轮腿式六足智能消防机器人设计研究
2022-08-28苏毅
苏毅
(甘肃建筑职业技术学院,甘肃 兰州 730050)
0 引 言
随着科学技术的快速发展,各式各样的可移动机器人纷纷涌现,用以协助人类不同类型的工作,与我们的生活形成密不可分的关系。在人工智能技术的广泛应用下,智能机器人发展迅速,广泛应用于各个领域,按照其功能类型可以分为消防机器人、救援机器人、拆除机器人以及爆破机器人等。
智能化消防机器人融合了多种现代技术,将机械理论、计算机理论、人工智能以及控制技术等应用于消防机器人中,使其具备识别和判断能力,能够精准把控灾情发展情况。消防机器人能够在火灾发生后第一时间进入火灾现场实施救援,从而缓解消防人员紧缺的问题,并且能够在快速获取火灾现场情况的前提下深入现场,保证后续消防工作者的生命安全。
现阶段使用较多的是轮式和履带式消防机器人,其能够在较为平坦的地面上快速收集场景内信息,但由于火灾现场的环境时时处于动态变化之中,这就增加了消防机器人的移动距离和所需时间,采用上述两类机器人难以有效收集和整理相关信息。有鉴于此,本文研究轮腿式六足智能消防机器人的设计方法,为消防机器人的移动轨迹进行合理规划。
1 轮腿式六足智能消防机器人设计方法
1.1 设置轮腿式六足机器人各腿受力参数
根据机器人的构造一般可以分为轮式机器人、履带式机器人、足式机器人,足式机器人拥有较强的地形适应能力,能够较差的环境下保持良好的机动性能,即使是在有阻碍物的地面上或是恶劣的自然环境中,其整体性能也会优于轮式机器人或履带式机器人,拥有更强的越障能力。
将足式结构融入轮式机器人,需要对其腿部的不同位置进行受力点分析和设置,以此完成行进路径的合理规划,使其在火灾发生时能够迅速到达指定火点位置,提升消防机器人的综合性能。对轮腿式六足智能机器人的参数进行设定,具体数值如表1所示。
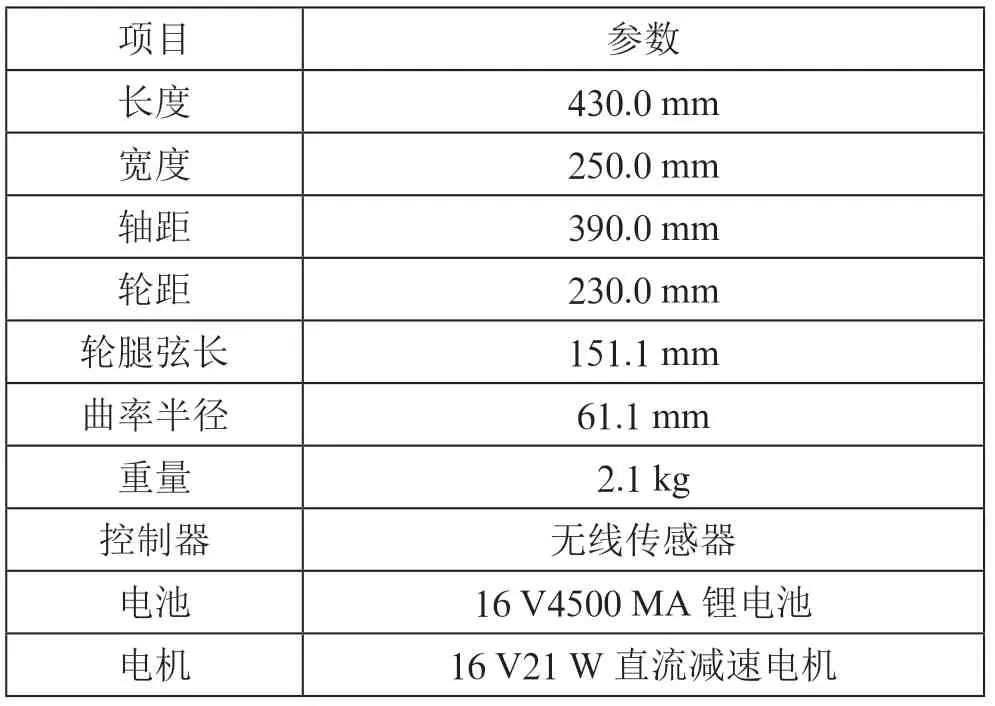
表1 轮腿式六足智能机器人参数
根据表中内容,此次在无线传感器技术的基础上,对智能消防机器人的行进轨迹进行定位设计。在其支撑腿末端离开地面时,足端需要一个摆动范围,根据正向运动学理论,联系各个关节的情况,定义不同情况下各个腿受力后足端的摆动变换范围,按照运动学的行进轨迹进行分析,结构设计如图1所示。
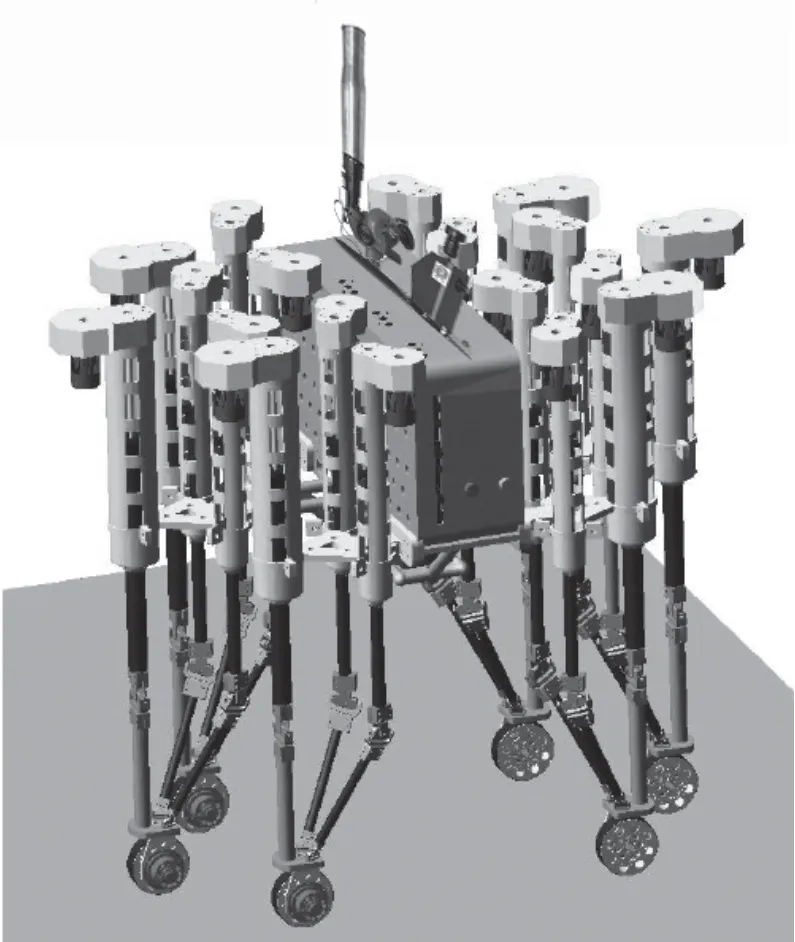
图1 轮腿式六足智能机器人模拟图
1.2 正向运动学定义消防机器人摆腿范围
将消防机器人的单腿和关节与基体连接处,设定为惯性坐标系用来表示,该坐标系的原点为,足端对应的坐标系为工具坐标系用来表示,坐标系的原点为。
分别对机器人的跟关节、髋关节以及膝关节进行标记,在其运动过程中会产生一定的角度位置,表示为、和。
按照正向运动学的理论进行分析,在机器人的对应单腿完全伸展时,表示为位置的初始形态,可以将惯性坐标系和工具坐标系进行转换。
此时各运动角度取值分别为=0、=0、=0,表达式为:
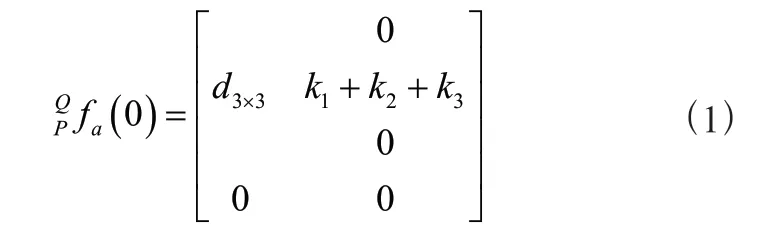
其中,轮腿式六足智能消防机器人的总腿用来表示,机器人的本体位置用来f表示,各个关节处的运动变量在足端惯性坐标系下所处的位置,用f来表示。
基于右手定义规则进行各关节距离设定,跟关节到髋关节的距离用来表示,跟关节到大腿的距离用来表示,跟关节到小腿的距离用来表示。对各个驱动关节的旋转运动量进行设定,分别为:

其中:关节的旋转量用来表示。取坐标轴上的对应点位,按照坐标位置进行转换,表达式为:
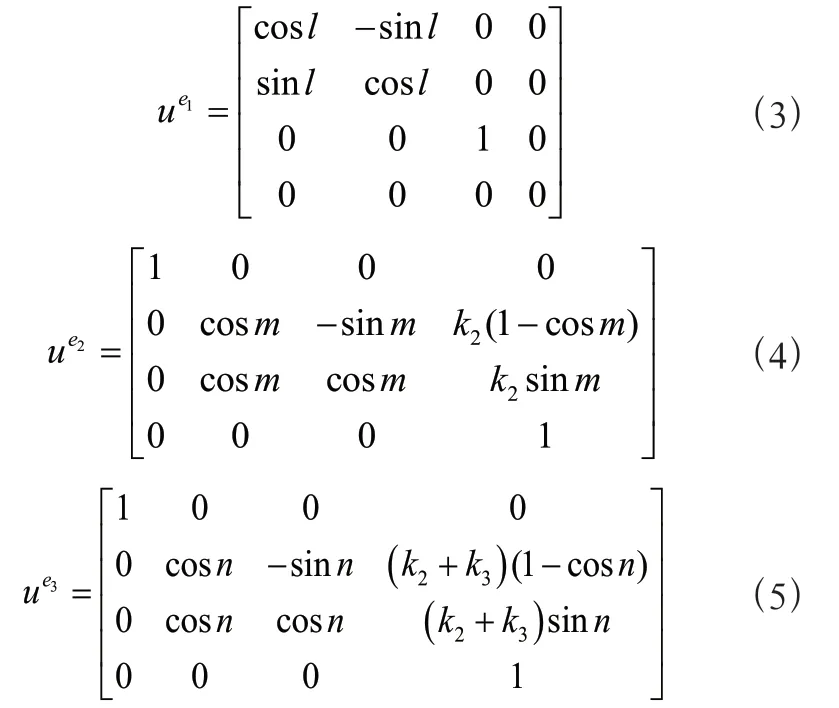
将对应坐标系下跟关节、髋关节、膝关节产生的旋转量,转化完成的指数关系数值分别用u、u、u来表示。对不同情况下的各个腿部关节进行坐标转化,以此确定足部末端的运动轨迹范围。
在设置轮腿式六足机器人各腿受力点的前提下,根据正向运动学理论定义消防机器人的运动摆腿范围,完成轮腿式六足智能消防机器人的设计。
2 实验测试与分析
为验证所设计机器人的实际应用效果,采用实验测试的方法进行论证。选择两组传统的机器人进行对比,分别为轮式消防机器人和履带式消防机器人。
2.1 选择实验测试环境
本文设计的六足式智能消防机器人,主要目的是它在路面崎岖不平的场景中依然能够实现良好的路径规划和选择性能。对其综合情况进行测试,以不同垂直高度的楼梯高度作为变量,在MATLAB 测试平台中拟建实验测试环境。
此次选择楼梯作为实验测试环境,对不同类型的智能消防机器人进行性能测试。本次测试主要分为两个阶段:
(1)测试智能消防机器人的平稳性能,即检测机器人在爬楼梯的过程中,其重心轨迹是否能保持连贯性,验证三组机器人行进过程中的稳定性能。
(2)在机器人攀爬楼梯的整个过程中设定火灾情况,在楼梯中设置障碍物,以此判断智能消防机器人是否可以改变行进轨迹,以较快的速度到达终点。
2.2 智能消防机器人重心轨迹变化对比
对拟定的测试项目进行分类,分别模拟常规场景和火灾有障碍的场景,测试不同类型智能消防机器人的行进轨迹是否有偏移重心的情况,以及测试在出现路障时机器人是否能改变行进轨迹,迅速到达指定位置进行救援。
将三组智能消防机器人依次连接到测试平台中,首先按照没有路障的情况完成行进轨迹,设置拟建的楼梯起始点到终点的距离,水平距离为4 800 mm,垂直高度为1 600 mm。楼梯共包含8 组台阶,对其距离和高度进行平均分配,在指定的起始点和终点连线上进行重心轨迹测试,具体情况如图2所示。
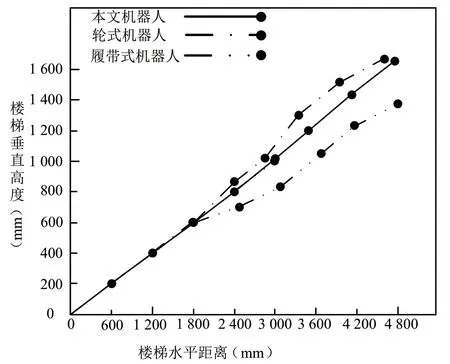
图2 不同消防机器人重心轨迹变化对比结果
从图2中可以看出,在此次重心轨迹测试过程中,将三组机器人的初始转速均设置为π,其与楼梯表面产生的静摩擦系数为0.6。两组常规模式下的消防机器人,在攀爬到楼梯中间位置时发生了一段时间的重心停顿现象,且重心轨迹的变化幅度较大,说明上述两组机器人已经偏离了既定的轨迹线路,其稳定性较差。
从本文设计的机器人来看,其重心轨迹与楼梯的走向相一致,具有良好的攀爬性能,且可以在较为平稳的状态下完成轨迹行进。综合实验结果可知,此次设计的轮腿式六足智能消防机器人,在攀爬楼梯的过程中能够保持重心轨迹的连贯性,具有实际应用效果。
2.3 智能消防机器人路径规划时间对比
为进一步验证本文机器人的性能,在上述测试完毕后,模拟小型火灾场景,即在楼梯终点处模拟火苗燃烧场景,且在火苗燃烧过程中会下落不同大小的障碍物。机器人在遇见火灾障碍物时,若能瞬时重新拟定其行进轨迹,即可以保证在较短时间内到达火灾发生地点,不会影响救援工作的开展。设置轨迹行进时间在0.15 s 以内均符合救援标准,将三组机器人放置在该环境中,进行轨迹规划的时间测试,具体情况如表2所示。

表2 不同类型智能消防机器人路径规划时间(s)
根据表中的内容,本文设计的轮腿式六足智能消防机器人,在针对障碍物进行轨迹重建时,对路径的规划时间平均为0.04 s,符合救援工作标准,且远低于标准设定极值,而两组常规化机器人的平均轨迹重建时间分别为0.21 s 和0.36 s,均不能满足救援工作标准。
实验结果表明,单纯的轮式机器人和履带式机器人,在崎岖路况下不能快速地完成轨迹规划,影响整体救援速度。而本文设计的轮腿式六足机器人,既保留了原有轮式机器人的性能,又提升了其爬坡稳定性,可以快速进行行进轨迹规划,具有实际应用价值。
3 结 论
本文将消防机器人进行了详细分类,并在原有轮式机器人的基础上进行改良,设计了轮腿式六足智能消防机器人。实验结果表明,本文设计的轮腿式六足机器人在爬坡过程中其重心轨迹与楼梯轮廓相一致,具备良好的稳定性能。对障碍物路段的轨迹重建时间平均为0.04 s,符合救援应用标准。但由于本人的时间有限,在研究过程中所选择的样本测量形式较少,所得结果具有一定的偏差性,后续会针对此内容进行更加深入的研究,为智能消防机器人的发展和设计提供理论支持。
