基于仿真分析的极端环境下稳定平台的设计及验证
2022-08-26朱伟林
朱伟林
(1. 中国电子科技集团公司第三十八研究所,合肥 230088;2. 安徽省技术标准创新基地,合肥 230088)
0 引 言
随着科学技术的快速发展,雷达装备的应用需求变得越来越广泛,同时也对雷达装备的结构形式及性能提出了越来越严苛的要求,尤其是在高空雷达装备研制方面。稳定平台作为高空雷达装备的重要组成部分,承担着负载的支撑、旋转和隔离作用以及发送、接收指令的作用。当前的稳定平台研究热点主要集中在平台精度方向,在平台环境适应性方面的研究稍显不足,当稳定平台无法适应高空极端环境工况时,会直接影响雷达装备的整体性能和可靠性。为此,本文基于仿真分析设计了一种带温控系统的小型稳定平台,并对其进行了试验验证。
1 系统构成
作为高空雷达装备的重要旋转机构,稳定平台主要包括驱动电机、减速传动机构、角度检测机构、信号传输装置、温控系统、控制器以及框架支撑机构等部件,具体组成如图1所示。驱动系统采用直流减速电机经齿轮减速后,通过电控实现旋转运动。驱动机构主要由直流电机、行星减速器、齿轮副、旋转轴、框架等构成,实现负载的旋转功能。温控系统主要包括加热模块、保温模块、温度采集传感模块以及温度控制模块等,实现平台在低温环境下的加热保温,确保平台内电子元器件能够正常工作。系统工作环境温度为-70~+55 ℃,系统旋转角速度为10 °/s,角加速度为60 °/s2,负载尺寸为1 000 mm×500 mm×500 mm,要求在8级风速下可正常工作,旋转精度0.1°。
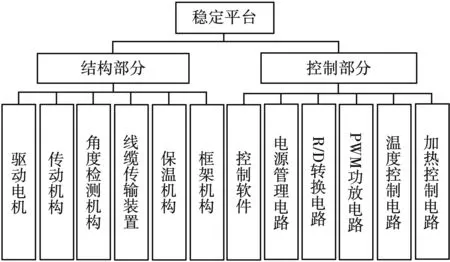
图1 系统组成示意图
2 系统设计
2.1 结构设计
依据稳定平台工作特点分析,稳定平台带动负载进行旋转时主要克服负载启动时的惯性力矩M惯、摩擦力矩M摩以及风力矩M风,其计算公式分别为
M惯=J·ε
(1)
(2)

(3)
式中,J为旋转部分的转动惯量;ε为负载旋转的角加速度;λ为低温系数;风力矩M风为风载荷形成的静态阻力矩与附加动态风力矩之和。
经计算,系统旋转所需克服的最大力矩为
M=M惯+M摩+M风=40 N·m
(4)
根据载荷计算结果,电机驱动功率为
(5)
综合考虑电机预选MAXON系列直流有刷电机,额定功率25 W,额定转速8 330 r/min,额定输出扭矩0.026 3 N·m,减速机选择GYSIN 系列行星齿轮减速机,传动比450,额定输出扭矩15 N·m,最大回程间隙为0.25°,末级选用7级精度齿轮传动,模数1.5,小齿轮齿数18,大齿轮的齿数108,传动比为6。根据设计方案对驱动力矩和转速指标进行校核:
(6)
式中,T1为电机额定输出扭矩;n1为电机额定输出转速;i为系统总减速比;η为传动系统效率。
计算结果满足指标要求,稳定平台结构如图2所示。
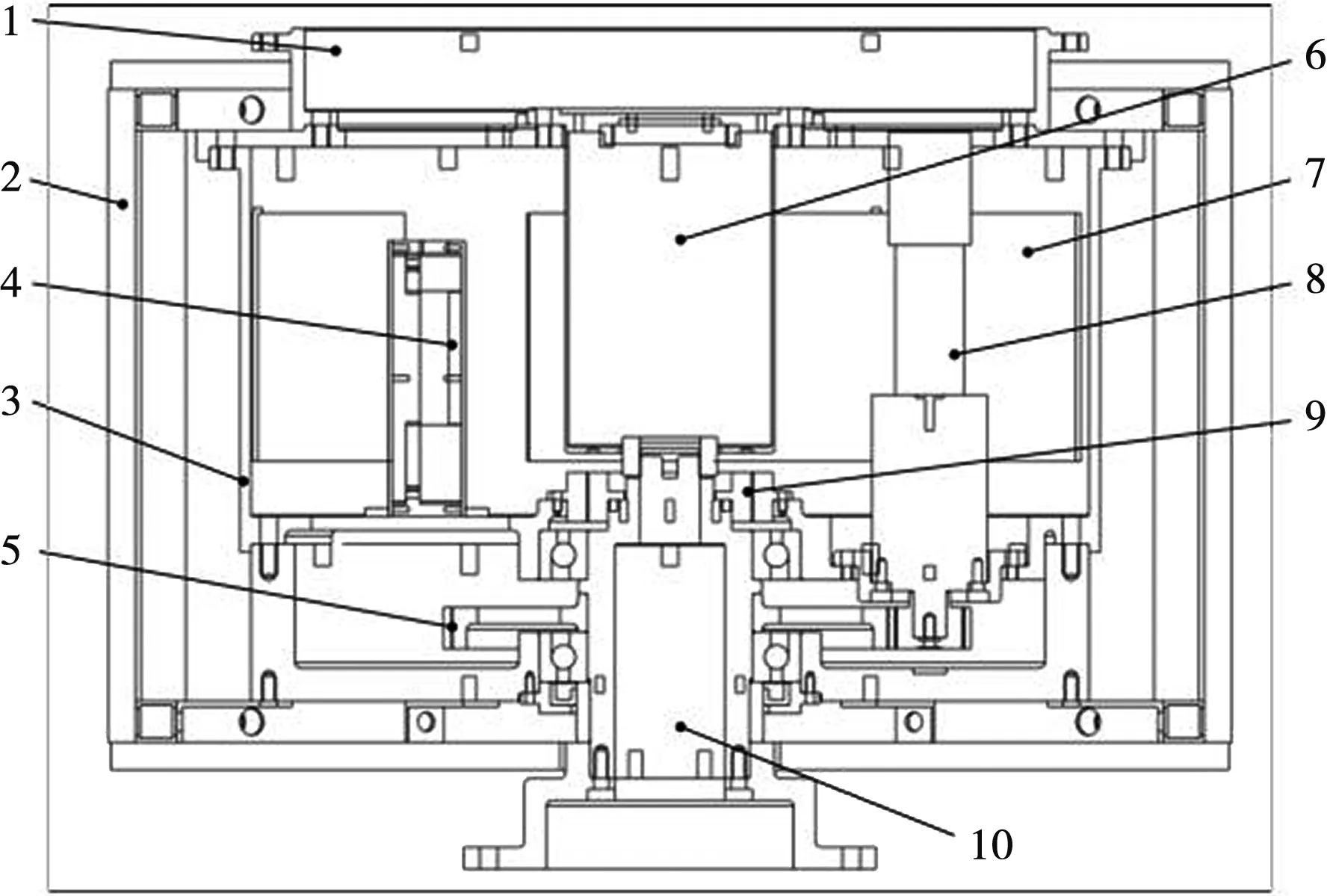
1.法兰 2.保温机构 3.框架机构 4.控制器 5.传动机构 6.线缆传输装置 7.加热模块 8.电机系统 9.角度检测机构 10.输出轴及法兰
2.2 控制设计
伺服控制器主要包括DSP电路、电源控制模块、R/D转换模块、PWM功放模块、制动模块和温度采集控制模块等部分,其中DSP完成逻辑判断、控制运算、系统通讯等;电源控制模块实现板所需电源的转换;RD转换模块实现旋转变压器数据的采集和转换;PWM功放驱动电机;制动模块实现电机制动器控制;温度采集控制模块实现对电机、旋变、轴承等的温度采集和加热控制。
伺服控制器接收系统的数据和工作指令通过角度检测机构检测框架的角度位置,综合工作指令和控制算法产生相应的驱动控制信号,经PWM功率放大后驱动电机运转,实现负载期望运动控制,并向负载反馈伺服系统运行状态信息,如图3所示。
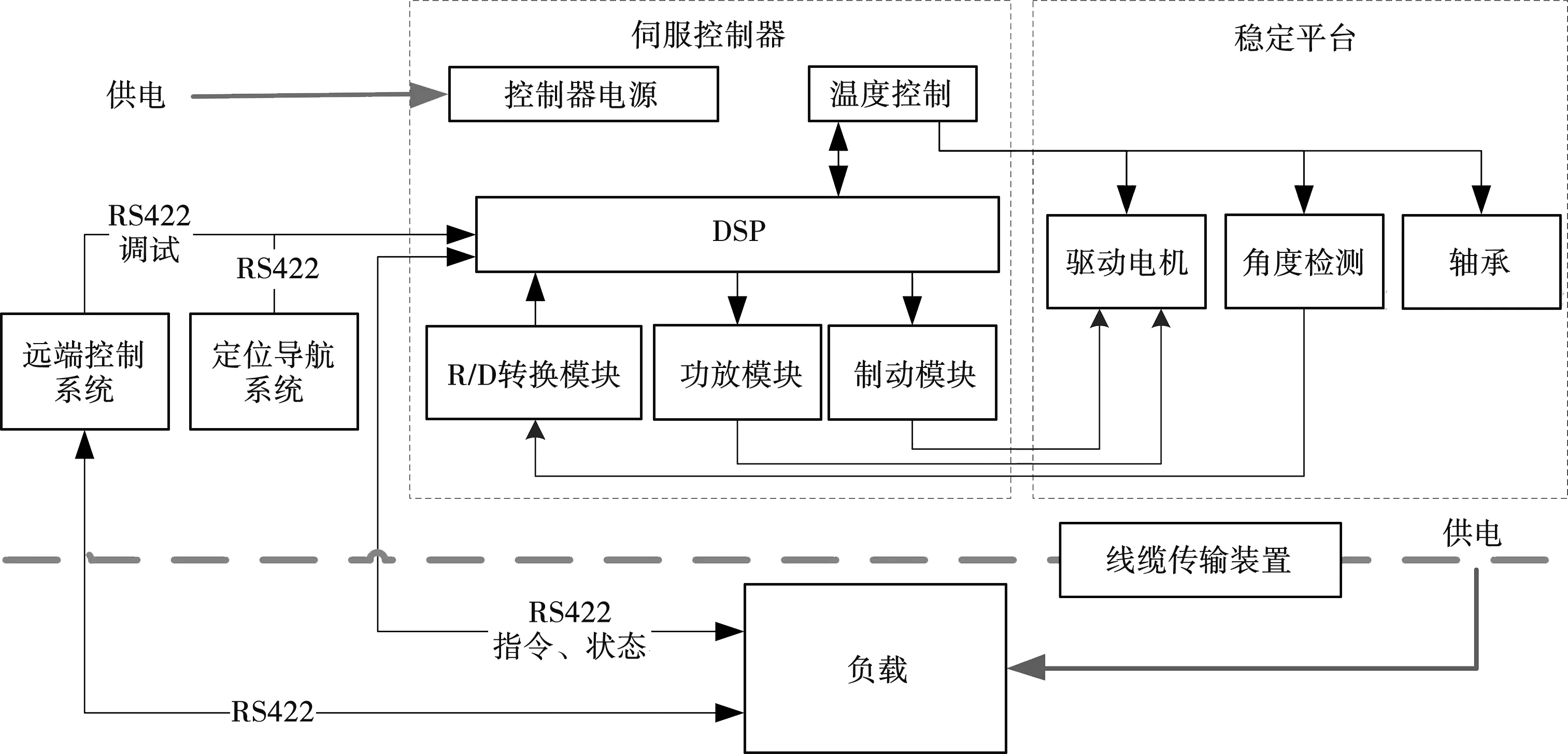
图3 控制系统工作原理示意图
3 仿真分析
结合系统工况,对系统的结构强度进行仿真,施加工况为系统重力外加1.1 g水平方向过载、1.1 g垂直方向过载、20 m/s风速的复合工况,通过仿真可以看出系统最大应力出现在壳体底部以及负载连接法兰处,最大应力为56 MPa,远低于铝合金的许用应力值,系统结构强度满足设计要求。仿真结果如图4所示。
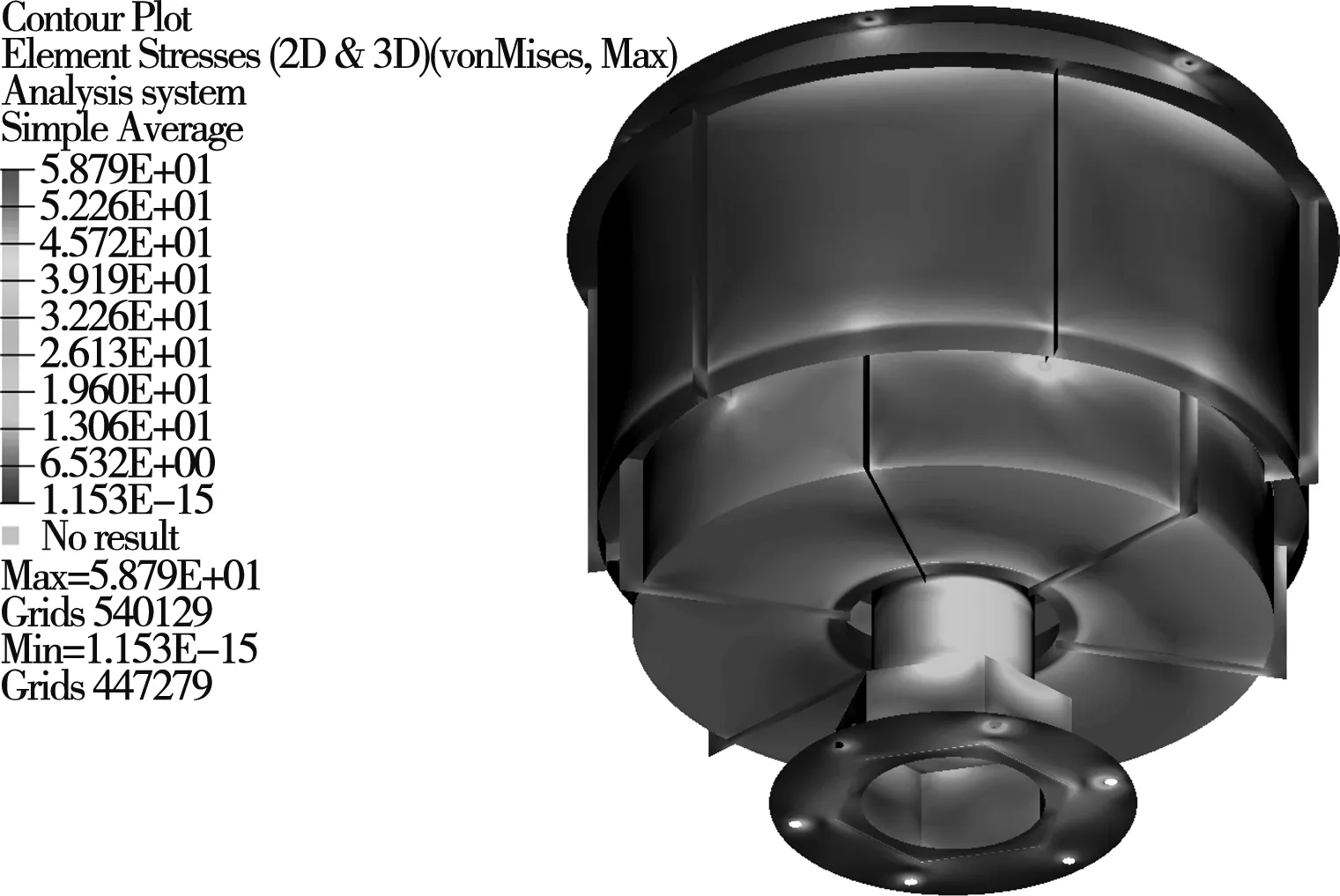
图4 系统力学仿真示意图
由于系统要求工作环境温度为-70~+55 ℃,所以系统需额外增加加热保温机构,通过系统内部元器件正常工作温度及发热和外界环境进行计算仿真,采用国产聚酰亚胺电热膜进行加热,3块功率分别为30 W、尺寸为200 mm×100 mm的加热片均匀贴在平台壳体内壁上,对平台内部环境温度进行加热,可保证内壁驱动组合、传动组合以及控制元器件整体环境温度处于0 ℃,使得系统各元器件均可以正常工作,热学仿真如图5所示。
稳定平台采用齿轮传动方式,安装同轴检测旋转变压器作为角度传感器,其旋转误差主要来源于角度检测误差、结构安装误差、传动链误差、数值计算误差等,传动链误差值、结构安装误差、旋转变压器检测误差、数值计算误差分别为0.05°、0.03°、0.02°、0.04°,基于上述误差分析,稳定平台旋转精度为以上误差分量的均方根:
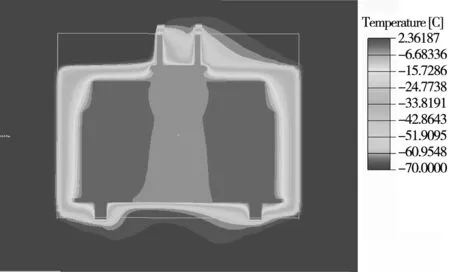
图5 系统热学仿真示意图
(7)
可以看出,稳定平台理论旋转精度为0.074°,满足指标要求。
4 试验验证
依照相关测试要求,对稳定平台实物进行温度及精度试验测试,试验顺序为低温低气压试验-高温试验-精度测试,具体试验方法为:温度降至-70 ℃,气压降至5 kPa后保持稳定4 h,检测稳定平台内温度传感器反馈的温度,同时检测稳定平台的各项性能指标,然后回常压常温后进行高温试验,温度升至 60 ℃,工作保持4 h后,检测稳定平台内温度传感器反馈的温度,同时检测稳定平台的各项性能指标,温度试验完成后对平台的旋转精度进行测试,测试结果如表1所示。
温度试验验证结果如图6所示。可以看出:当环境温度维持在-70 ℃左右时,平台内部检测点反馈温度维持在-10 ℃左右,各电子元器件可正常工作,温控系统对稳定平台内部的温度起到了较好的控制作用,同时稳定平台内部的温度有一定的延迟效果。热学仿真结果为0 ℃左右,由于稳定平台无法做到完全密封,且仿真为理想情况,各部件传热较好,所以试验与热学仿真存在一定的温度差距,但在误差允许范围内。
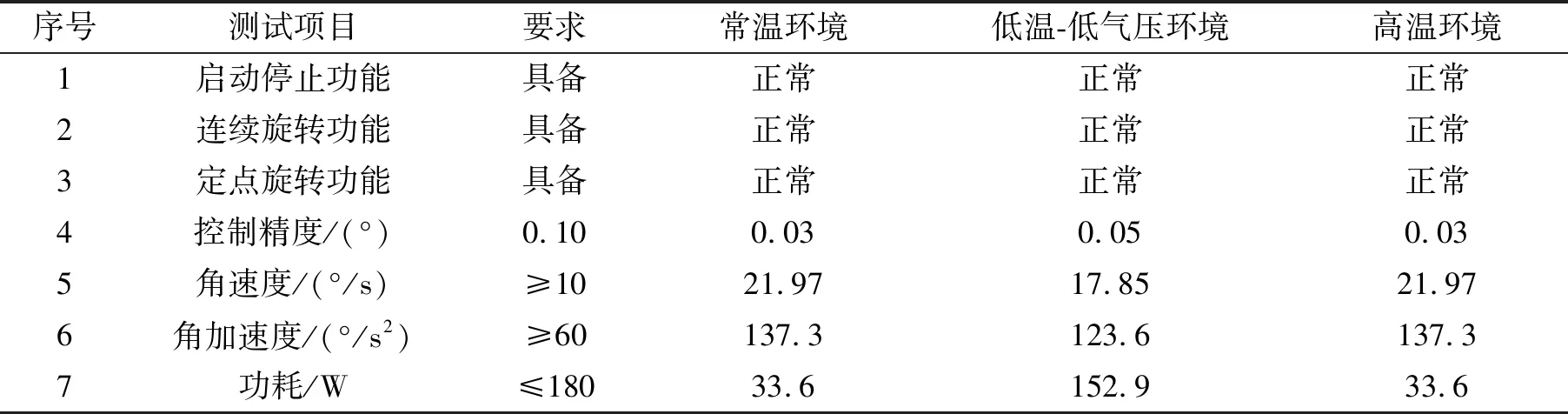
表1 试验测试结果

图6 稳定平台温度检测图
5 结束语
本文对低温低气压极端环境下的稳定平台进行了设计、分析及试验验证,通过研究可以发现,该平台的温控系统在低温低气压极端环境下起到了较好的温度控制效果,保证了稳定平台电子元器件的正常工作,为雷达装备在该特殊环境下的研究提供了技术支撑和应用验证。
