微光多谱段成像仪调焦及像移补偿机构设计与性能分析
2022-08-23曹业豪贺玉坤单博闻彭越洋辛宏伟陈长征
曹业豪,贺玉坤,单博闻,彭越洋,辛宏伟,陈长征
〈系统与设计〉
微光多谱段成像仪调焦及像移补偿机构设计与性能分析
曹业豪1,2,贺玉坤1,2,单博闻1,2,彭越洋1,2,辛宏伟1,陈长征1
(1. 中国科学院长春光学精密机械与物理研究所,吉林 长春 130033;2. 中国科学院大学 北京 100049)
根据某型号微光多谱段成像仪的整机结构特性和工作条件,设计了一种调焦及像移补偿一体化的设备,达到节约空间、保证成像质量以及实现低照度环境下成像的目的。其中调焦功能由丝杠螺母配合楔形滑块实现,像移补偿功能由音圈电机实现,且配合有动、静态两级锁紧装置,使机构的可靠性、抗冲击性显著提高。结构外形尺寸为349mm×192mm×174mm,调焦范围为±2mm,像移补偿量为3mm,调焦分辨率为0.05mm,实测的定位精度为±5.7mm。扫频振动试验得出其一阶模态为225 Hz,与有限元仿真分析结果基本一致,正弦振动试验和随机振动试验结果良好,均在技术指标要求范围内,说明具有良好的动态刚度,可以有效地避免共振现象的发生。综上所述,该调焦及像移补偿机构具有体积小,结构强度高的特点,可以很好地满足微光相机的工作条件。
调焦机构;像移补偿;有限元分析;振动试验;精度分析
0 引言
微光空间遥感成像仪具有在低照度环境下成像的能力,在观测城市夜间灯光、检测颗粒物污染、研究南北极冰川、探测海洋环境等应用领域有着巨大的经济价值和科学研究价值[1]。搭载微光成像载荷的卫星平台在发射过程中,会经历一系列冲击、振荡等严苛的动力学环境,使成像仪内的光学系统组件发生少量的位置变化;光学载荷在轨运行工作的状态下,会由于温度变化、大气压、卫星姿态等空间环境的因素,使光学系统的焦平面发生一定的偏移,即为离焦现象[2-3],若不采取措施补偿离焦量,则会形成一个模糊的图像,严重影响成像质量。因此,高精度的空间相机中都会装有调焦机构来保证感光探测器与像面的重合。
调焦机构是成像仪的核心组件之一,它使得成像仪在应对卫星火箭发射过程中的严苛动力学环境时保证焦平面组件不发生过大的偏离,也能保证成像仪在轨工作运行时CMOS感光探测器与像面重合,对最终的成像质量有着至关重要的影响。为了确保微光多谱段成像仪在低照度条件下获得较为清晰的图像,系统应具备足够的弱信号探测能力,因此需要CMOS感光探测器达到一定时长的连续曝光,以实现凝视成像的效果,这就需要成像仪带有像移补偿功能[4]。
本文结合微光多谱段成像仪的工作特性,采用了调整焦平面组件的方式,设计了一种调焦及像移补偿机构实现两种功能的一体化,在保证定位精度和可靠性的同时,使机构设计尽可能紧凑,轻量化程度更高,提高微光成像仪对工作环境的适应能力。
1 调焦机构的指标
1.1 微光多谱段成像仪的光学系统介绍
微光多谱段成像仪的光学系统示意图如图1所示,该光学系统为离轴反射式,相比于同轴式光学系统,具有大视场、无遮挡、高分辨率的优势,还能减小空间相机的尺寸,但由于其非轴对称的结构,且对反射镜之间的位置精度要求十分严格,给装调带来较大难度。光线通过主镜、次镜、三镜后,汇聚在CMOS感光探测器上成像。当卫星平均轨道高度达到505 km时,该光学系统的幅宽可以达到300km,分辨率可达10m。

1.2 像移补偿量的确定
微光多谱段成像仪要求在城市夜间灯光、极地月光冰雪探测的条件下成像,为了确保微光多谱段成像仪在低照度(入瞳处亮度范围覆盖10-1W/m2×sr~10-4W/m2×sr)的条件下获得较为清晰的图像,满足一定的信噪比要求,需要微光CMOS探测器进行至少200ms的连续曝光,以实现凝视成像的效果。而由于卫星搭载了微光和红外两个载荷,无法进行姿态补偿,因此采取焦平面平移的方式,补偿卫星飞行时形成的像面移动,保证焦平面与像面位置的相对一致。
当卫星轨道的平均高度为505 km,由第一宇宙速度公式计算得卫星相对地心速度为:

式中:sat即为卫星相对于地球的飞行速度;为万有引力常数;earth为地球质量;earth为地球半径。
地面目标移动的速度为:

式中:earth即为地面目标相对于卫星的移动速度。
CMOS成像行频p计算公式为:

式中:¢为后摆角速率;为CMOS探测器像元尺寸,值为11mm;为相机焦距,值为555.5 mm。微光多谱段成像仪在前向移动并成像过程中,姿态角速率保持为0,所以姿态角在理想情况下保持为恒定值,因而¢也为0,行频随时间的变化相对很小。计算后得行频为0.7 kHz。
CMOS探测器的行周期为行频p的倒数,即为1.415 ms。根据要求,探测器需要进行至少200 ms的连续曝光,因此,像移补偿量的最少为:
为了留出有一定的裕度,最终设定的像移补偿量为3mm。
1.3 调焦机构的综合指标确定
光学成像系统都具有一定的允许离焦量,如果焦平面的偏移量在这个范围内则成像质量不会下降,其最大允许的离焦量即为光学系统的半倍焦深:
式中:为半倍焦深;为成像仪的中心工作波长;为光学系统的F数,即相对孔径的倒数;经过计算后得出为±45mm,根据以往工程经验,调焦机构的精度应小于四分之一个半倍焦深,即为±11.25mm,考虑到微光多谱段成像工作的复杂环境,最终将定位精度指标设置为±10mm以内,调焦分辨率设置为2mm以内。通过对离焦因素的分析,最大离焦量约为±1mm,考虑到需留有一定的安全裕度,将最大调焦量设定为±2mm。根据卫星总体提供的外界扰动频率,调焦及像移补偿机构的一阶自然频率应大于100Hz。
2 调焦及像移补偿机构设计
调焦及像移补偿机构如图2所示,其外形尺寸为349mm×192mm×174 mm,总质量为9.8kg(不包括两侧的动态锁紧机构)。

图2 调焦及像移补偿机构
2.1 传动原理的设计
调焦的传动方式按照结构分类,十分多样化,常用的有螺旋机构和凸轮机构[5-6]。螺旋丝杠机构结构简单,占用空间小,加工难度低,传动链短,但抗冲击能力差。凸轮机构通常配合齿轮传件使用,如蜗轮蜗杆机构,能起到稳定的减速作用,易于防冷焊处理,但是难于加工,组件之间为点、线接触,易磨损。
在调试闭环控制曲线的过程中,螺旋丝杠的旋转角度和焦平面组件的理论位移关系是线性的,而凸轮机构则是非线性的,容易造成焦平面组件的定位误差。综合分析了微光多谱段成像仪的工作环境和整机结构,最终选择了丝杠螺母运动副配合楔形滑块导轨的传动方式。
丝杠螺母的自锁性[7],主要取决于机构的导程角和当量摩擦角,若导程角小于当量摩擦角,则具有自锁性,导程角和当量摩擦角的计算公式为:


式中:为导程角;为当量摩擦角;为丝杠螺母的导程;2为丝杠的中径;为丝杠螺母的摩擦系数;为螺纹的牙型角。该丝杠螺母设计成导程为2mm,丝杠中径为15mm的梯形螺纹,牙型角为30°,根据使用材料的特性,丝杠螺母的摩擦系数为0.09,将数值带入公式得导程角=2.43°,当量摩擦角=5.32°,<,说明丝杠螺母的自锁性良好。
像移补偿功能采用音圈电机作为驱动元件,相比于压电陶瓷电机,音圈电机具有体积小、行程长等优势,其位移分辨率理论上取决于测量机构的精度。压电陶瓷的缺点在于其行程较短,一般只有几微米,通常采用叠加压电陶瓷片的形式提高行程。如果该像移补偿结构采取压电陶瓷电机的方案则需要设置位移放大机构,这样就会提高结构的复杂程度,不利于轻量化设计。因此采用三台音圈电机并排排布的方式带动焦平面组件直线运动,实现像移补偿功能。
调焦及像移补偿机构的原理如图3所示。该结构的调焦部分由步进电机、丝杠螺母运动副、光电编码器、楔形滑块导轨以及焦平面组件构成,像移补偿部分由音圈电机、直线位移传感器以及直线导轨组成,两者的运动相互独立,互不干扰。
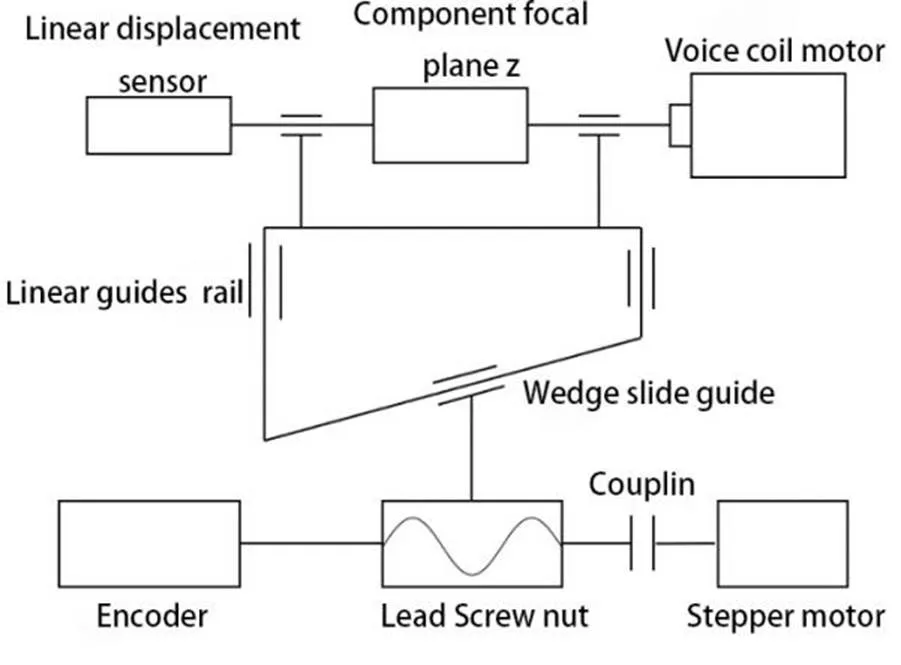
图3 调焦及像移补偿机构传动原理
2.2 动态锁紧机构
为了弥补丝杠螺母的抗冲击能力的不足,提高机构的可靠性,设计了一种动态锁紧机构,其原理如图4所示,可以将其功能理解为一种拔销器。解锁机构将形状记忆合金(shape memory alloys,SMA)作为驱动元件,加工成椭圆环状,将其一端固定在锁紧机构的支撑件上,另一端固定在一个锥销上,锥销的另一端插入焦平面组件的支撑架中,此时焦平面组件的位置被固定,这种状态一直持续到微光多谱段成像仪在轨运行工作前。当卫星完成发射阶段进入空间轨道后,启动加热程序,在记忆合金环两侧分别设置一组加热片,加热片通电后会给记忆合金环加热,触发其形状记忆效应将销拔出,焦平面组件便可以正常移动。

图4 动态锁紧机构示意图
2.3 静态锁紧机构
微光多谱段成像仪的像移补偿功能主要是用在微光条件下,实现凝视成像的效果,当像移补偿不启动的时候,需要保证焦平面组件在该方向上的稳定,因此在音圈电机的运动方向设置一个静态锁紧机构,起到自锁的功能,其结构示意图如图5所示。

图5 静态锁紧机构示意图
音圈电机不工作的时候,静态锁紧装置如左边的状态,由两个滚珠在弹簧的作用下卡住固定杆,防止焦平面组件的移动,当启动像移补偿功能,音圈电机驱动焦平面组件克服滚珠和推杆之间的摩擦力,移动到右图所示的位置,再开始进行像移补偿运动。
3 调焦功能的理论精度
定位精度是衡量精密仪器质量的核心重要指标之一,误差分析可以从理论上预测调焦机构的精度是否符合微光多谱段成像仪的成像质量要求和各项技术指标,是设计调焦机构中必不可少的步骤。
3.1 调焦功能的分辨率
调焦机构的分辨率,即为步进电机每转动一个步进角焦平面组件所移动的距离,也是调焦的最小单位,其计算公式为:
式中:为步进电机的步进角,其值为1.8°;为丝杠螺母的导程;为电机减速装置的减速比,其值为50;为楔形滑块导轨的斜角,其值为15°。
3.2 调焦机构的定位误差
丝杠螺母的梯形螺纹啮合处存在缝隙,其齿形之间也存在着一定的加工精度误差、丝杠中心距的窜动误差。当电机转动一段距离后,开始反向转动的时候,上述因素使螺母不能随之立刻反向运动,这种空回现象会导致定位精度的降低。丝杠在安装过程中也会存在实际位置与理论位置发生偏移的状况。因此引入由丝杠螺母造成的焦平面组件定位误差1=4mm。
考虑到装调时的环境和人为因素,可能会对导轨、丝杠螺母的安装造成一定的偏差,引入由装调造成的定位误差2=3mm。
通过查阅产品手册可知,步进电机的误差最大约为步进角的3%,即0.054°,通过减速器折合到焦平面组件的直线运动上后数值很小,对精度基本没有影响。所选用的14位光电编码器的静态误差最大为0.1°,由此造成的焦平面位置误差为:

编写闭环控制程序时,为了防止由于惯性等因素,使焦平面反复运动,会设定一个控制阈值,若编码器码值在这个范围内,则视为焦平面组件到达了正确位置,因此引入控制误差4=0.98mm。
调焦功能的综合定位误差为:

4 有限元分析
为了研究调焦机构的动力学特性,利用Hypermesh软件对调焦及像移补偿机构进行有限元模型的建立,其中,动态锁紧机构插入焦平面组件中的锥销采用梁单元模拟其锁紧效果;由于编码器,步进电机,解锁机构并不是动力学仿真中研究的重点,因此用质量点代替;CMOS探测器组件数量多,体积小,分布复杂,除了焦平面组件的支撑框架外,其余也都采用质量点代替,与相应的支撑结构件之间使用MPC(multi-pointconstraints)连接。最终建立的有限元模型如图6所示,该模型共包含2036149个3D单元,512934个节点。
模态仿真分析[9]是一种用于确定结构的固有频率和振型的方法,在设计需要承受动态载荷的结构时,其固有频率和振型是需要考虑的重要因素。结构件的模态越高,说明其抗振能力越强,动态刚度越高。调焦及像移补偿机构的前四阶模态分析结果如表1所示,相应的振型云图如图7所示。

表1 调焦机构的前四阶模态
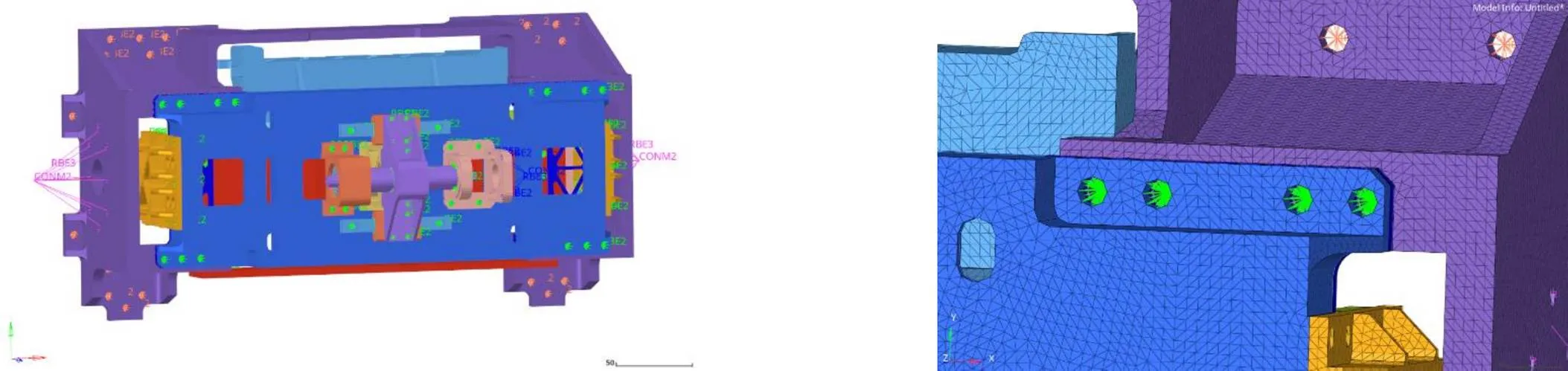
图6 调焦及像移补偿机构有限元模型

图7 模态分析的振型图
从结果中可以看出,调焦及像移补偿机构的一阶基频显著高于要求的100Hz,具有良好的抗振能力和动态刚度。根据一阶模态的振型图可以看出,晃动最强烈的部分为焦平面组件的前端,因此在接下来的振动试验中应该重点关注该位置。
5 定位精度检测
采用闭环控制的方式对调焦功能的定位精度进行检测[10]。本次试验中,使用下位机控制焦平面组件的运动,利用数显千分尺记录36个测量点的焦平面实际位置,并整理出每个目标点与上一个目标点位置的差值,对位移变化情况进行统计,处理数据后的位移变化量的残差如图8所示。

图8 闭环控制位移变化量的残差
位移变化量的标准差为:
式中:V为开环控制位移变化量的残差,根据格拉布斯判别式[11]:

式中:为样本数量,为35;显著度取值为0.05;查表得临界值0(,)为2.81,判别后知测量数据中没有粗大误差的存在。根据“3”原则,则调焦功能的闭环定位精度为:
=±3=±5.7mm (13)
该测试结果满足了±10mm的技术指标,与理论的定位误差较为接近。
6 振动试验
为了检验调焦及像移补偿机构抵御卫星发射时产生的冲击、振荡的能力,了解其动力学特性[12],需要对其进行动力学振动试验(动态锁紧机构用质量块代替)。
6.1 扫频振动试验
扫频振动试验的目的是检测机构在正弦激励载荷的作用下,关键点位置的加速度响应值,来确定机构的自然频率。对机构的三个方向进行0.5的扫频振动试验,加速度频率响应曲线如图9所示,3个方向的模态分别为240Hz、225Hz、243Hz,对比第4章中的有限元模态仿真结果,根据相应的振型,扫频振动试验结果与仿真结果分别相差了5.8%,2.5%,9.5%,误差在可接受范围内,上述结果均显著高于卫星总体要求的100Hz,说明调焦及像移补偿机构可以很好地避免与微光多谱段成像仪发生共振。
6.2 正弦振动试验
正弦振动试验与扫频振动试验原理相同,区别在于正弦振动试验的频域范围小、振幅高,主要针对低频段。其中响应最大的是方向上,100Hz处,焦平面组件的支撑结构上的测量点,此时的激励振幅为3.9,响应振幅为4.25,放大倍率为1.09倍,如图10所示。

6.3 随机振动试验
随机振动试验是用来检测结构件是否会发生变形、损坏的常用方法之一,输入的激励载荷一般为功率谱密度(power spectral density)的形式,计算的结果为功率谱密度与频率的曲线,曲线下的面积即加速度总均方根(grms),通过对比输入和输出的加速度总均方根值得到放大倍率,以此来衡量结构的抗振性能。本次试验的频域为20~2000Hz,加速度RMS为6.52,其中放大倍率最大处发生在方向上,响应的加速度RMS为22.11,放大倍率为3.39倍,试验曲线如图11所示。符合卫星总体提出的小于5倍技术指标,证明机构的抗振能力良好。
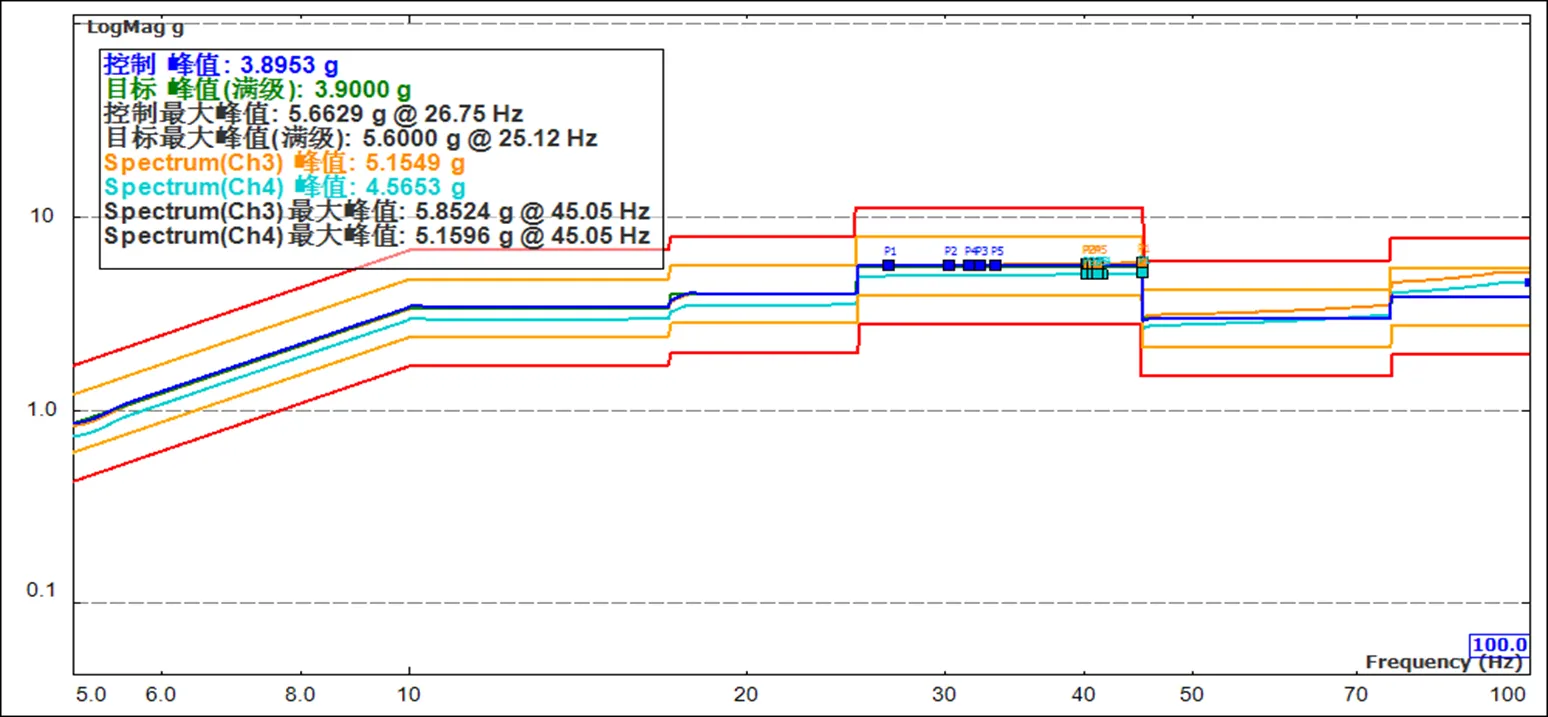
图10 Z方向扫频振动试验加速度响应曲线

图11 Y方向随机振动试验功率谱密度响应曲线
6.4 试验后的锁紧能力检测
在每一个方向的振动试验前后,对调焦机构的编码器码值进行记录和对比,来验证其锁紧效果,记录结果如表2所示。可以看出试验前后码值变化量很小,最大变化量折合成约等于6¢,同时考虑到光电编码器的静态误差因素,可能会存在一定量码值的偏移,因此可以认为焦平面组件未发生位移,调焦机构的锁紧效果良好。

表2 振动试验前后码值对比
7 总结
本文针对微光多谱段成像仪的整机结构特性和工作条件,设计了一种调焦及像移补偿一体化的设备,该设备的最大优势在于,将两种功能结合在一起,在保证达到所需技术指标的前提下,使整体所需要的空间最小化,结构最简单化,且配合有动、静态两级锁紧装置,使机构的可靠性、抗冲击性显著提高。结构外形尺寸为349mm×192mm×174mm,总质量为9.8kg(不包括两侧的动态锁紧机构)。其最大像移补偿量为3mm,最大调焦量为±2mm,调焦分辨率为0.05mm,实测的定位精度为±5.7mm。通过扫频振动试验得出其一阶模态为225Hz,与有限元仿真分析结果基本一致,显著高于设计指标的100Hz。正弦振动试验中曲线跟随状况良好,最大放大为1.09倍,随机振动试验的加速度RMS最大放大为3.39倍,均在技术指标的要求范围内,表明该机构可以适应卫星发射过程中的严苛动力学环境,可以有效地避免机构因发生共振而受到破坏。振动试验前后对编码器码值的对比,说明了调焦机构具备了良好的自锁能力。综上所述,该调焦机构可以很好地满足微光多谱段成像仪的工作需求。
[1] 张元涛. 空间高灵敏度大动态范围微光成像技术研究[D]. 上海: 中国科学院大学(中国科学院上海技术物理研究所), 2018.
ZHANG Yuantao. Research on Low-light Level Imaging Technology with High Sensitivity and Large Dynamic Range[D]. Shanghai: University of Chinese Academy of Sciences (Shanghai Institute of Technical Physics, Chinese Academy of Sciences), 2018.
[2] Hong Dae Gi, Hwang Jai Hyuk. Fabrication and performance test of small satellite camera with focus mechanism[J]., 2019, 13(4): 26-36.
[3] 杨永斌. 空间光学相机调焦技术研究[J]. 航天器工程, 2011, 20(2): 20-24.
YANG Yongbin. Study on focusing technology of space optical camera[J]., 2011, 20(2): 20-24.
[4] 李永昌, 金龙旭, 李国宁, 等. 宽视场遥感相机像移速度模型及补偿策略[J]. 武汉大学学报: 信息科学版, 2018, 43(8): 1278-1286.
LI Yongchang, JIN Longxu, LI Guoning, et al. Image shift velocity model and compensation strategy of wide-field remote sensing camera[J]., 2018, 43(8): 1278-1286.
[5] 姜紫庆, 贾建军. 空间相机透镜调焦机构的设计与测试[J]. 光学精密工程, 2018, 26(12): 2956-2962.
JIANG Ziqing, JIA Jianjun. Design and test of lens focusing mechanism for space camera [J]., 2018, 26(12): 2956-2962.
[6] 柴方茂, 樊延超, 辛宏伟, 等. 焦面二维精密调整机构研究[J]. 光电工程, 2014, 41(1): 6-11.
CHAI Fangmao, FAN Yanchao, XIN Hongwei, et al. Research on two-dimensional precision adjustment mechanism of focal plane[J]., 2014, 41(1): 6-11.
[7] 唐金松. 简明机械设计手册: 3版[M]. 上海: 上海科学技术出版社, 2009.
TANG Jinsong.: 3rd Edition[M]. Shanghai: Shanghai Scientific and Technical Publishers, 2009.
[8] 张洪伟, 徐钰蕾, 李全超, 等. 轻型双波段航空相机调焦机构的设计[J]. 激光与光电子学进展, 2016, 53(8): 252-258.
ZHANG Hongwei, XU Yulei, LI Quanchao, et al. Design of focusing mechanism for lightweight dual-band aerial camera[J]., 2016, 53(8): 252-258.
[9] 辛宏伟. 小型轻质长条反射镜挠性支撑方案研究[J]. 光机电信息, 2010, 27(7): 51-55.
XIN Hongwei. Study on flexible support scheme of small lightweight strip mirror [J]., 2010, 27(7): 51-55.
[10] 许志涛, 刘金国, 龙科慧, 等. 高分辨率空间相机调焦机构精度分析[J]. 光学学报, 2013(7): 284-289.
XU Zhitao, LIU Jinguo, LONG Kehui, et al. Precision analysis of focusing mechanism of high resolution space camera[J]., 2013(7): 284-289.
[11] 刘建, 刘文金. 应用格罗布斯准则判定测量结果中的粗大误差[J]. 木工机床, 2006(2): 26-27.
LIU Jian, LIU Wenjin. Application of grobs criterion to determine the gross error in measurement results[J]., 2006(2): 26-27.
[12] 袁健, 沙巍, 陈长征, 等. 空间相机桁架式支撑结构的集成优化设计[J]. 红外与激光工程, 2015, 44(12): 3661-3666.
YUAN Jian, SHA Wei, CHEN Changzheng, et al. Integrated optimization design of truss support structure for space camera[J]., 2015, 44(12): 3661-3666.
Design and Performance Analysis of Focusing and Image Motion Compensation Mechanism for Low Light Level Multispectral Imager
CAO Yehao1,2,HE Yukun1,2,SHAN Bowen1,2,PENG Yueyang1,2,XIN Hongwei1,CHEN Changzheng1
(1.,,,130033,;2.,100049,)
According to the structural characteristics and working conditions of a low light level multispectral imager, an integrated device of focusing and image motion compensation is designed to be smaller, better imaging quality and low illumination imaging. The focusing function is realized by the screw nut and the wedge slider. The realization of the motion compensation function depends on the voice coil motor, and with the dynamic and static two-stage locking device. The reliability and impact resistance of the mechanism are significantly improved. The overall dimension of the structure is 349mm×192mm×174mm, the focusing range is ±2mm, the image motion compensation is 3mm, the focusing resolution is 0.05mm, and the actual positioning accuracy is ±5.7mm.The first order mode is 225Hz, which is consistent with the result of finite element simulation. The results of the sine vibration test and random vibration test meet the requirements of the technical indicators. It shows that it has good dynamic stiffness and can effectively avoid the resonance phenomenon. The focusing and image motion compensation mechanism has small size and high structural strength, which meet the working conditions of low light level cameras.
focusing mechanism, image motion compensation, finite element analysis, vibration test, Accuracy analysis
TH122;V443+.5
A
1001-8891(2022)08-0837-09
2021-04-21;
2021-06-21.
曹业豪(1998-),男,浙江省金华人,硕士研究生,主要研究方向为空间光学遥感器结构设计。
陈长征(1976-),男,山东省宁津人,研究员,工学博士,主要研究方向为空间光学遥感器总体设计。E-mail:chencz@ciomp.ac.cn。
国家自然科学基金(11803036)资助项目。