一种强杂波区目标检测跟踪算法
2022-08-23赵会娟薛垒杜君南汪敏
文|赵会娟 薛垒 杜君南 汪敏
针对强海杂波环境下的目标检测跟踪问题,本文提出了一种基于环境感知的目标检测跟踪模型。通过杂波区域感知和点迹过滤建模,降低虚假回波点迹。提出了M周期-航迹分裂检测算法实现了强海杂波环境下的目标检测跟踪。通过实际数据验证,该模型能提高强海杂波环境下的目标检测跟踪性能,有效抑制虚假目标航迹。
一、引言
雷达处理系统中,杂波是指有海面杂波、气象、射频干扰和人为干扰所产生的信号,若信号处理算法无法抑制上述信号,会导致雷达显示画面上呈现较多虚警回波点迹,增加了目标航迹起始和航迹维持的难度,尤其是强杂波环境下的目标检测跟踪。强杂波环境下的目标检测跟踪问题采用多假设算法,可以获得最优检测跟踪效果,但是该算法随着目标数目以及杂波密度的增加,容易产生组合爆炸问题。针对强杂波环境下的目标检测跟踪问题,本文提出了一种基于环境感知的检测跟踪模型。首先对多帧累计点迹的分布特性进行建模,自适应感知出强杂波区域。对强杂波区域,以点迹幅度建立非参数统计模型进行点迹过滤。最终过滤处理后的点迹,采用航迹分支算法实现杂波区目标的检测跟踪。
二、杂波区检测处理
雷达处理系统中要让雷达处理设备自适应实现杂波区域的感知。设雷达探测距离为km,全方位探测。首先,按一定距离量化和方位量化将雷达探测区域网格化。其次,将雷达每个扫描周期的检测点迹分别根据距离量化和方位量化映射到相应的网格单元。当扫描周期满足到区域感知周期门限时,对每个网格单元的点迹数进行排序,点迹密集网格即自动识别为强杂波区。对于强杂波区中的点迹,传统点迹过滤算法是依据目标点迹和杂波点迹在距离宽度、方位宽度上的差异,对于距离宽度或者方位宽度小于一定门限的点迹进行过滤,这种处理方法对目标统计特性有很强的依赖性,极易将杂波区中的小目标误认为杂波,导致小目标检测能力降低。本文对点迹幅度特征建立非参数统计模型,自动估算出最优幅度门限,实现点迹过滤。

三、目标检测跟踪
对杂波网格内点迹进行过滤处理后,网格内仍会存留一定的剩余点迹。受剩余点迹密度分布的影响,逻辑起始算法以最优邻近数据关联算法为基础,将落在波门内的最优点迹作为目标,该方法容易将目标关联到错误点迹造成目标检测跟踪丢失,导致目标跟踪性能下降。多假设(MHT)数据关联算法采用后验概率来检测评估最优目标航迹,但是其检测跟踪目标数随着杂波点迹密度的增加而呈现几何级数增长,容易产生组合爆炸问题。因此,本文综合逻辑起始法和多假设法的优缺点,提出了一种M周期-航迹分裂检测算法,优化了MHT算法。M周期-航迹分裂检测算法的核心思想为M周期内,采用航迹分裂方法对点迹-点迹数据关联的结果进行多条可能航迹的预测,对于满足起始要求的可能航迹进行快速判断。这种算法即避免了MHT检测过程中的组合爆炸问题,又提高了最优邻近算法的跟踪准确性。


四、算法验证
本文采集了某海域的强杂波环境数据用来验证杂波区域感知、点迹过滤和M周期-航迹分裂检测算法的处理效果。图1为杂波区域感知示意图。可见该型雷达在近距离受海浪杂波影响较严重,信号处理后产生了大量的剩余回波点迹。经本算法的自适应环境感知模型准确识别出强杂波区域。图2在感知识别杂波区的基础上利用幅度模型对杂波点迹进行过滤。雷达检测后的剩余点迹每帧在2000点左右,过滤后点迹只有1200点左右,点迹过滤效率在60%。图3为M周期-航迹分裂检测算法的处理效果。可见,该算法能快速检测出目标。同时,在此强杂波环境下,虚假目标控制的较好,提高了雷达检测跟踪的性能。
五、结语
本文提出了一种基于环境感知的目标检测跟踪模型,采用杂波环境感知、点迹过滤和M周期-航迹分裂检测算法实现了强海杂波环境下的目标检测跟踪。通过实际雷达杂波数据验证,实现了强杂波环境下的目标检测跟踪,有效地抑制了虚假目标航迹,具备一定的工程应用前景。
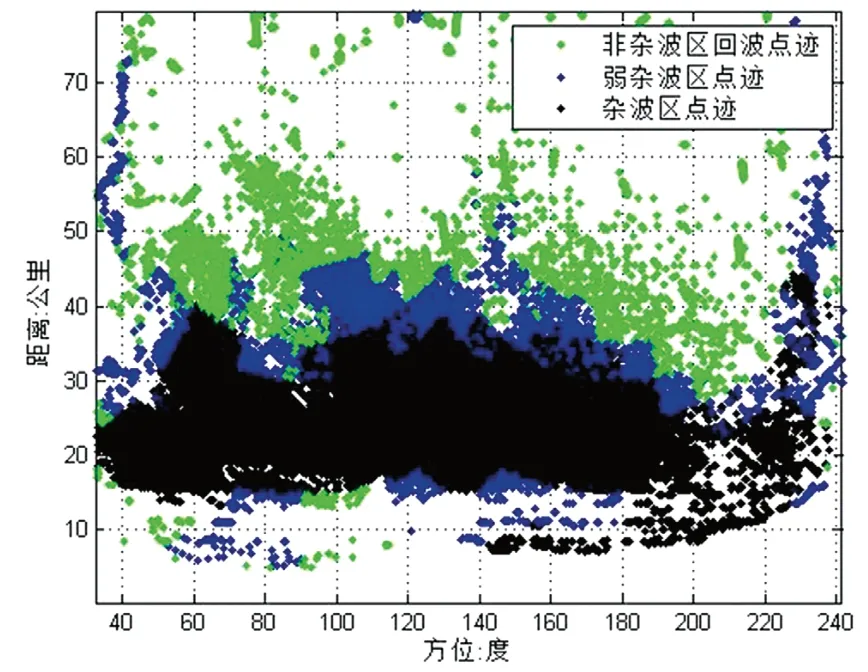
图1 区域感知示意图
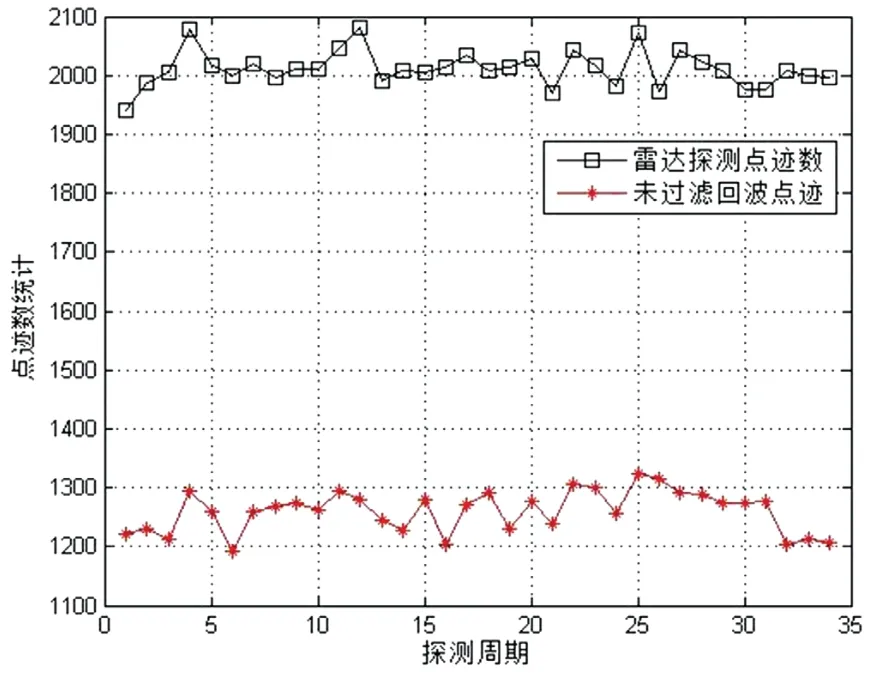
图2 点迹过滤示意图
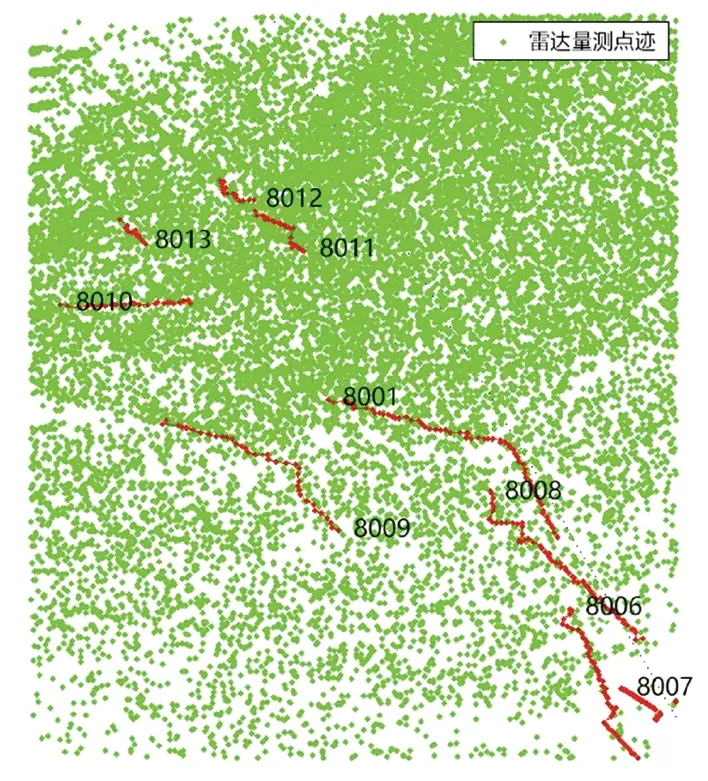
图3 目标检测跟踪示意图
