基于迭代学习观测器的舵机故障诊断
2022-08-17张济森李秀娟周辉
张济森,李秀娟,周辉
(南京航空航天大学自动化学院,江苏南京 210016)
1 引言
舵机是飞行器的重要组成部分,一旦发生故障,轻则造成飞行控制系统的性能下降,重则直接导致飞行器坠毁。在飞行器飞行过程中,快速而准确地估计出舵机故障信息,对维持其故障安全至关重要。舵机故障诊断的方法,一般可分为两大类:一是基于解析模型的诊断方法[1];二是不依赖于解析模型的诊断方法,又分为基于信号处理的诊断方法和基于知识的诊断方法[2]。基于信号处理的诊断方法和基于知识的诊断方法不需要对象的精确数学模型,以采集到的不同来源和不同类型的监测数据作为基底,利用各种数据挖掘技术获取其中隐含的有用信息,表征系统运行的正常模式和故障模式,进而达到检测与诊断的目的[3]。基于解析模型的诊断方法依靠系统数学模型作为参考系统模型,通过参考系统估计值和实际系统的输出得到误差,进一步分析处理误差信号中的参数,进行故障估计和诊断。
在系统发生故障时,原系统的输出和系统无故障参考模型的输出会出现明显的误差。故障估计的目标是判断系统发生故障之后,每隔一定时间区间,对系统的故障信息进行计算,得到系统故障的估计值。可以将迭代学习加入到故障估计结构之中,通过系统运行时采集到的数据来提高系统故障估计的精确性。戴喜生等[4]采用闭环P型迭代故障估计算法调节故障,是虚拟故障快速逼近真实故障从而达到故障诊断的目的。殷春武[5]针对连续线性时变系统设计了一种基于PID迭代学习算法的故障估计与控制律,采用直流电机进行仿真,验证算法可以在故障状态下估计出系统故障并跟踪期望轨迹。齐晓慧等[6]在设计迭代学习算法的故障估计器中,引入一种扩张状态观测器的方法,提高故障估计的收敛速度。陈政权等[7]针对非线性系统故障提出一种基于龙格库塔故障观测器模型的自适应迭代观测器,实现对多种故障的检测与估计。文中设计PD型迭代学习观测器对舵机故障进行自适应故障诊断,对舵机发生故障进行分类,并建立舵机故障模型,通过迭代学习算法对参数变化自适应辨识。文中给出迭代学习算法的稳定性证明,并给出观测器参数的计算方法。最后通过MATLAB进行数值仿真实验,验证设计的迭代学习观测器故障估计效果。
2 舵机系统结构与模型分析
2.1 电动舵机系统结构
电动舵机组成一般包括电动机、控制电路板、角度或转速传感器和变速齿轮组等。舵机的工作过程为控制电路板接收来自舵控板的控制信号,控制电动机按照舵控板的信号线传输的信号进行不同转向和转速的转动;电动机输出轴带动变速齿轮组转动,将动力传输到舵机的输出轴带动舵系统传动装置运动;同时舵机内部有传感器与舵机输出轴相连,在轴转动的同时带动传感器变化,传感器将输出信号到控制电路板进行位置反馈;最后控制电路板根据反馈得到位置信息再次决定电机转动的转向和转速,此工作流程达到舵控板的控制目标后停止。舵控系统示意图如图1。舵面偏转后,以实际的偏转角作为传感器反馈信号传输到飞控机,飞控机以舵反馈信号和舵指令信号的偏差作为控制决策依据,产生控制信号传输到舵机控制电路板控制舵机系统。
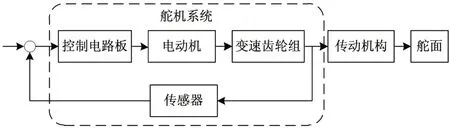
图1 舵回路结构图
2.2 电动舵机数学模型
舵机系统的动力由电动机提供,由于舵机跟踪信号进行调节时,电动机的外加电压和负载不断改变,电机处在一个逐渐变化的过程,这个过程的特性称为动态特性。在这个过程的电势方程如下:

其中ea=Ceφn为反电势,n为转速,Ra和La分别为电枢电路电阻和电感。
转矩、角速度和转动惯量的转矩方程如下:

其中Ml是负载转矩,J是转动惯量,ω=是角速度,CD是转子阻尼系数。
直流电动机的额定转速较大,但额定转矩较小。为了克服转矩限制使舵机输出轴能够驱动负载,需要减速装置。舵机中常用的减速装置为变速齿轮组,具有高精度、可逆性、低阻力和高效率的特点。
舵机输出轴角度与角速度公式如下:

其中Cw是传动比,θ为舵机输出轴转动角度,ωθ为输出轴角速度。
舵机一般使用反馈电位器实现舵机输出轴位移的反馈。反馈电位器可以通过旋钮的转动改变电位器阻值,进而改变电位器电压。由于电位器阻值分布均匀,所以电压应与舵机输出轴转角成正比。
电位器电压与舵机转角的公式如下

根据舵机动态方程建立状态空间模型对舵机进行数学模型描述

其中x=[I,ω,θ]T,分别为绕组电流、转子转速和电机输出轴偏角;u为电机输入电压;y为舵机输出偏角。电机输入电压由以舵机输出偏角为反馈的PID 控制器控制。系统矩阵(A,B)可控,(A,C)可观。
2.3 舵机故障数学模型
对舵机故障诊断的要求为:在飞行过程中检测飞控系统状态是否正常;若由于舵机系统导致飞控系统状态异常,能够进行判断;对舵机系统故障类型进行判断并进一步判断故障影响的程度。
常见的舵机故障有以下几类:
卡死故障。舵机卡死故障指舵机输出轴固定在某个位置,无法响应舵控指令,无法跟踪舵控指令变化,舵机输出力矩为固定值。饱和故障为舵机卡死在舵机输出极限位置的特殊情况。舵机卡死表述为:

其中,θ 为舵机输出角度,C为常数,取值范围为舵机输出范围。
控制效能损失故障。舵机控制效能损失故障指舵机实际输出无法到达舵控指令目标输出,舵机的输出存在比例缺失。舵机控制效能损失故障表述为:

其中k为比例系数,k[0,1)。
松浮故障。舵机松浮故障指舵机无法响应舵控指令,处于自由移动状态,输出轴无法提供操纵力矩,舵机轴转角受外力影响而改变。舵机松浮故障表述为:

其中V是变量,受舵机系统外力影响而改变。
根据舵机故障表述建立舵机故障模型

将常见故障分为两类,一是完全失效故障,二是部分失效故障,其中完全失效故障包括卡死和松浮,部分失效故障为控制效能损失故障,则舵机故障模型如下所述:

3 故障诊断系统设计
3.1 迭代学习观测器结构
计故障诊断系统重复计算k次,在计算k+1次时可以利用前k次时计算估计的数据。如果合理利用这些数据,就可以提高重复的故障估计精确度,并增加故障估计的速度。理想情况下,当k取到无限大的时候,原系统的输出和参考模型的输出之间的误差将会减小到零,故障估计结构做到对故障的精确估计。但是在实际的运用中,由于故障估计速度的要求、计算机计算性能的限制和外界干扰等影响,提高了对迭代学习算法的要求。一个好的迭代学习故障估计结构可以确保故障诊断系统在最初的几次迭代中获得良好的故障估计值;可以在k→∞时确保误差系统收敛;可以在干扰或噪声影响下保持稳定性和收敛性。迭代学习故障估计框图如图2所示。

图2 迭代学习故障估计框图
迭代学习观测器进行故障估计的流程主要包括:
(1)设置迭代学习观测器初值和迭代最大次数;(2)检测系统运行时输出值和参考系统输出误差,若误差范数超过设定阈值,则启动迭代学习观测器进行故障估计;(3)将每次迭代得到的故障估计值输入参考系统并存入记忆存储器,计算出新的误差迭代值;(4)若迭代得出的误差范数大于设置阈值或未达到迭代最大次数,则进行下一次迭代周期;(5)若进行迭代过程中误差范数小于设置阈值或达到迭代最大次数,则退出迭代过程并输出迭代观测器计算的故障估计值。
3.2 迭代学习观测器设计
设计迭代学习观测器来估计状态向量和估计故障信号,其形式如下:

其中t[0,T],是连续时间变量;为第k次迭代的状态变量观测值为输出估计值为故障估计值。
系统输出误差如下:

设计故障迭代学习律如下:

对设计的迭代学习观测器的可行解进行求解,满足收敛性的充分条件如下:
存在标量γ1>0,γ2>0,如果存在一个正定对称矩阵P并有
其中
则可使得状态估计误差和故障估计误差收敛。
引理[8]:对于任意正数ε和对称正定矩阵P,有以下不等式成立

证明:对于误差系统(13),存在对称正定矩阵P,则误差系统收敛的充分条件是满足李雅普诺夫第二稳定判据,即对于李雅普诺夫方程

存在

则可使迭代学习观测器收敛。
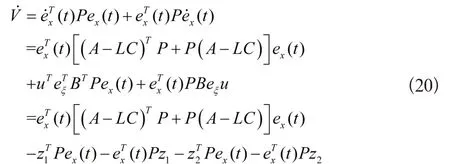
其中

根据引理,存在γ1>0,γ2>0使

其中

若式(15)成立则状态估计误差和故障估计误差收敛。
4 仿真验证
舵机数学模型的状态空间方程表示为
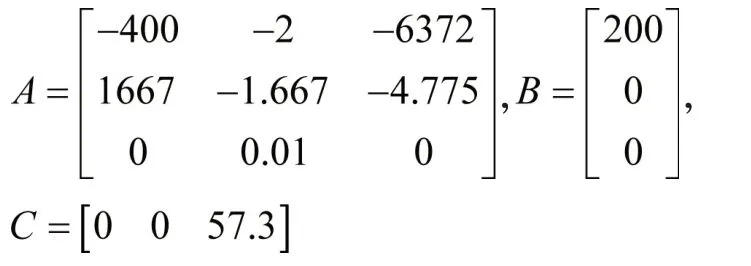
其中状态向量包括x=[I,ω,θ]T,分别为绕组电流、转子转速和电机输出轴偏角;u为电机输入电压;y为舵机输出偏角。电机输入电压由以舵机输出偏角为反馈的PID 控制器控制。
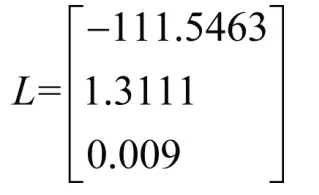
通过通过求解出观测器参数
1)完全失效故障验证
设置15 秒之前无故障,15 秒时注入完全失效故障。舵机输出及其与参考模型的误差如图3所示。
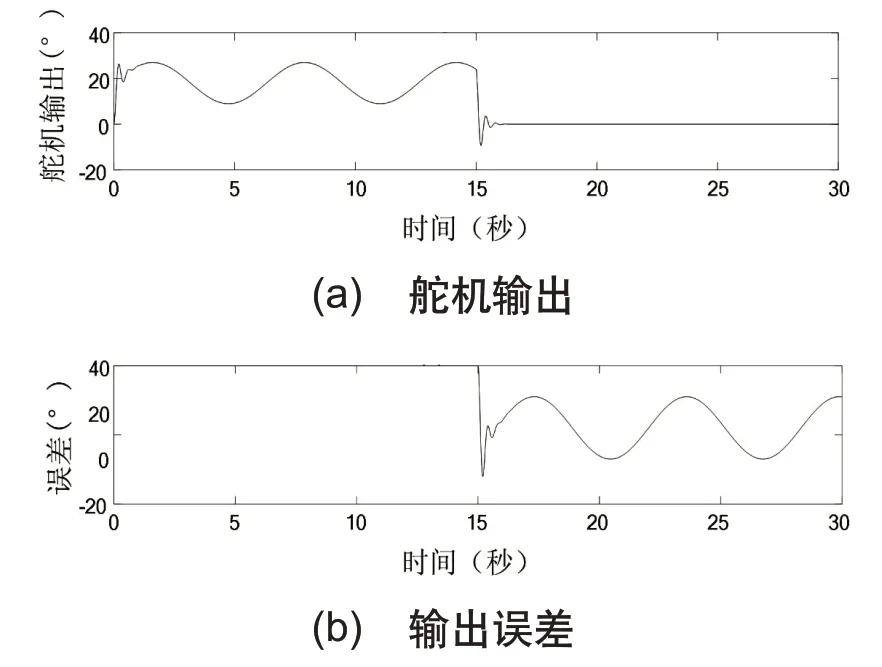
图3 完全失效舵机输出
启用迭代学习观测器后,输出误差和故障估计如图4所示,分别显示迭代学习10次输出误差和故障估计值,可以看出在第10次迭代学习后,故障估计已经很精确。
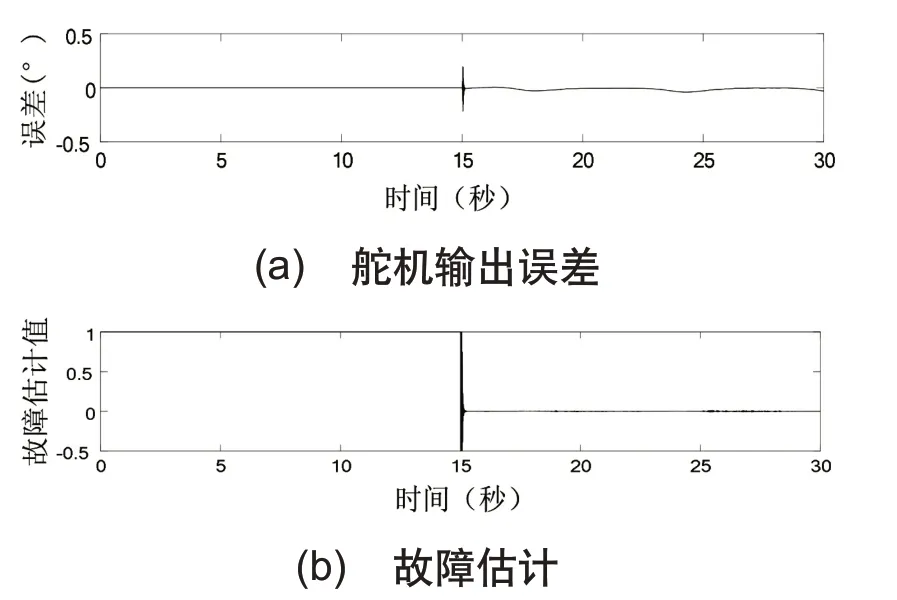
图4 迭代学习观测器诊断结果
图5为输出误差随迭代次数增加变化示意图,从图5中可以看出输出误差随迭代次数增加逐渐减小,在第8次迭代过后,故障估计误差达到最小值。

图5 观测器迭代误差变化趋势
2)部分失效故障验证
设置15秒之前无故障,15秒时注入部分失效故障,进行两组实验进行验证,失效比例分别为20%和80%。舵机输出及其与参考模型的误差如图6、图7所示。
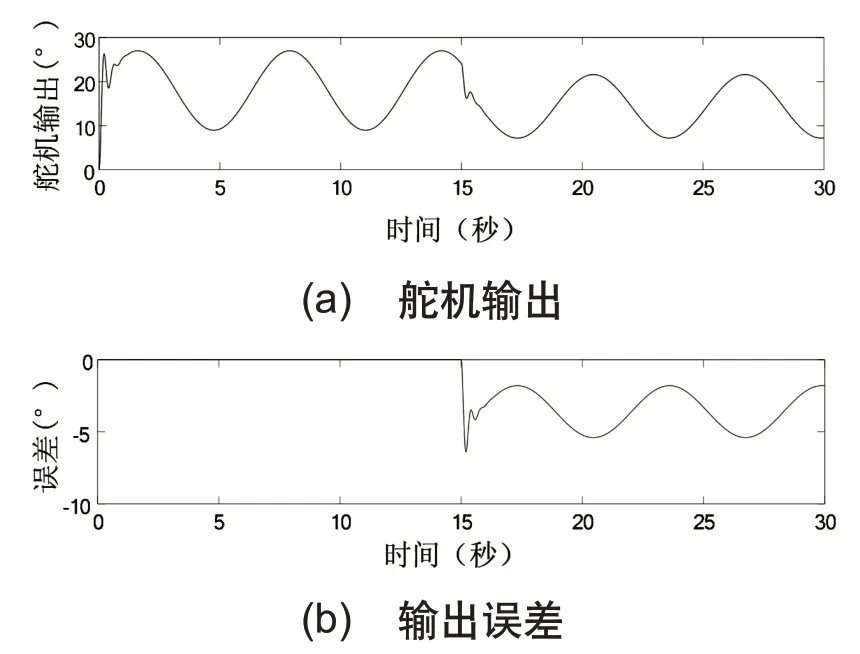
图6 20%失效舵机输出

图7 80%失效舵机输出
启用迭代学习观测器后,20%失效舵机输出误差、故障估计和迭代误差如图8所示,分别显示迭代学习10次输出误差和故障估计值,可以看出在第10次迭代学习后,故障估计已经很精确。输出误差随迭代次数增加逐渐减小,在第8次迭代过后,故障估计误差达到最小值。
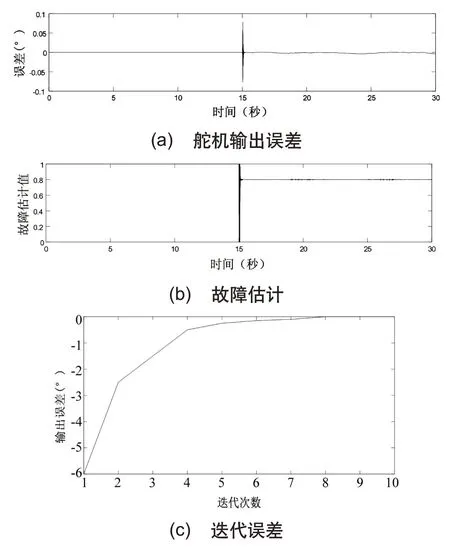
图8 20%失效迭代观测器故障诊断结果
图9分别显示迭代学习10次输出误差和故障估计值,可以看出在第10次迭代学习后,故障估计已经很精确。从图9中可以看出输出误差随迭代次数增加逐渐减小,在第8次迭代过后,故障估计误差达到最小值。
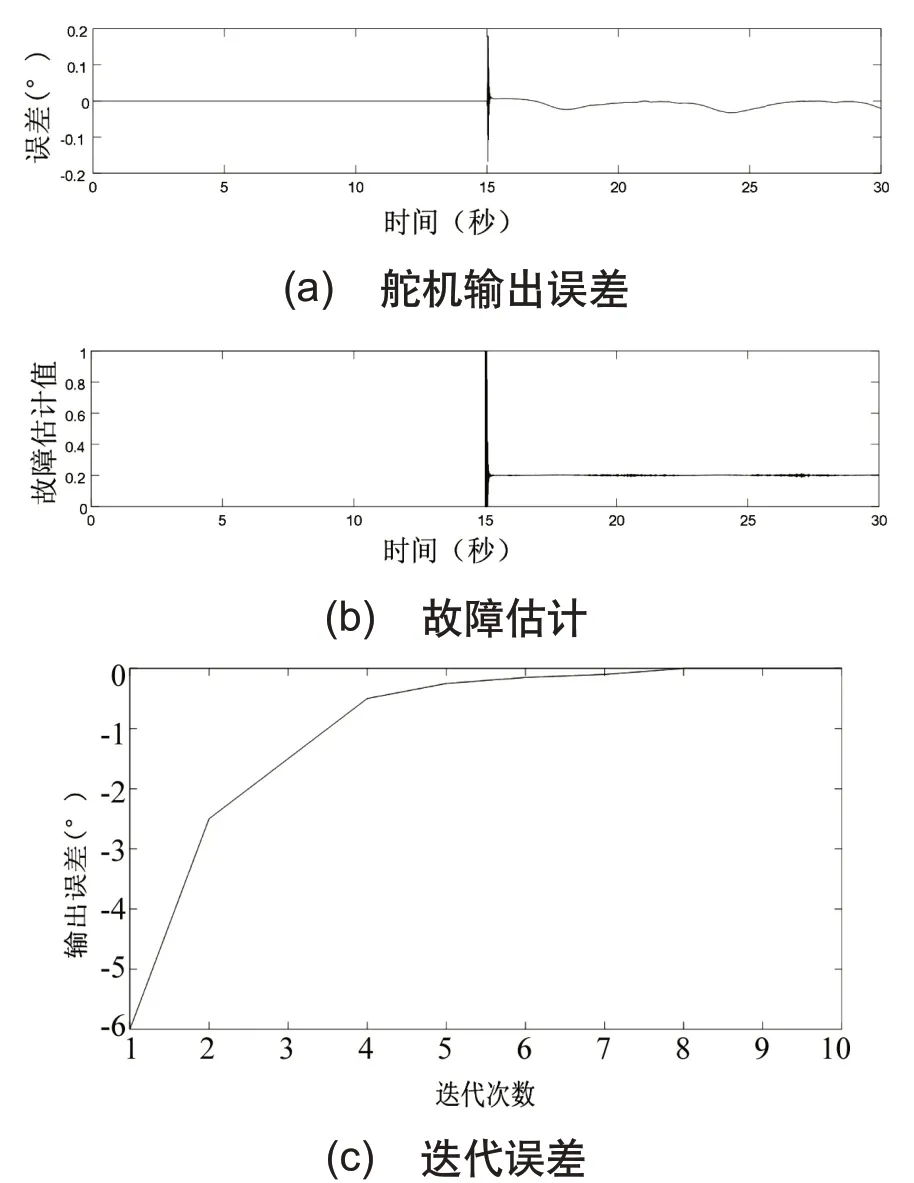
图9 80%失效迭代观测器故障诊断结果
5 结束语
针对含有故障的舵机系统,将比例微分型迭代学习算法应用到故障诊断中,该算法可以实现对故障信号的精确估计,同时根据建立故障模型判断故障类型。比例微分型迭代算法可以充分利用系统已存的有效信息,取得比P型迭代学习算法较快的收敛速度并减小随迭代次数增加引起的动态误差。
