基于数码观测式分光计的劳埃德镜干涉实验
2022-08-23童利凭王凤鹏张玉强曾泽楷
童利凭,王凤鹏,张玉强,黄 赣,曾泽楷,刘 聪
(赣南师范大学 物理与电子信息学院,江西 赣州 341000)
光的干涉是大学物理、光学等课程的重要教学内容,开展光的干涉实验不仅能很好地锻炼学生的实验动手能力,还有助于学生更好地理解光的干涉原理. 实现光的干涉通常有分波前法和分振幅法. 利用分振幅法进行干涉实验的装置有牛顿环、劈尖、迈克耳孙干涉仪等,利用分波前法进行干涉实验的装置有菲涅耳双面镜、菲涅耳双棱镜、劳埃德镜等[1]. 目前,大学物理实验课程中常做的实验有牛顿环或劈尖等厚干涉实验、迈克耳孙等倾干涉实验、双棱镜干涉实验[2]等,但很少用菲涅耳双面镜和劳埃德镜开展实验教学,这主要是因为:与菲涅耳双棱镜相比,菲涅耳双面镜实验方案的光路调节更为困难,而在劳埃德镜实验方案中,虚像光源与实际光源之间的距离测量比较困难. 因此,近年来只有少数实验研究报道将劳埃德镜用于微小尺度测量[3-4]、薄膜厚度测量[5],而没有用劳埃德镜验证双缝干涉原理的实验研究. 此外,传统实验中通常采用测微目镜或显微镜观测干涉条纹,由于测微目镜或显微镜的视场较小,使得教师不能边讲解边展示实验现象. 利用数码相机作为观测工具可以较好地解决这些问题[6-8].
本文在已有的数码观测式分光计的基础上做进一步改进,设计了实现劳埃德镜干涉的实验方案,通过测算光源波长来验证双缝干涉的实验原理.
1 实验原理与方案
1.1 数码观测式分光计的结构
文献[7]提出了数码观测式新型分光计,其结构如图1所示,其中1~9为利用数码相机替代传统望远镜及支架的部分,其余结构与传统分光计相同. 将数码相机固定在鸠尾板上,鸠尾板可在鸠尾槽中前后移动,从而使数码相机靠近或远离载物台,在合适位置处固定. 鸠尾槽通过弹簧片与T形立柱连接,T形立柱上设有数码相机俯仰调节螺丝,用于调节数码相机的俯仰角. T形立柱安装在转座上,使数码相机可绕旋转轴旋转.

1.T形立柱 2.数码相机俯仰调节螺丝 3.弹簧片 4.鸠尾槽 5.数码相机前后固定螺丝 6.鸠尾板 7.数码相机 8.镜头紧固环 9.镜头紧固螺丝图1 数码观测式分光计
1.2 劳埃德镜干涉实验原理
拆下数码观测式分光计中准直管部分的准直透镜和数码相机的镜头,在载物台上垂直放置平面反射镜,即可进行劳埃德镜实验. 如图2所示,平面反射镜竖直放置在分光计的载物台上,并使狭缝S的方向与镜面平行. 固定刻度盘和数码相机的位置,使游标盘和载物台带反射镜一起转动,当狭缝S处在平面镜镜面内时,如图2(a)所示,光束直接照射到数码相机的图像传感器上,此时没有干涉现象,但在明暗交界处会出现边缘衍射现象. 然后,轻微转动游标盘使平面镜偏转小角度θ,如图2(b)所示,此时,从狭缝光源S发出的光一部分掠入射到平面镜后反射到数码相机的感光元件上,另一部分直接投射到数码相机的感光元件上. 在数码相机感光元件上2束光的交叠区域里将出现等间距的干涉条纹.

(a)无干涉现象 (b)有干涉现象图2 劳埃德镜实验装置示意图
假设狭缝光源S到平面镜镜面的垂直距离为a,根据劳埃德镜干涉原理[1],可得光波波长为
(1)
其中,D为狭缝光源S到数码相机感光元件的距离,Δx为干涉条纹间隔.测出分光计中狭缝S到旋转轴的距离L,根据几何关系可以得到a=Lsinθ≈Lθ,则式(1)转换为
(2)
因此,只要测出L,D,θ和Δx,就可根据式(2)计算出光波波长,从而验证双缝干涉原理.
1.3 实验方法
1.3.1 实验装置调节
基于数码观测式分光计的劳埃德镜干涉实验装置如图3所示,其中准直管部分未安装准直透镜,数码相机未安装镜头. 由于实验中利用分光计游标盘测量的角度很小,且不需要用到平行光,因此对分光计的调节要求较低,只需使载物台大致垂直于旋转轴即可. 具体操作如下:
1)将平面反射镜垂直放置在载物台上. 拧紧数码相机止动螺丝和数码相机与刻度盘离合螺丝,使该度盘和数码相机的位置固定.
2)拧紧载物台和游标盘间的锁紧螺丝,松开游标盘上的止动螺丝,使游标盘和载物台可带着反射镜一起转动.

(a)俯视
1.3.2 调节干涉条纹
转动游标盘改变平面镜角度,使在数码相机显示屏上观察到2束光的交叠区在明暗分界线附近,如图4所示. 调节狭缝宽度和方向,当狭缝宽度满足空间相干性条件[1]且方向与平面反射镜严格平行时,交叠区可观察到清晰的等间距的干涉条纹,如图4放大部分所示,用数码相机拍摄干涉条纹图.
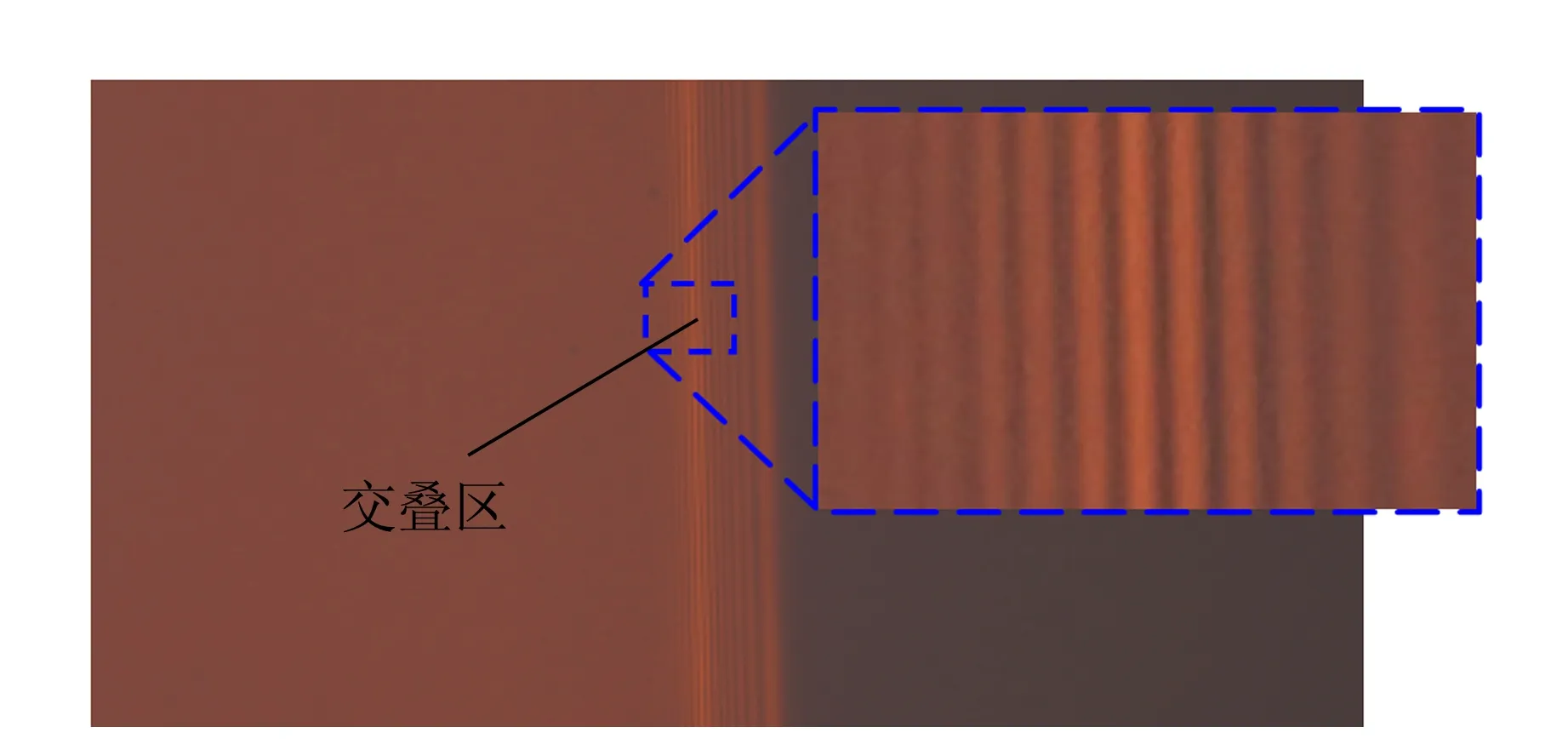
图4 劳埃德镜干涉条纹
1.3.3 测量θ角
拍摄记录干涉条纹图的同时,记录下游标盘对应的刻度值φ1.缓慢转动游标盘,使干涉条纹变粗,直到等间隔干涉条纹消失,而只有边缘衍射条纹,如图5所示.记录此时游标盘对应的刻度值φ2.则
θ=|φ1-φ2|.
(3)
值得注意的是,测量刻度值φ2时容易出现误差,可通过多次观测来提高测量精度.

图5 边缘衍射条纹
1.3.4 测量L和D
利用直尺测出狭缝到旋转轴的距离L和狭缝到数码相机感光元件的距离D.
1.3.5 测量Δx
将1.3.2中拍摄记录的干涉条纹图导入电脑,利用Matlab或GIMP等软件测出条纹间距对应的像素数,利用像素数与像素大小相乘便可以得到条纹间距Δx. 以GIMP软件为例,在GIMP软件中打开干涉条纹图,选择合适的放大倍数(如400%)显示图片,找到条纹区,点击工具,再点击测量,测出N(可取10或20)个条纹间隔对应的像素数.
2 实验方案的运行结果及分析
为验证本文提出的实验方案,采用索尼NEX-7数码相机(图像传感器面积:23.4 mm×15.6 mm,像素数:6 000×4 000,像素尺寸:δ=3.9 μm)进行实验,采用波长为589.3 nm的钠灯作为光源. 由于数码相机的感光面积较大,因此实验时很容易观察到2束光的交叠区,调节狭缝宽度和方向,通过数码相机电子显示屏的放大功能可以观察到清晰的干涉条纹. 调节游标盘改变反射镜方向,通过数码相机的显示屏,可以直观地展示干涉条纹宽度的变化,教师只需进行简单地指导就可让学生自行探索其中的规律. 在不同θ下拍摄记录劳埃德镜干涉条纹图,其中3幅图如图6所示.
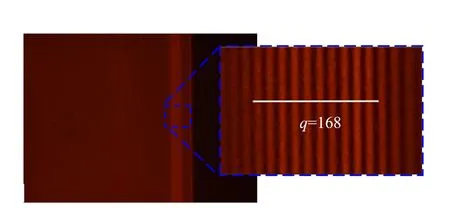
(a)θ=0.006 69 rad
因分光计有2个游标进行读数,故θ的计算公式可由式(3)改写为
(4)
测量φ2时,重复观测3次,取平均值.使用GIMP软件中图像测距工具测出10个条纹间隔对应的像素数q,如图6中白色线段所示.再利用
(5)


表1 劳埃德镜干涉测波长实验结果
根据误差理论公式,先求出各个变量的不确定度,其中D和L是利用最小分度值为1 mm的直尺测量的,且在测量过程中存在对准的不确定性问题,则uB(D)=uB(L)=1 mm.θ由最小分度为1′的分光计游标盘测量所得,uB(θ)=0.000 17 rad. Δx可以以数码相机感光元件的像素大小作为最小分度值,根据式(5)可得,uB(Δx)=0.23 μm.由误差传递公式计算出波长测量的B类不确定度为uB(λ)=0.017 μm.
最后采用方和根合成法,可得到测量的波长不确定度为0.02 μm.因此,波长测量结果为
λ=(0.59±0.02) μm,
Er=3.4%.
以上实验结果表明,本文提出的实验方案测量结果准确,其相对偏差小于5%,符合实验教学要求.
3 结束语
利用数码相机对分光计进行数字化改造,不仅可以更方便地开展分光计的调节和使用、透射光栅等实验,还可进行劳埃德镜干涉实验. 在数码相机未安装镜头的情况下,载物台上放置平面反射镜,由游标盘测出有干涉现象时到干涉条纹刚好消失时载物台转过的角度,从而计算出狭缝光源到反射镜的垂直距离. 利用数码相机观察拍摄劳埃德镜干涉条纹图像,有利于学生更好地掌握实验装置的调节方法和相关实验原理. 通过数码图像测量干涉条纹间隔,可避免产生回程误差. 实验中需要用到的GIMP等图像处理软件,操作简单,学生易上手. 从数码图像中提取实验数据,可让学生接触到现代信息技术知识,有利于激发学生的实验研究兴趣.
