基于模态特性分析的方向盘摆振研究
2022-08-26胡赋鑫闫炳旭张策
胡赋鑫,闫炳旭,张策
(中国矿业大学(北京)机电与信息工程学院,北京 100083)
0 引言
随着技术的发展,人们对驾驶舒适度的要求日益提高,车辆的NVH性能已经成为评价车辆舒适性的重要指标之一,方向盘作为驾驶员的手部直接接触的部位,其振动大小是汽车NVH品质的重要因素。某公司生产的某款皮卡车型,接市场反馈,当车速达到80 km/h以上时,方向盘出现摆振现象。车辆在行驶过程中,转向系统不但承担着转向作用,还承担着从路面-轮胎传递来的振动,这对汽车的操作稳定性、安全性产生了一定的负面影响,严重时甚至会引起安全事故。在行驶过程中,由于制造精度问题,或者是零部件本身性能造成的一些难以避免的问题还是会存在,这些问题无法根除,只能是通过一定的方法来减弱,从而降低其对行驶过程中的不利影响[1-3]。
本文通过使用CATIA对转向系统进行整体三维建模并对其进行适当的简化,在ABAQUS中对转向系统进行模态特性研究以得到其振型以及固有频率,分析方向盘振动的类型。通过合理的优化和建议来改善该问题。
1 有限元模型建立
本文以某皮卡车转向系统为研究对象,该车型具体数据如表1所示。

表1 车辆参数
根据相关参数信息,利用三维建模软件CATIA建立转向系统模型,如图1所示。

图1 转向系统三维模型
在完成建模之后,需要导入ABAQUS软件中,此过程需要转换为中间格式,此次转换的为CATIA V4格式。导入有限元分析软件的装配体图,如图2所示。

图2 简化后的有限元模型
对有限元模型进行前处理,主要包括定义材料属性(如表2)、网格划分、定义接触面、定义边界条件、定义分析步、装配、设置历程输出及场输出。

表2 有限元模型材料
有限元前处理中网格布置种子越多,划分的就会越细致,计算结果也就越准确。但是当网格密度增加1.方向盘2.转向管柱3、5.万向节4.转向传动轴6.左横拉杆7.转向机8.直拉杆9.右横拉杆到某个程度后,网格数量的增多对计算结果的精度几乎无影响,但使得计算时间大大增加。所以需要确定最优网格数量。进行网格无关性检验,使用3种不同尺寸的网格。根据模型尺寸,最终确定为:第一种采用自适应网格划分,第二种和第三种在全局网格尺寸设置中,使用倍数变化的方式,分别在第一种网格尺寸的基础上增大1.4倍和缩小1.4倍。
为节省计算时间,只求3种情况的一阶固有频率,对比结果如图3所示。可知,不同的网格尺寸,得到的固有频率有一定的差异,从数值上看,网格尺寸越大,得到的固有频率越低,因为较粗的网格对结构的细节忽略得越多。再将网格尺寸减小1.4倍后,此时网格数量为744 086个,得到的1阶固有频率为10.33 Hz,说明上述网格模型已基本收敛。故采用自适应网格来进行后续分析,此时网格数量为531 490个。最终得转向系统有限元模型网格划分如图4所示。
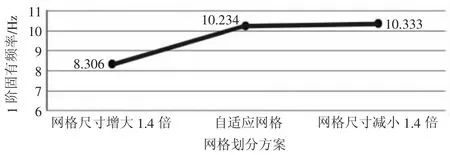
图3 网格无关性验证曲线

图4 转向系统有限元模型网格划分效果图
2 转向系统的模态分析
2.1 模态分析理论
模态分析的目的是确定其系统特性的固有频率和振型等模态参数。确定振动源,并在设计过程中将激励的频率范围与转向系统某阶次振型不发生重合[4]。如果在设计过程中转向系统设计得不合理,导致汽车内部共振,则满足不了NVH的性能要求。
转向系统的振动会造成和车内其它机构的共振,并且使驾驶员感受到不舒适。因此必须了解其模态参数,在充分考虑其受到的惯性力、阻尼力及刚度因素后[5],转向系统的振动微分方程可以表示为

式中:M为质量矩阵;C为阻尼矩阵;K为刚度矩阵;x为质点位移。
并引入下式:

式中:x=[x1,x1… xn]T为几何坐标(质点处位移);φ为模态矩阵(振型矩阵);q=[q1,q2… qn]T为模态坐标。
则将式(2)代入式(1)可得模态解耦方程:

其中,第r阶模态为

式中:ξn为第r阶模态的阻尼比;Mr、Kr、Cr为模态质量、刚度和阻尼,其中Fr=φTrf。
由式(4)可得,第r阶模态坐标为

其特征方程为Kr-ω2Mr+jωCr=0;特征值为λ1,2=σr±jωr。式中:σr为阻尼因子;ωr为第r阶固有频率。
2.2 ABAQUS模态分析过程
本次研究的模态分析的主要步骤:建立三维模型,导入ABAQUS中,并对其进行网格划分,进行装配、定义约束、定义分析步,定义边界条件,求解器选择Lanczos。最终在上述步骤设置完毕后提交作业等待计算结果。其中边界条件的设置要模拟转向系统在整车中装配的实际情况去设定,从而进行约束模态的求解。
根据实际情况分析得,将转向系统的支架与仪表横梁相连的位置约束6 个自由度,如图5所示。转向机壳体与车身相连的地方约束6个自由度,如图6所示。

图5 转向支架约束设置

图6 转向机壳体约束设置
对于传动轴与转向机接触(万向节)的地方施加约束,约束其3个平移方向的自由度,如图7所示。

图7 万向节约束设置
定义连接方式:连接方式的模拟,在转向系统结构上常采用的连接方式有螺接和焊接。针对不同的分析目的,对连接方式的模拟是不同的。本次研究对转向横拉杆与齿条的球头连接采用球铰连接。由于系统的局部运动不是本次的研究重点,所以采用tie连接的约束方式。转向系统整体的约束如图8所示。

图8 转向系统约束及连接设置
对转向系统进行模态分析,在分析步中设置step-1为“线性摄动频率”,特征值的提取方法选择Lanczos(兰索斯)求解器,特征值的提取个数定义为10,创建并提交作业进行计算。当工作状态变为已完成时,进入后处理模块查看最终分析结果,可得前10阶的模态振型。
2.3 模态分析结果
在振型提取过程中,只选取方向盘发生变化的阶次。可得方向盘变化的前6阶模态如图9~图14所示,模态振型频率值及振型分别如表3所示。

图9 转向系统1阶模态

图10 转向系统2阶模态

图11 转向系统3阶模态

图12 转向系统4阶模态

图13 转向系统5阶模态

图14 转向系统6阶模态
通过振型图(图9~图18)可以看出方向盘的主要变型还是以绕着转向管柱为主,在3阶模态之前,是在全局坐标系下,水平面内的以X轴方向、Y轴方向及Y轴切向方向发生旋转所表现的方向盘变形。而在3阶模态之后出现整体水平面内的2阶弯曲,并随着阶数的增加,扭转变形越剧烈,且固有频率随着阶数增加而增加。由表3可知,方向盘的低阶频率主要在10~50 Hz范围内。当方向盘的固有频率小于其所受的激励频率时,会发生共振现象。

图15 转向系统7阶模态

图16 转向系统8阶模态

图17 转向系统9阶模态

图18 转向系统10阶模态

表3 方向盘各阶模态频率
从方向盘振动机理来分析可知,方向盘振动与其产生共振的途径主要为两种:路面-轮胎引起的激励以及发动机激励。从路面-轮胎角度分析得,在高速行驶中,路况良好沥青路面上行驶时,路面激励频率为1~2 Hz。与方向盘1阶频率无重合。故推测方向盘一阶固有频率和车轮1阶激励存在直接联系:本文研究对象使用的轮胎型号是175/65 R14,行驶速度范围在60~100 km/h,该型号轮胎的车速与轮胎1阶激励的关系如表4所示,在该行驶范围内,轮胎的第1阶频率为8.04~13.4 Hz。方向盘的1阶固有频率为10.234 Hz,80 km/h时车轮的1阶激励为10.72 Hz,两者相差4.7%,且车轮1阶激励大于方向盘的1阶固有频率。故分析可得,在行驶过程中,轮胎的不平衡激励是引起方向盘振动的主要原因。
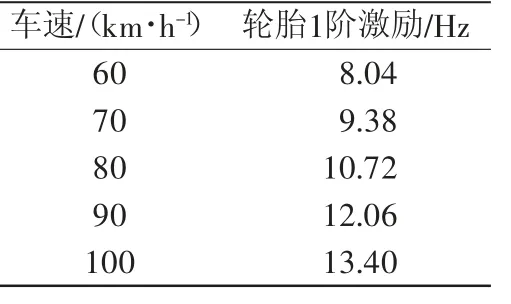
表4 车速与轮胎1阶不平衡激励的关系
从发动机角度分析得:首先需要计算汽车发动机所产生的激励,来判断是否与方向盘产生共振,发动机激励为

式中:f为发动机激励频率;n为发动机转速;m为发动机缸数的一半。
本课题皮卡安装的是直列4缸、四冲程发动机。皮卡发动机怠速的转速为750 r/min,经过计算,发动机怠速下频率为25 Hz,高于第2阶模态频率(13.456 Hz),低于第3阶模态频率(42.006 Hz)。根据车辆设计要求,各系统的频率要避开发动机怠速激励3 Hz以上。因此该车型在此情况下基本不会发生共振。在皮卡正常运行车速下,发动机的转速通常在1400~2000 r/min,经过计算,发动机正常运转时,频率为46.67~70.00 Hz。这个范围与方向盘发生变形的频率范围都不重合。所以针对于该款车型来说,方向盘的振动不是由发动机引起的。
综上分析得,确定车轮转动时的1阶不平衡激励引起了方向盘的振动。车轮的1阶不平衡激励是由其本身不平衡量导致的,而车轮的不平衡量是制造时难以彻底消除的问题。对于解决方向盘振动可以有如下几种解决方法:1)通过修改结构参数来使固有频率与激励频率解耦,其中包括悬架控制臂的衬套刚度及悬架减振器阻尼系数、轮胎的刚度及阻尼系数等。2)对转向管柱支架的结构外形尺寸做改进(如增加厚度等)来提高结构刚度。3)改变轮心到主销的距离,轮心到主销的距离影响着车轮总成对主销产生的力矩,如果该值越小,那么车轮总成绕主销的转动惯量就越小,即振动响应也越小。但由于改变了该值,会导致整个悬架的硬点发生改变,上下控制臂、轮毂、制动盘等零部件需要重新开发,故这个方法在实际中并不采用[6]。4)增加转向盘外圈质量,增大其转动惯量,减小方向盘振动响应。
3 结论
本文针对客户的反馈“在80 km/h时,某型皮卡车的方向盘发生摆振”的现象来进行分析。使用CATIA对某型皮卡车的转向系统进行建模,并使用ABAQUS对其进行约束模态分析,在考虑转向系统实际的装配情况以及表面接触和平移约束的情况下,分析得到了方向盘的6阶振型以及固有频率。在确定激励源时,排除了发动机激励,通过车速与车轮转速的关系分析,得到引起方向盘摆振的原因是车轮在高速旋转时的1阶不平衡激励,从而与方向盘产生共振,进而使得在车辆行驶过程中具有一定的危险,因此需要对其进行结构或者零件参数上的改进。本文利用模态分析分析方向盘摆振问题,在一定程度上为改善汽车NVH性能,提高车辆安全性、振动稳定性提供了理论依据。
