自卸车液压制动系统路况切换电磁阀组设计仿真研究
2022-08-18黄金荣郭瑞锋
黄金荣,周 阳,郭瑞锋
(1.陕西国防工业职业技术学院智能制造学院,陕西 西安 710300)(2.西安建筑科技大学机电工程学院,陕西 西安 710055)
非公路矿用自卸车主要应用于大型露天矿山、水利水电建设工程等领域,工作环境复杂,因此要求其制动系统必须具有稳定且精准的性能,同时要求操作轻便和有很高的可靠性,为此人们开始了对人电双控全液压制动系统的设计研究[1-2]。该系统中的路况切换阀组能够满足制动系统对多种路况下的制动控制,但是由于人工制动时制动力大小仅凭人的感觉施加,因此其精准度难以及时有效地调整。特别是对于行驶在恶劣天气中复杂路况下的自卸车,地面附着系数随时在变化,可能会由于制动力过大或不足[2],引发重大安全事故[3-4]。基于此,本文对路况切换阀组进行了优化设计,使其可以实现更快速准确的制动力电控调节,以满足多种工况下对自卸车的制动控制。
1 矿用自卸车全液压制动系统路况切换阀组制动原理
1.1 路况切换阀组在矿用自卸车全液压制动系统中的功用
自卸车的制动工况复杂,路况切换制动是一种可应用于不同路面下的制动方式,当自卸车在雨水、泥泞、冰雪等湿滑路面行驶时,由于轮胎与地面附着系数较低,一旦采取紧急制动时,往往会导致前轮先于后轮抱死,以致地面无法对前轮产生足够的摩擦力,使自卸车车轮发生滑移,丧失转向能力[5],造成安全事故。为了避免危险情况的发生,在全液压制动系统中增加路况切换阀组,如图1所示,图中18模块即为路况切换阀组,其主要功能是辅助行车制动阀在不同路况下实施可靠制动,有效减少因制动力不精准引起的安全事故。

1—变量柱塞泵;2—卸荷溢流阀;3—补油蓄能器;4.1,4.2—前、后制动蓄能器;5,7.1,7.2,7.3,7.4—梭阀;6—紧急制动电磁阀;8—液压先导换向阀;9—制动锁定电磁阀;10—减压阀;11—停车制动电磁阀;12—双路踏板阀;13.1,13.2—前、后电液比例减压阀;14.1,14.2—前、后双继动阀;15—前制动器;16—停车制动器;17—后制动器;18—路况切换阀组;19—液力缓行阀组
该路况切换阀组是在充分考虑液压制动力调节范围的基础上,利用电液比例减压阀替换直接作用式减压阀,提升了其对制动力大小的调节性能,工作原理如图2所示。该路况切换阀组由电磁换向阀、电液比例减压阀以及单向阀组成,制动时开启电磁换向阀,制动液在电液比例减压阀的控制下,可根据实际路况调节前桥制动器的制动力,以最适宜的制动力实施制动,防止车轮抱死。

1—路况切换阀组;2—前桥制动器;1.1—电磁换向阀;1.2—电液比例减压阀;1.3—单向阀
1.2 路况切换阀组工作原理简化模型
根据文献[1]电控全液压制动系统的简化模型,由路况切换阀组的工作原理可知,制动时由电液比例减压阀组件对制动液进行减压以实现制动力的精准控制,由此可以得到电控全液压制动系统中路况切换电磁阀组工作原理的简化模型,如图3所示,图中各参数的含义:Q1,Q2,Q3,Q4分别为蓄能器、先导电液比例减压阀、继动阀、电液比例减压阀的出口流量;p1,p2分别为先导比例减压阀的入口与出口压力;p3,p4分别为电液比例减压阀的入口与出口压力;x1,x2,x3,x4分别为先导电液比例减压阀阀芯、继动阀阀芯、电液比例减压阀阀芯、制动缸活塞的实时位移量;m1,m2,m3,m4分别为先导电液比例减压阀阀芯、继动阀阀芯、电液比例减压阀阀芯、制动缸活塞的质量;k1,k2,k3,k4分别为先导电液比例减压阀、继动阀、电液比例减压阀、制动缸的复位弹簧刚度;A4为制动缸活塞的有效作用面积;b4为制动缸活塞运动的黏性阻尼系数。

图3 路况切换阀组工作原理简化模型
如图3所示,当入口压力p3一定且足以导通路况切换阀组中的电液比例减压阀4时,一定的控制电流对应着一定的电液比例减压阀的阀开口度,即对应着一定大小的制动力。制动力最大值为p3,阀开口度越小,制动力也就越小。若同时控制行车制动电磁阀和路况切换电磁阀的电流,可快速得到精准的制动力及可靠的制动效果。在制动过程中行车制动电磁阀对制动力起主要作用,而路况切换阀组起快速调节作用。
2 路况切换阀组中电液比例减压阀数学模型建立

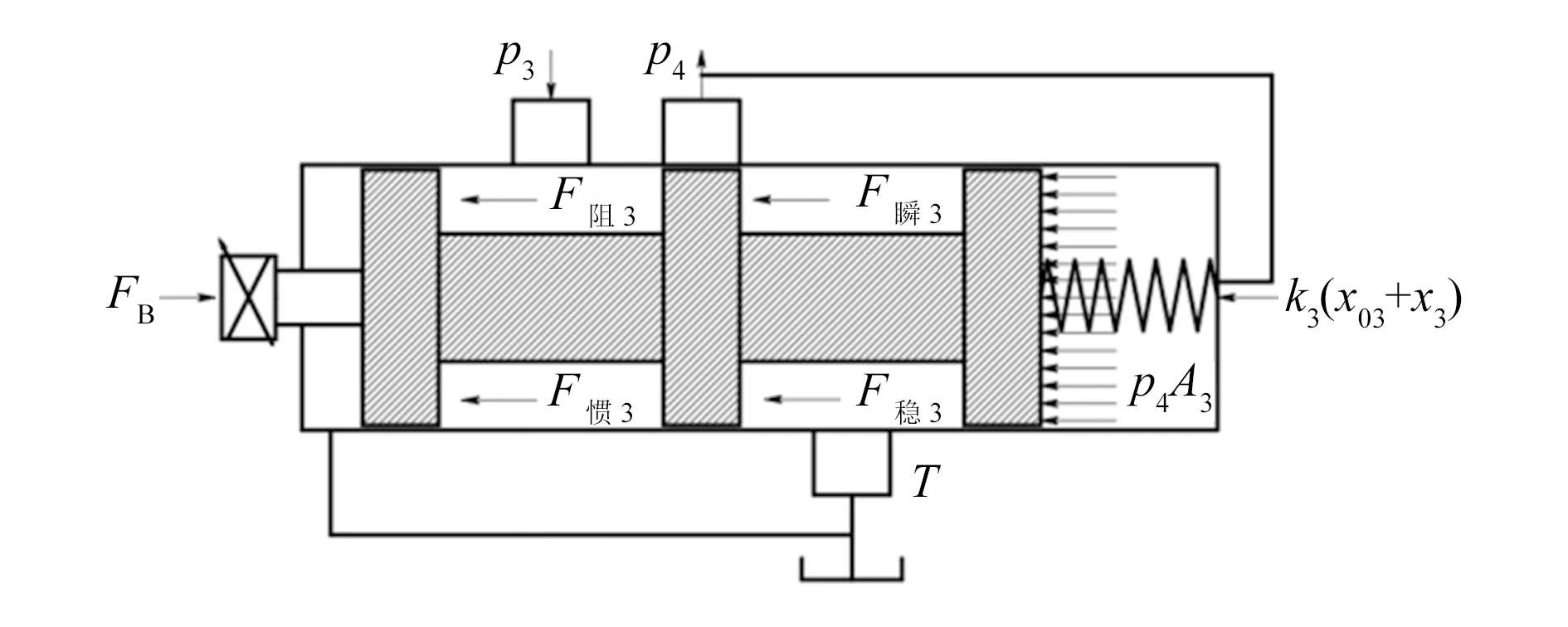
图4 电液比例减压阀阀芯受力原理图
由于制动系统为机电液系统,因此可以根据键合图理论建立制动系统的键合图模型。根据电磁感应定律,磁通链ψ与比例电磁铁输入电流i之间存在惯性关系:
i=ψ/L(x)
(1)
式中:L(x)为线圈电感。而电磁力与电磁铁之间存在容性关系:
FB=K2i+K3x3
(2)
式中:K2,K3分别为电液比例减压阀的电流-力、位移-力增益系数。故电磁铁的动作可以使用有混合场的键合图元IC[7-8]来表示。根据键合图理论,用共流结即“1-结”表达电液比例减压阀阀芯受力的势变量,用共势结即“0-结”表达电控制动系统中流变量的关联关系。
基于键合图理论与路况切换阀组的工作原理简化模型,对制动过程中间隙消除阶段的电液比例减压阀进行流量连续性分析和受力分析,得到其功率键合图模型,如图5所示,图中各参数的含义:Sf为流源;C0为线性容度参数;Cd为电液比例减压阀阀口流量系数;C3为复位弹簧容度;K1为油液体积弹性模量;TF为变换器;U3为电源电压;UL3为电液比例减压阀线圈电压;RL3为电液比例减压阀线圈电阻。

图5 路况切换电磁阀组简化模型的功率键合图
再根据功率键合图模型写出电液比例减压阀的动态方程如下:
(3)
式中:b3为电液比例减压阀阀芯的黏性阻尼系数;Bt为瞬态液动力阻尼系数;Ks1为稳态液动力刚度;ω3为电液比例减压阀阀口面积梯度;ρ为油液密度;α3为节流阀口过流面积;V为电液比例减压阀出口处受控容腔液体总体积。

(4)
对液压器件型号及液压介质选型,得到方程组中对应参数的值,见表1[9],表中d4为电液比例减压阀阀芯直径,θ为油液的出流角度,r为反馈液压力作用面半径,Cv为油液通过比例减压阀阀口的速度系数。

表1 电液比例减压阀仿真参数表
3 路况切换阀组动静态性能仿真分析
建立路况切换阀组中电液比例减压阀的动、静态数学模型进行MATLAB/Simulink仿真,如图6~图8所示。

图6 电液比例减压阀阀芯受力模型

图7 电液比例减压阀流量模型

图8 电液比例减压阀模型
Simulink仿真分析得到如图9~图11所示的电液比例减压阀的相关控制特性曲线。
由图9,10可知,当入口压力一定时,不同控制电流下的出口压力与阀芯位移不同,但均在约0.005 s时达到稳定状态。通过分析可知,路况切换阀组响应迅速,对整个系统响应时间的影响很小,满足制动可靠性要求[10]。由图11可知,电液比例减压阀出口压力随电流的增大而增加,在0~0.071 A的电流区间内存在死区,在0.1~1.0 A的电流区间内出口油液压力呈线性变化,故该路况切换阀组可对入口压力p3进行连续线性控制。

图9 出口压力动态响应曲线

图10 阀芯位移动态响应曲线

图11 出口压力静态控制特性曲线
图12是当入口压力分别为1.9×107Pa、1.7×107Pa、1.5×107Pa时,路况切换阀组出口压力的静态响应曲线,从图中可以看出,出口压力静态响应曲线的斜率不同,说明入口压力不同时出口压力有一定的波动,但对制动力的影响有限。

图12 不同入口压力下路况切换阀组出口压力静态特性曲线
4 路况切换阀组制动试验验证
在液压实验室,对先导电液比例减压阀、继动阀、电液比例减压阀、制动缸进行合理选型之后,根据路况切换阀组的工作原理,搭建了电控全液压路况切换阀组的液压测试系统,如图13所示。

1—液压泵;2—继动阀;3—电液比例减压阀;4—先导电液比例减压阀;5—制动缸
根据图1所示的制动系统原理可知,路况切换阀组与继动阀为串联关系,当制动系统处于行车制动工况时,继动阀的出口压力即为路况切换阀组的入口压力。试验中,在电液比例减压阀开口度一定的情况下,由液压泵分别对电液比例减压阀施加1.9×107Pa、1.7×107Pa、1.5×107Pa的入口压力,代表驾驶员在不同工况下的制动意图。在各制动压力下,分别对路况切换阀组液压测试系统中的电液比例减压阀的电流大小进行连续性调节,并记录其出口压力静态变化曲线,如图14所示,由图可以看出,该电控全液压路况切换阀组试验系统可实现不同入口压力下对出口压力的连续性控制,与仿真结果相符。

图14 路况切换阀组液压测试系统实验数据分析图
5 结束语
由于在恶劣天气条件下,不同路况的地面附着系数实时发生变化,矿用自卸车在行驶过程中需要不同的制动力与之匹配,为此本文优化设计了路况切换阀组,对路况切换阀组进行了性能仿真,得到了不同控制电流下出口压力的动、静态性能曲线,以及不同入口压力下的出口压力静态曲线,分析了路况切换阀组制动性能的合理性,并进行了实验验证,结果显示本文优化设计的路况切换阀组可实现更加精准快速的制动力控制。
