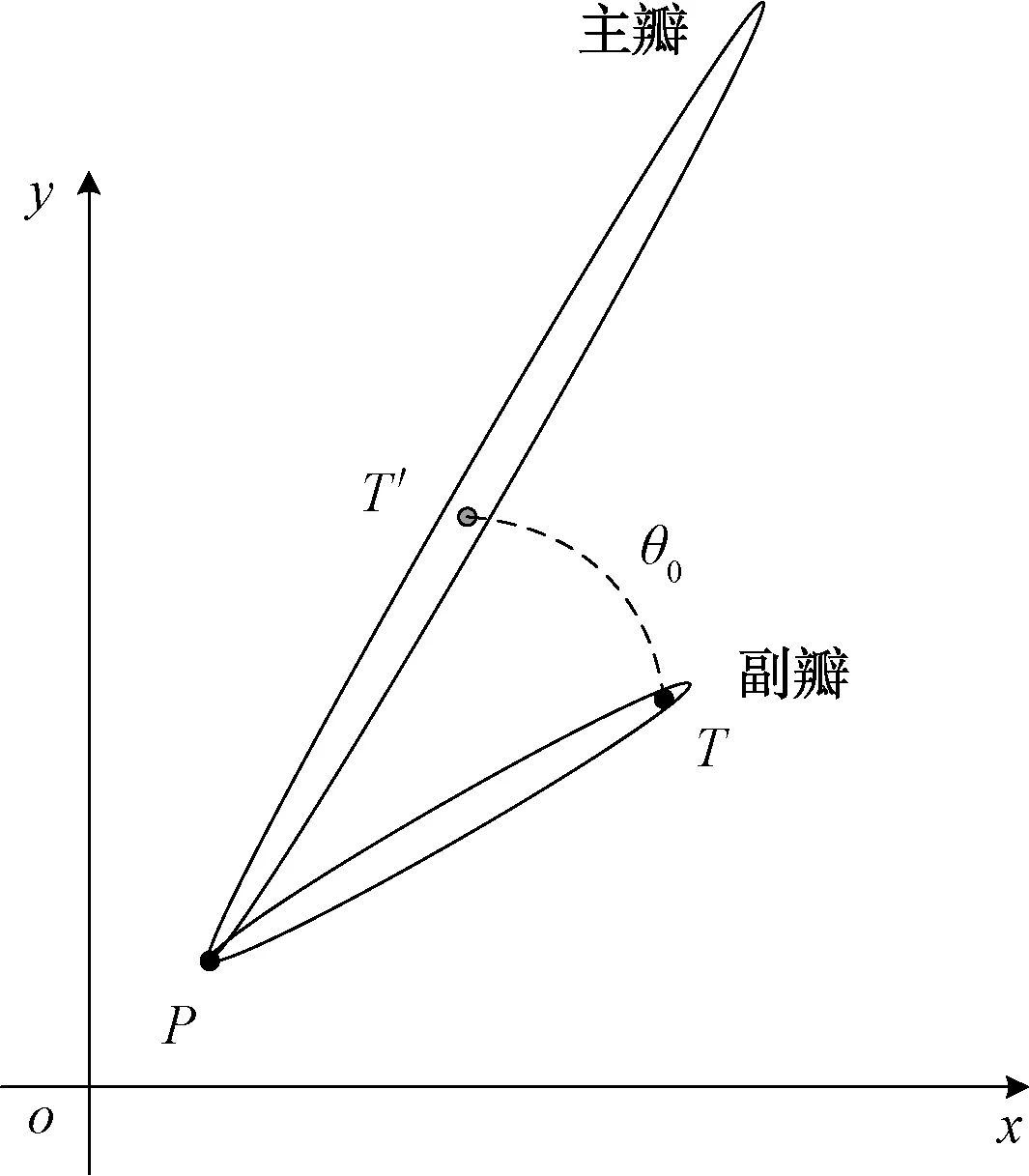
图2 虚假航迹成因模型
假设各点坐标为((),())、(,)、′(′(),′()),其中表示时间。根据旋转公式可得:
′()=(-())·cos-
(-())·sin+()
(1)
′()=(-())·sin+
(-())·cos+()
(2)
令上述两式对时间求导,可得:

(3)

(4)
对上述两式分别平方并求和,可得:

(5)
即:
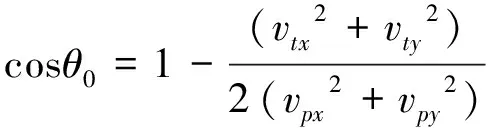
(6)
因此,对于虚假航迹,可以先通过式(6),根据航迹速度和载机速度计算,进一步代入式(3)、式(4)即可预测其运动速度与方向(通过2个速度分量的比值)。
2.2 实测数据分析
为验证上述模型的合理性,采用图1对应的原始数据进行分析。
分别人工选择4条虚假航迹和真实航迹作为样本,对于航迹的每一帧数据,首先通过式(6)和(3)、(4)计算得到模型预测的虚假航迹方向速度分量_,然后计算其与真实速度分量的相对误差Δ,计算公式为:
Δ=(-_)
(7)
分析结果如图 3所示,可以看出:虚假航迹的相对误差明显较小,绝大部分都在±30%以内,而且比较稳定,几乎不随时间改变,与模型符合;反之,真实航迹的相对误差波动明显,呈现出随机性,且数值范围较大。
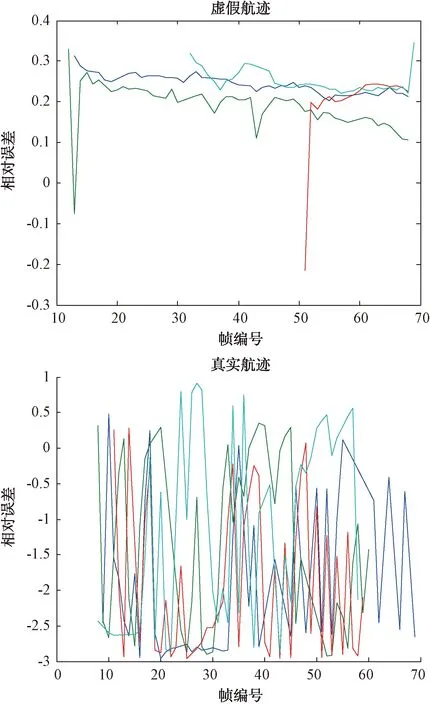
图3 原始数据分析结果
理论上,虚假航迹速度分量的相对误差应为0,但实际工作中由于波束形态、测量误差、随机噪声等因素的存在,通常是难以达到的。
3 识别和抑制方法
3.1 方法流程
基于前文的特征分析结果,由副瓣干扰引起的虚假航迹识别和抑制方法流程设计如下:
(1) 获取航迹状态数据
取一条航迹个最近更新点的状态数据,的取值范围一般为[2,5],数据包括载机和航迹分别在惯性直角坐标系下、2个方向上的运动速度分量,具体可通过惯导信息、目标地速、运动方向等计算得到。
之所以取多个点,是为了通过信息累积消除偶然因素的影响,防止因误差或噪声引起误判。
(2) 计算相对误差Δ
按照2.2节的过程计算每个更新点对应的相对误差,得到一组共计个Δ。
需要注意的是,由于航迹每次更新只增加一个点,重新计算一次即可,另外-1个相对误差值可以保存沿用前面的计算结果。
(3) 识别抑制虚假航迹
基于每组Δ,综合对每条航迹是否虚假进行识别。
首先,设置相对误差的合理值域[-,](为范围调节参数,恒正,根据实测数据分析经验一般可取0.5),判断若个Δ是否均处于该范围内;
其次,设和分别表示个Δ的方差和均值,判断<0.1是否成立。
如果上述2个条件都满足,即该航迹多个更新点的速度分量相对误差既靠近0又稳定一致,与模型特性符合,则判断其为虚假航迹,进行删除处理;否则,航迹保留,继续观察。
从上述流程可以看出,该方法对于每条航迹而言,只需要额外存储几个计算过程值,在每帧航迹更新时进行一次简单计算即可,时间和空间资源开销都非常小,不会对目标跟踪正常的处理流程产生影响。
3.2 方法效果
分别在采用和不采用本文方法的情况下,回放同一段原始数据,保持其他目标跟踪处理流程不变,进行对比实验。不失一般性,实验选取了若干不同区域。
如图4所示,其中每组子图对应同一个区域,左侧为原始处理效果,右侧为采用方法后的对比处理效果。
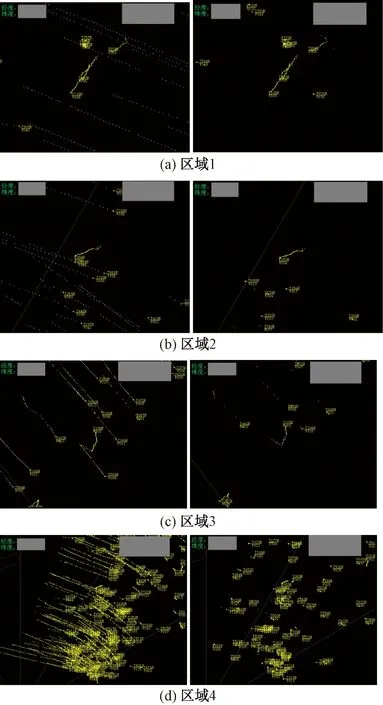
图4 对比实验结果
可以看出,采用本文方法后,虚假航迹普遍得到了有效识别和抑制,抗干扰效果明显。此外,原本的真实航迹依然可以正常处理,跟踪效果和实时性得以保证。
4 结束语
本文在分析副瓣干扰引起虚假航迹过程的基础上,建立了相关的成因模型,对虚假航迹的特征进行了定量分析,进一步提出一种识别和抑制此类虚假航迹的方法。该方法首先假设待处理的航迹为虚假航迹,根据航迹的状态数据计算若干最近更新点的预测速度分量,然后与实际速度分量对比得到1组相对误差,通过值域范围和一致性2个维度对其进行检验,判定虚假航迹的假设通过与否,并分别进行相应处理。实测数据的对比实验结果表明,该方法抑制虚假航迹的效果明显,且不会对正常航迹产生影响,能够提升系统的抗干扰能力。
后续可以将干扰源的时变信息、雷达波束形态等因素纳入研究范畴,进一步提高理论模型与实际情况的符合程度,以便对虚假航迹的特性进行更加精确的分析与预测。