考虑波浪漂移力的渔船骑浪/横甩计算和临界区域规避
2022-08-20叶沈阳陈思源张宝吉
叶沈阳 陈思源 何 适 张宝吉
(1. 上海海事大学 海洋科学与工程学院 上海 201306; 2. 上海海事大学 商船学院 上海 201306)
0 引 言
船舶在随浪或尾斜浪中航行时,波浪从船后方接近船尾,最终将船舶捕捉,船舶同波浪一起前进。此时,即使打出最大舵角也无法保持航向,此种现象称为横甩,横甩时通常会有很大的横摇角导致船舶倾覆。大量的海难事件表明,横甩通常发生在一些中小型高速船上。因此,近年来IMO将骑浪横甩列为二代完整稳性中的1种失效模式。对于骑浪横甩的研究首先是判断该船型是否满足 第1层和第2层薄弱性衡准,若不满足,就要进行直接评估。在薄弱性衡准校核方面,国内外的研究已很成熟,一系列软件相继出现。而对横甩的直接评估,由于其机理复杂,研究者相对较少。
近年来,随着人们对非线性动力学研究的不断深入,将非线性动力学研究成果应用到横甩的研究中成为可能。日本UMEDA最早开始研究船舶横甩问题,随后人们开始采用非线性动力学理论Melnikov法去研究骑浪问题。针对横甩的直接评估,UMEDA等先后建立四自由度操纵性耦合方程,对横甩现象进行数值模拟。于立伟等采用耐波性和操纵性统一理论建立了六自由度弱非线性运动模型,研究了骑浪横甩的数值模拟问题,范佘明基于Z形试验结果,采用六自由度操纵性模型对横甩现象进行了预报。低频慢漂运动会对船舶的运动状态产生影响,张晓磊等在研究救助船的操纵性运动时考虑了波浪漂移力的作用。ZHANG等建立了三自由度操纵性模型,采用Rankine源法计算了二阶波浪漂移力,对S175集装箱船进行了回转和Z形运动仿真。刘聪等基于计算流体动力学(computational fluid dynamics,CFD)法计算了DTC船型在斜浪作用下的漂移力。VADIM等基于CFD法建立了数值波浪水池,将波浪漂移力加入到波浪力中,研究了ONR船的骑浪横甩问题,并通过模型试验进行了验证。
本文在总结前人研究成果的基础上,以四自由度操纵性方程为基础,将经验公式计算的波浪漂移力加入到波浪力公式中,研究渔船在不同波长船长比,不同舵角下的运动规律,并和没有考虑波浪漂移力的计算结果进行比较;再以此数据为基础,研究船舶航行临界区域的预测方法,判断航行的临界速度和航向角,并和已有的实验结果进行比较,进而提出船舶航行规避危险区域的指导性意见和建议。
1 船舶四自由度运动模型
本文使用的是船舶的四自由度运动模型,坐标系和方程如下:
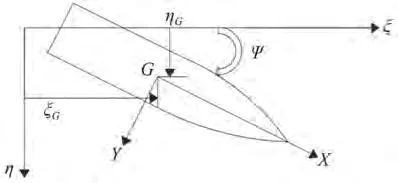
图1 操纵性方程运动坐标系



控制方程中,波浪力的计算方法参考文献[17]。
基于船舶骑浪横甩第2层薄弱性衡准,提出横甩直接数值评估衡准数的计算公式:

2 漂移波浪力的计算方程
对四自由度MMG操纵性模型进行扩展,在纵向波浪力、横向波浪力和艏摇力矩中加入对应方向的波浪漂移力经验公式。



从6个公式中可以看出,除了艏摇角以外,其他量都是船本身或波浪本身设定的常数,因此式中都是以为自变量计算的。
3 骑浪/横甩在随浪和尾斜浪下的 直接模拟
选有义波高=1.5 m、1.5 m、2.5 m和对应的为过零周期7.5 s、7.5 s、8.5 s 3种发生概率最大的随浪和尾斜浪不规则波为算例,船的初始艏摇角取0°~30°,临界弗劳德数()取0.1~0.5;改变船的舵角和初始速度,以ITTC ship A2渔船作为研究对象,计算渔船在规则波下航行时发生骑浪横甩的规律,绘制图像。渔船的参数如表1所示。

表1 渔船船型主尺度和船型参数
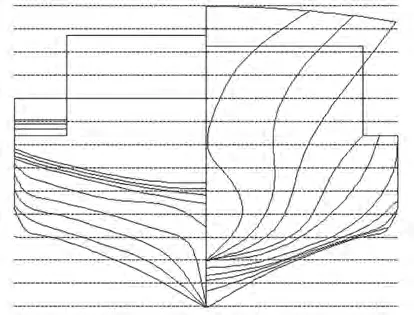
图2 ITTC ship A2渔船横剖面型线图
计算临界从0.1~0.5,间隔变化0.01,初始艏摇角从1°~30°,间隔为1°,共计算41×30= 1 230组数据,并且针对波长船长比、波陡和临界转速等同样进行对照实验。图3是未加入和加入波浪漂移力时渔船运动状态变化关系图。

图3 渔船的运动状态变化
由图3可知:加入波浪漂移力之后,在初始艏摇角较小时,渔船的运动状态主要是周期性运动和骑浪,但当角度增大后,伴随着临界的增大,船舶开始出现倾覆,并且随着角度越大,倾覆的比例越高。与未加入波浪漂移力的情况进行对比,可以发现加入漂移力后运动的走势变化大致与未加入时一致,不过周期性运动和骑浪的分界线在0.34上,较未加入波浪漂移力的情况更高,说明在加入波浪漂移力后,船的运动状态更稳定;并且船在已计算的数据中没有发生横甩,倾覆概率也更小,因此横甩衡准值为0。
固定初始艏摇角为0°,保持临界螺旋桨转速为4.125 r/s,改变波长船长比和波陡进行渔船运动仿真。
初始艏摇角为0°时,渔船的运动状态如图4所示。由图4可知:加入波浪漂移力之后,渔船的周期运动和骑浪运动范围增加,倾覆范围减小。
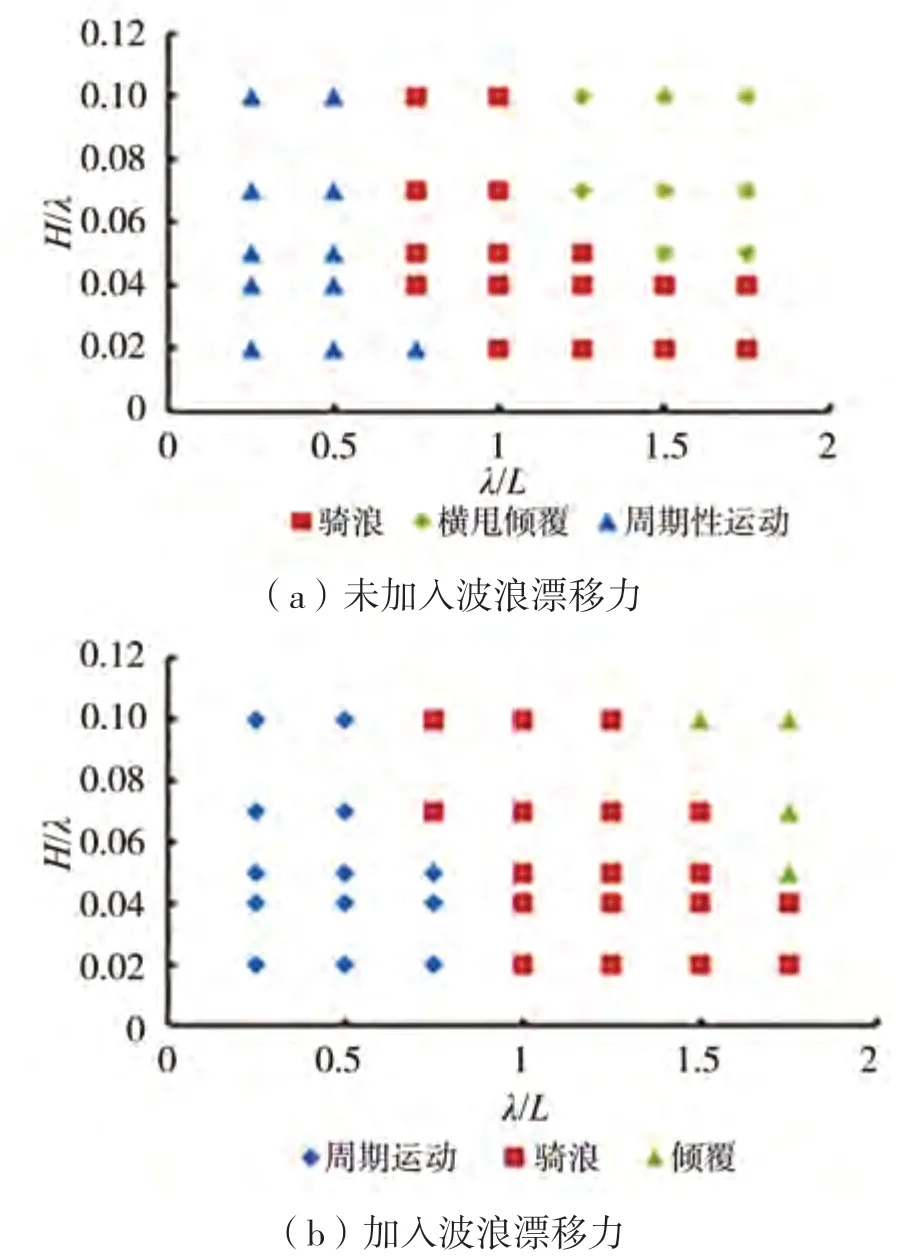
图4 初始艏摇角为0°,渔船的运动状态
初始艏摇角为-15°时,渔船的运动状态如下页图5所示。由图5可知:加入波浪漂移力之后,渔船的运动状态几乎全部变为倾覆,说明加入波浪漂移力之后,初始艏摇角对渔船的运动状态影响极大。
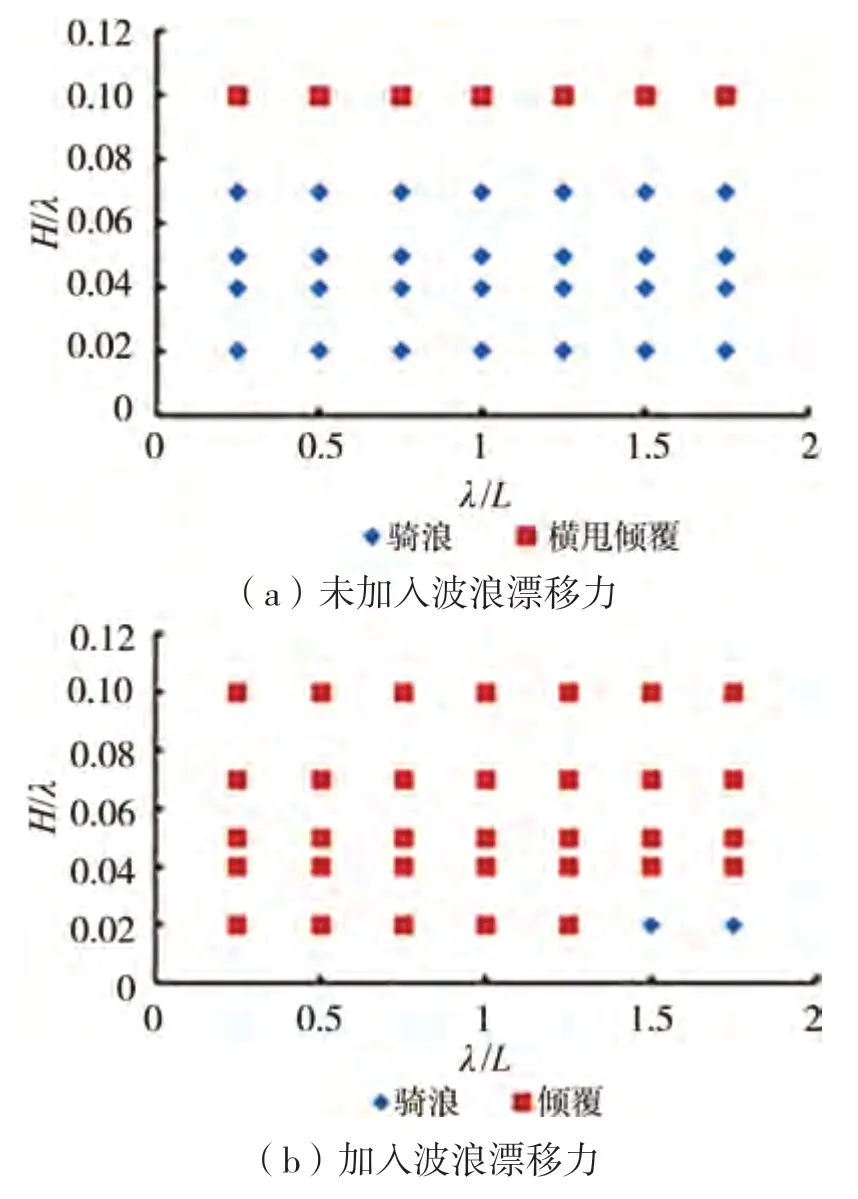
图5 初始艏摇角为-15°,渔船的运动状态
综合以上计算结果,可得出以下结论:
(1)周期性运动与变化的边界由原来的临界0.3变化为0.34,在波陡和初始艏摇角都较小的情况下,不稳定区域更小。
(2)受到波长船长比、波陡变化的影响与无波浪漂移力类似,不过周期性运动的范围更大。
(3)更容易受到初始艏摇角的影响,在经过某个临界值后,船的不稳定性会极大增加。
总体来说,加入波浪漂移力会使在低波陡等参数下的运行状态更平稳,而在高波陡高转速的状态下更危险。
4 骑浪/横甩临界区域和规避
4.1 背景介绍
由前面的数据分析可以得出:影响航行最重要的因素有波参数、航速和浪向角,而波的因素是无法人为改变的,能够改变的只有航速和浪向角;确定船在不同速度下和浪向角的关系,从而确定不同程度的危险性变得尤为重要。本节将研究船舶航速与波浪、与船夹角直接变化规律,从而确定船在航行中的临界区域和危险区域。
4.2 模型参数设置
将船的遭遇波设置为规则波,计算ITTC ship A2渔船在波长船长比为1、波陡为1/15时,等效浪向角的变化,其中船舶航速和船长开根号比值的变化范围是0.8~3,间隔为0.2,等价于速度由2.4 m/s增至9.1 m/s,自动航向角的范围取-45°~ 45°,间隔为5°,共计算12×19=228组数据。图6显示了渔船随航速、浪向角的运动状态变化。
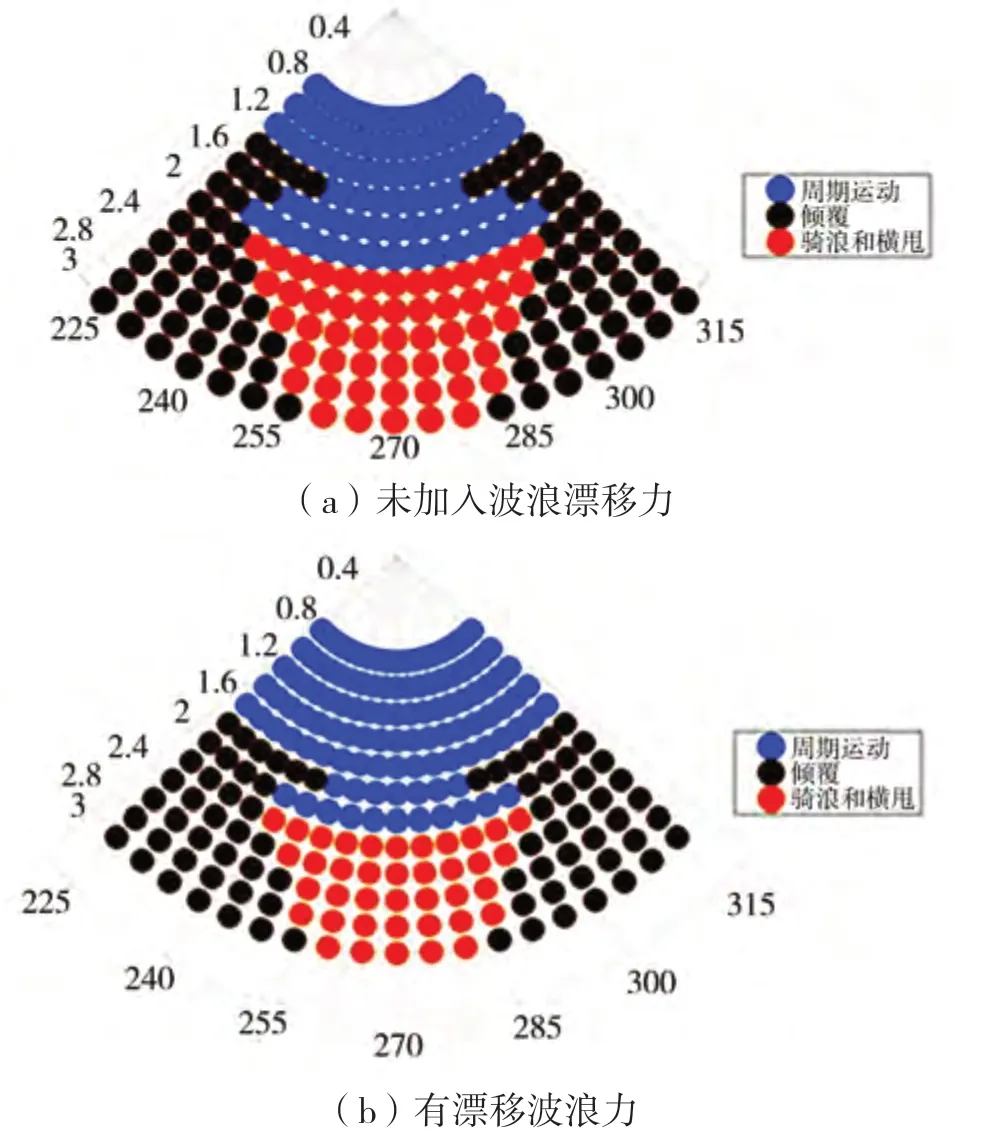
图6 渔船随航速和浪向角的运动状态变化
如图6(a)所示,船处在极坐标的原点处,船首方向与图中的270°角方向相反,即朝向90°。极轴上的数字表示的是船舶航速和船长开根号的比值,中线与不同线段的夹角就是船与浪之间的夹角,即浪向角。可以看出,周期性运动的范围主要集中在比值<2并且浪向角较小的范围内。在浪向角较小、比值稍大的区域(如1.4左右),开始出现倾覆。当比值>2之后,小浪向角范围内的周期性运动全部转变为骑浪或者横甩,分界线上的变化非常迅速。倾覆主要集中在浪向角大的部分,不过从图上的变化趋势来看,随着比值越来越高,倾覆的比例也会越来越大。
图6(b)是加入波浪漂移力的变化,周期运动的范围略有增大,比值在1.4左右的位置也没有发生倾覆。骑浪和横甩的范围因为周期性运动的范围增大而减小,倾覆的变化规律则没有变化,加入波浪漂移力后的稳定性与之前的讨论相匹配。
4.3 与实验值对比
日本船舶互保协会(Japan P & I club)对船在不同浪向角和不同船速时的骑浪横甩区域作出了完整的定义。图7为实验中定义的临界区域和危险区域。

图7 实验中定义的临界区域和危险区域
由图7可知:图中的实验浪向角与仿真的范围一样,从-45°~45°,极径上的坐标同样是航速和船长开根号的比值。图中比值在2~2.2的区间称为边际区域,表示船处于发生或不发生骑浪横甩的区域。在这个区域内,船的速度有可能发生急剧的变化,而这些变化有可能导致骑浪横甩甚至倾覆。而比值>2.4的红色区域为危险区域,表示船一定会发生骑浪和横甩。
与图6(a)进行对比,在没有考虑波浪漂移力的情况下,将图6(a)中比值从1.4~2的区域视为同时存在发生倾覆和周期运动可能性的临界区域。实验中的临界区域明显大于图6(a)中的临界区域,因此会发生骑浪横甩和倾覆的危险区域也比实验中的更大。而在图6(b)中,临界区域则是在比值为1.8~2的区域,这与实验值得出的结果更为相似。因此,在加入了波浪漂移力后,使用MMG操纵性方程模拟出的结果可以与实验值相匹配。
日本船舶互保协会基于实验值以及观察数据得出了2个用以计算临界区域和危险区域的公式,公式如下:
上面2个公式分别计算了速度的临界区域和危险区域边界,范围都是225°~315°,等价于浪向角-45°~45°。以ITTC ship A2渔船为例,船长为 34.5 m,使用公式计算出船的速度和浪向角发生骑浪横甩的临界区域和危险区域的2条边界曲线,绘制成图像,如图8所示。

图8 公式绘制的曲线与仿真对比
图8与图7不同的是,在不加入波浪漂移力的情况下,2条边界曲线与仿真的区域拟合程度更高,加入波浪漂移力的模拟却相对降低了精确度。综合实验的区块图和规范准则的2条公式可以得出结论:即使2种对比上存在着一定的不同,在大致的范围上仍然是一致的,因此,使用MMG操纵性模型仿真所计算的区域图仍具有一定的参考性。
4.4 规避方法讨论
船在航行时会遭遇多种多样的情况,本文仅针对船在骑浪横甩方面的危险性做出规避可能危险区域的模型。
船在航行时遭遇危险区域时一般选择2种方式规避:第1种是增加航速,快速驶离危险,但是危险区域的范围以及危险性都难以测定,加速所产生的危险甚至会加剧,因此,该方法只存在于理论上,难以实践;第2种就是通过减速来降低危险,穿过危险区域,此方法更安全,保险性和可行性更高。
规避骑浪横甩的模型如下:


只通过调整浪向角来规避的模型如下:



式中:角度和航速都是自变量,同时变化使规避的方式更加多样化,能够应对的情况也更多。
5 结 语
本文以四自由度操纵性方程为基础,将经验公式计算的波浪漂移力公式加入到波浪力公式中,模拟渔船在不同波长船长比下的运动规律,通过和没有加入波浪漂移力的计算结果对比,证实了考虑波浪漂移力时船舶的运动状态将会更平稳。此外,文中还研究了临界区域的预测,判断船在航行时的安全速度和稳定角度。并将仿真结果和日本船舶互保协会的实验数据和规范公式所给的界限进行对比,提出规避危险区域的指导意见。
