相位锁定指示值与GNSS观测值质量分析
2022-08-15戴吾蛟余文坤
彭 会,戴吾蛟,余文坤,潘 林,郑 彬
相位锁定指示值与GNSS观测值质量分析
彭 会1,戴吾蛟1,余文坤1,潘 林1,郑 彬2
(1. 中南大学 地球科学与信息物理学院,长沙 410083;2.湖南北云科技有限公司,长沙 410083)

相位锁定指示值;全球卫星导航系统;质量分析;随机模型
0 引言

1 相位锁定指示值
图1 接收机跟踪环路




图2 信号I和Q的表达


2 RPLD与GNSS观测值质量分析
2.1 观测环境与数据采集

图3 观测环境

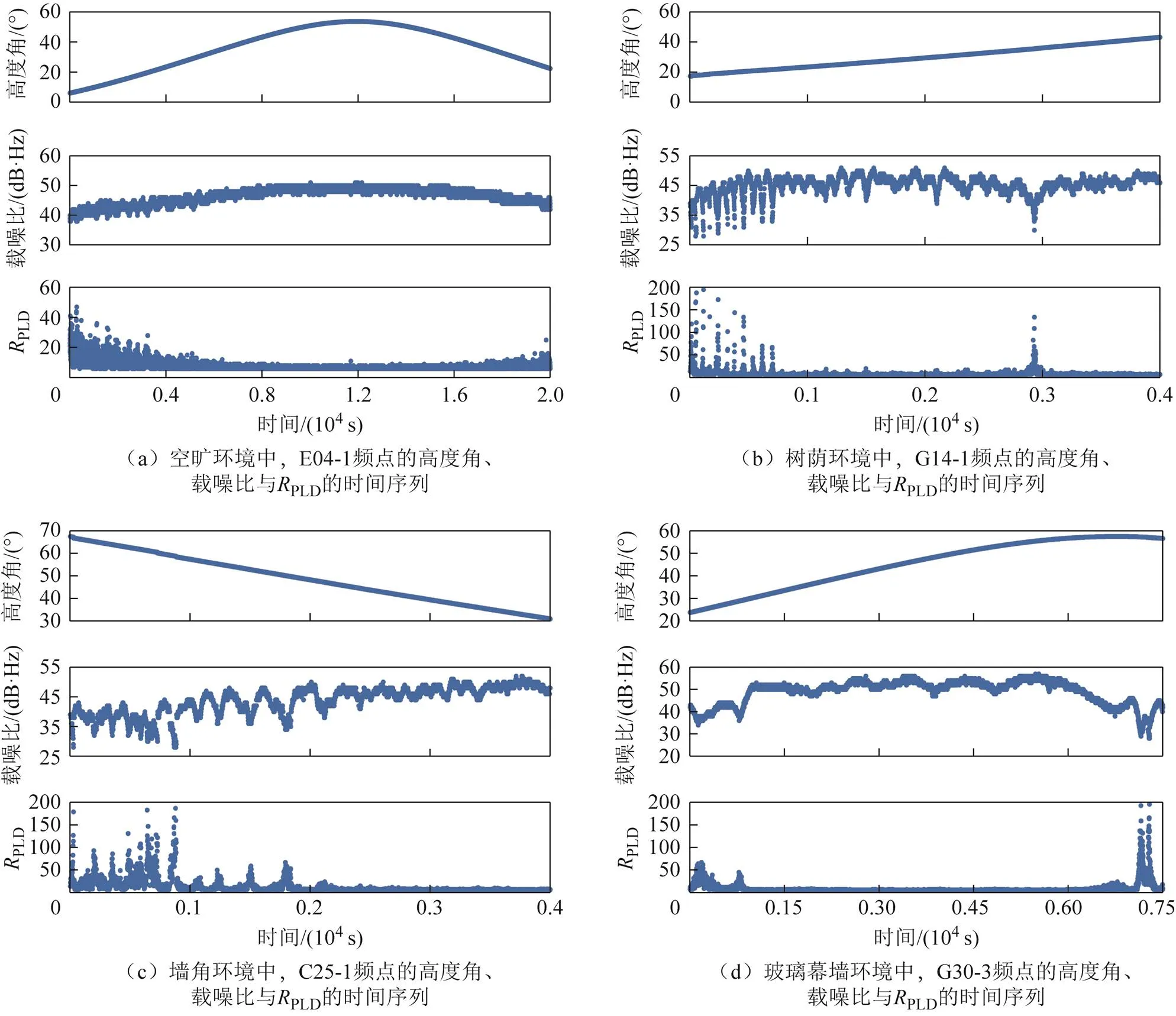
图4 不同环境中高度角、载噪比与的时间序列

图5 不同环境、不同系统各颗卫星不同频率的载噪比与相关系数

式中:Slp为周跳发生概率;Slp为周跳历元数;obs为数据总历元数。
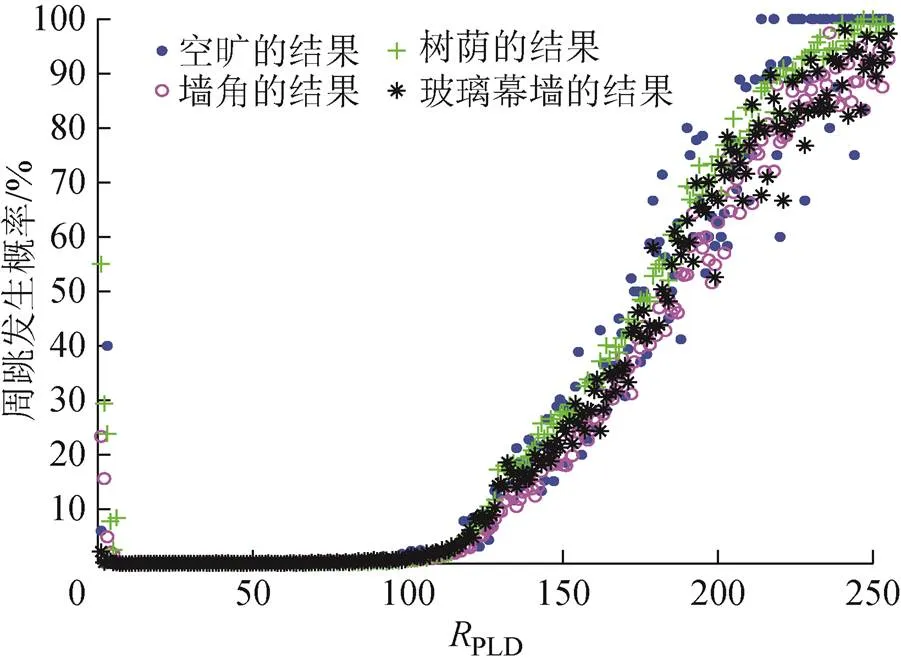
图6 与周跳发生概率关系
表1 不同的对应的周跳发生概率
2.3.2 载噪比与周跳相关性分析
图7展示了空旷、树荫、墙角和玻璃幕墙环境中,不同载噪比对应的周跳发生概率。由图7可知,不同环境中,相同载噪比对应的周跳发生概率不完全一致。在4个环境中,当载噪比从1 dB·Hz增加至32 dB·Hz时,周跳发生概率未随载噪比增加而下降,而是频繁地上下波动。当载噪比大于32 dB·Hz后,周跳发生概率趋于稳定,其值趋近于零。但是,在树荫、墙角和玻璃幕墙环境中,随着载噪比增大至55 dB·Hz左右时,周跳发生概率突然增大,而且一直保持着较高频率,这可能是由于多径信号或衍射信号叠加导致载噪比大于正常值。由此可见,复杂环境中载噪比大小无法完全反映周跳发生概率。
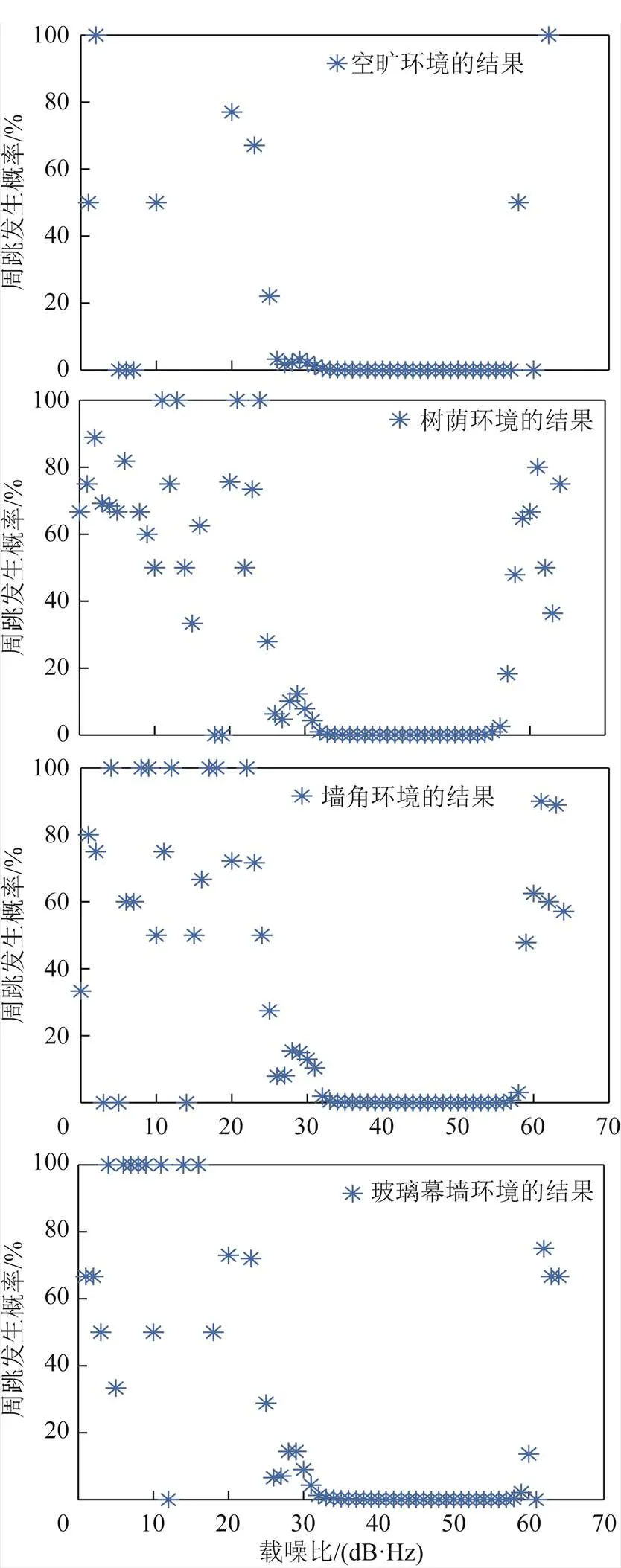
图7 不同载噪比对应的周跳发生概率
2.3.3 高度角与周跳相关性分析
图8展示了空旷、树荫、墙角和玻璃幕墙4个环境中,不同高度角对应的周跳发生概率。由图8可知,在空旷环境中,随着高度角升高,周跳发生概率随之下降并逐渐趋于稳定。在树荫、墙角和玻璃幕墙环境中,随着高度角升高,周跳发生概率随之降低,但高度角上升过程中,周跳发生概率频繁波动。在树荫和墙角环境中,当高度角大于75°后,周跳发生概率显著增大。由上述分析可知,高度角与周跳发生概率的相关性也明显受到环境因素影响。
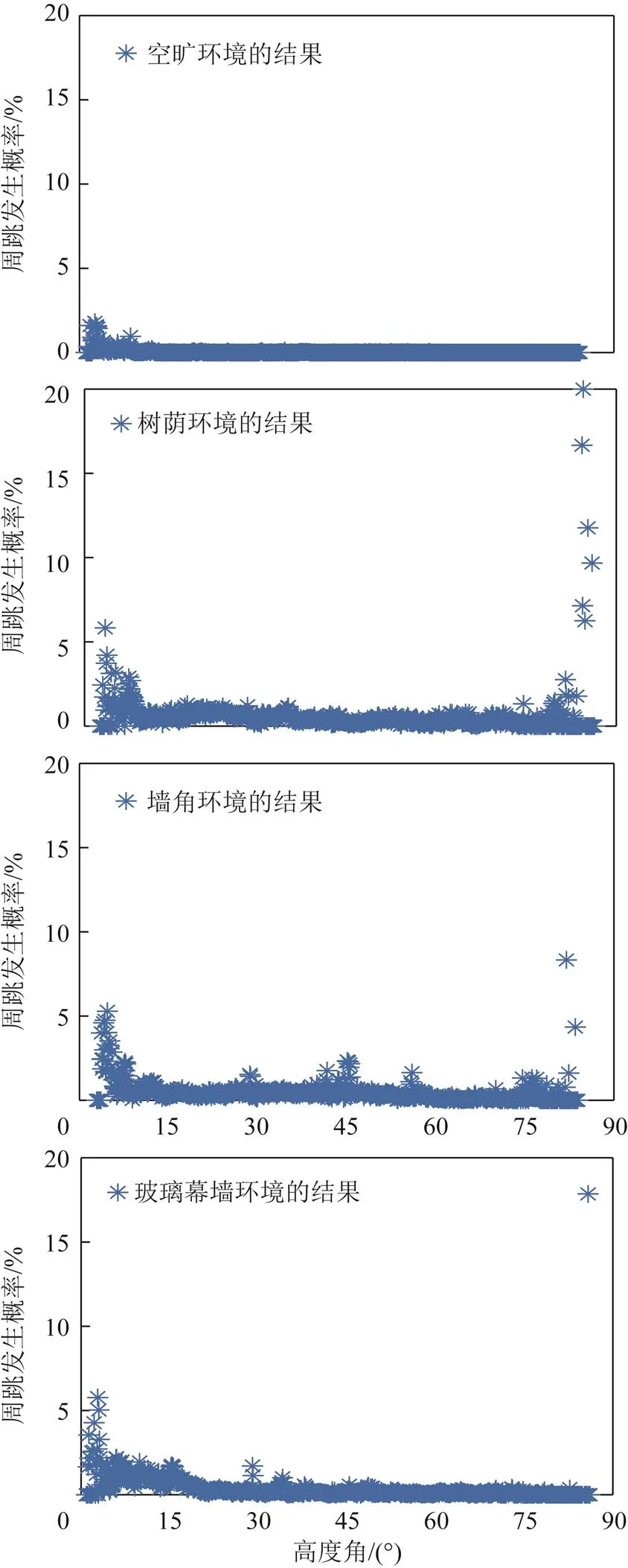
图8 不同高度角对应的周跳发生概率

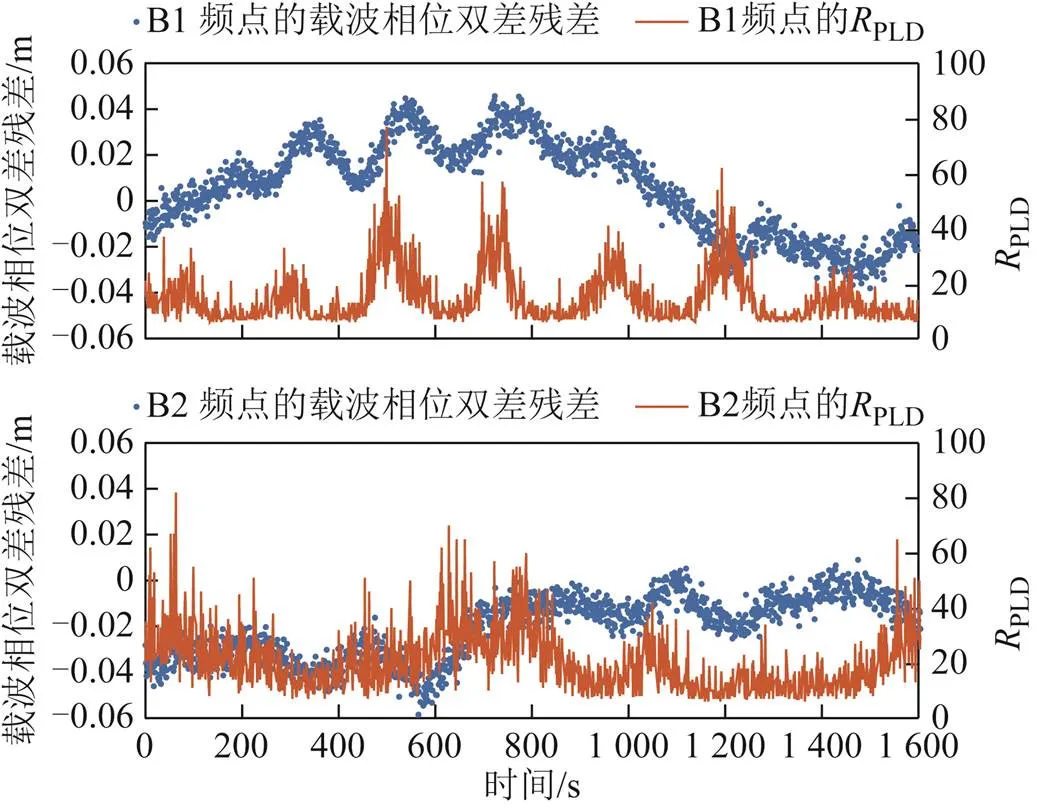
图9 C16的载波相位双差残差和时间序列图
2.4.2 载噪比与载波相位双差残差相关性分析
图10为C16的载波相位双差残差和载噪比时间序列图,从图9可以看出,B1和B2频点的载噪比和载波相位双差残差的总体变化趋势和周期性变化部分都高度一致,但载噪比的周期性变化部分和载波相位双差残差周期性变化部分之间存在一定的时延。这是因为载噪比估计的平滑周期一般较长,可能用1 s的数据来平滑。
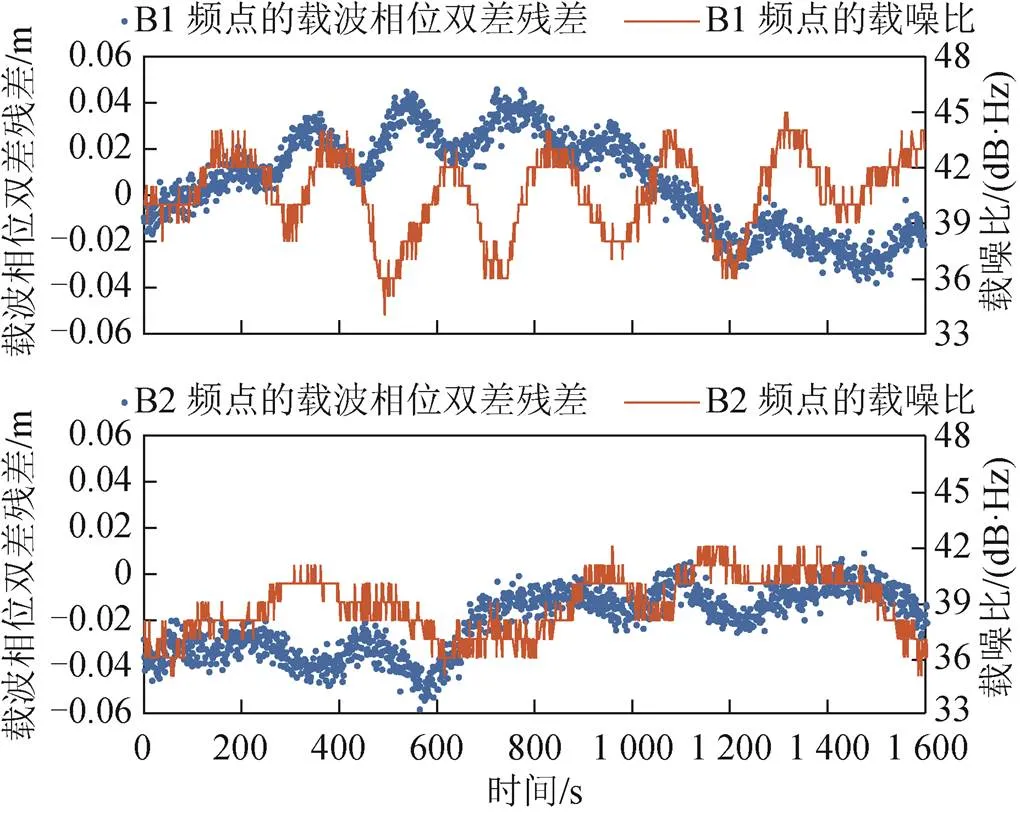
图10 C16的载波相位双差残差和载噪比时间序列图
2.4.3 高度角与载波相位双差残差相关性分析
图11为C16的载波相位双差残差和高度角时间序列图,由图11可知,本次观测时段内,BDS 16号星高度角逐步下降,但是,载波相位双差残差未随之逐步下降,而是频繁跳变。由此可见,高度角与载波相位双差残差间无明显相关性。
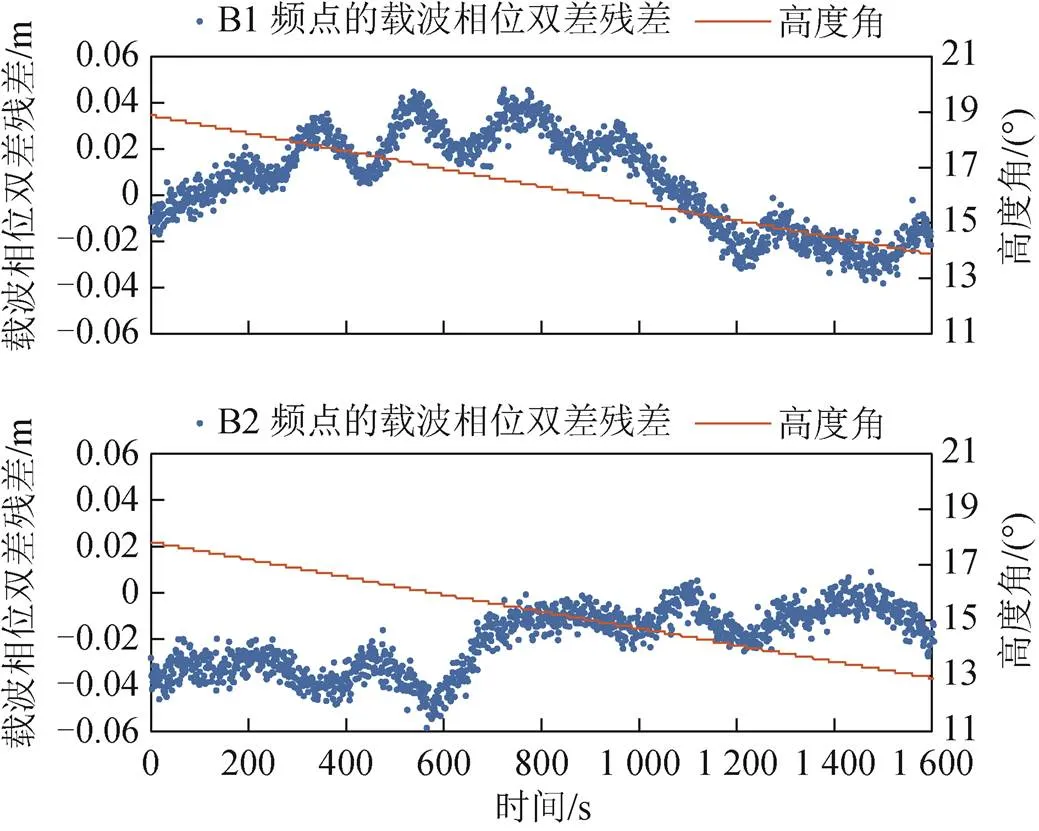
图11 C16的载波相位双差残差和高度角时间序列图
3 顾及RPLD的高度角指数函数随机模型


表2 指数函数模型相关系数的参考值
为评估该模型的性能,本文进行了动态和静态试验。在动态试验时,将测试设备固定在汽车内,将GNSS接收机天线安装在汽车车顶,汽车在高楼峡谷和林荫道路中行驶;在静态试验时,则分别将GNSS接收机天线置于墙角和树荫环境中。动/静态试验的参考站均位于空旷的楼顶。本次试验情况和异常观测值占所有观测值的百分比如表3所示。
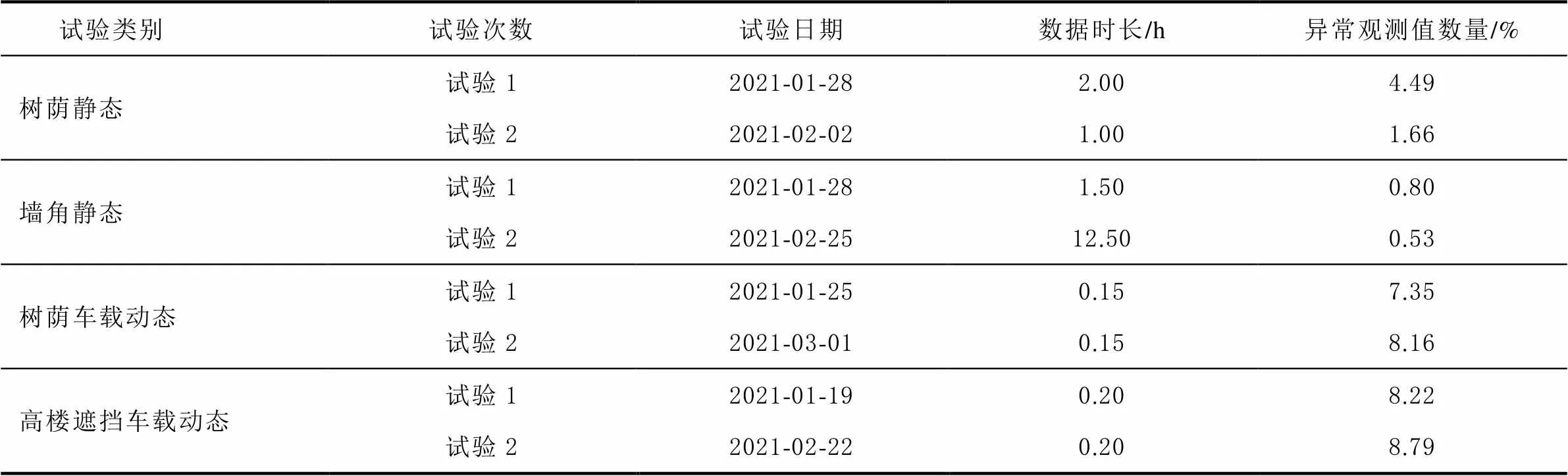
表3 试验情况和异常观测值数量汇总
表4 使用前后的静态相对定位误差统计结果
表5 使用前后的动态相对定位误差统计结果
4 结束语
[1] CHEN X, LENZINI G, MARTINS M, et al. A trust framework for evaluating GNSS signal integrity[C]//The Institute of Electrical and Electronic Engineers (IEEE). Proceedings of Position Location and Navigation Symposium. Palms Springs: IEEE, 2013: 179-192[2021-09-26].
[2] ZHANG X, WU M, LIU W, et al. Initial assessment of the COMPASS/BeiDou-3: new-generation navigation signals[J]. Journal of Geodesy, 2017, 91(10): 1225-1240.
[3] HE Y. Quality analysis of signal for BDS-3 basic system[C]//Academic Exchange Center of China Satellite Navigation Office (CSNO). Proceedings of the 11th China Satellite Navigation Conference Symposium. Beijing: China Satellite Navigation Office, 2020: 506-516[2021-09-26].
[4] EUELER H J, Goad C C. On optimal filtering of GPS dual frequency observations without using orbit information[J]. Bulletin Géodésique, 1991, 65(2): 130-143.
[5] HARTINGER H, BRUNNER F K. Variances of GPS phase observations: the SIGMA-model[J]. GPS Solutions, 1999, 2(4): 35-43.
[6] BRUNNER F K, HARTINGER H, TROYER L. GPS signal diffraction modelling: the stochastic SIGMA-Δ model[J]. Journal of Geodesy, 1999, 73(5): 259-267.
[7] 张小红, 丁乐乐. 北斗二代观测值质量分析及随机模型精化[J]. 武汉大学学报(信息科学版), 2013, 38(7): 832-835.
[8] 戴吾蛟, 丁晓利, 朱建军. 基于观测值质量指标的GPS观测量随机模型分析[J]. 武汉大学学报(信息科学版), 2008, 33(7): 718-722.
[9] 杨汀, 杜久升, 陈宜金. 基于卫星高度角模型的GNSS双差观测量方差估计[J]. 河南理工大学学报(自然科学版), 2017, 36(2): 63-67.
[10] JAMES J, SPILKER JR, AXELRAD P, et al. Global positioning system: theory and applications, volume I[M].Reston:American Institute of Aeronautics and Astronautics, 1996: 393-394.
[11] 谢钢. GPS原理与接收机设计[M]. 北京: 电子工业出版社, 2017: 283.
[12] HAN S. Carrier phase-based long-range GPS kinematic positioning[D]. Sydney: University of New South Wales, 1997.
Quality analysis of GNSS observations and phase lock detector
PENG Hui1, DAI Wujiao1, YU Wenkun1, PAN Lin1, ZHENG Bin2
(1. School of Geosciences and Info-physics, Central South University, Changsha 410083, China 2. Hunan Bynav Technology Co. Ltd, Changsha 410083, China)
phase lock detector; global navigation satellite system; quality analysis; stochastic model
P228
A
2095-4999(2022)04-0115-10
彭会,戴吾蛟,余文坤,等. 相位锁定指示值与GNSS观测值质量分析[J]. 导航定位学报, 2022, 10(4): 115-123.(PENG Hui, DAI Wujiao, YU Wenkun, et al. Quality analysis of GNSS observations and phase lock detector[J]. Journal of Navigation and Positioning, 2022, 10(4): 115-123.)DOI:10.16547/j.cnki.10-1096.20220416.
2021-10-06
国家自然科学基金项目(41904030);湖南省自然资源厅科技项目经费资助项目(2021-24);中南大学研究生自由探索项目(2020zzts694)。
彭会(1997—),女,湖南常德人,硕士研究生,研究方向为导航定位与空间数据更新。
戴吾蛟(1977—),男,江西泰和人,博士,教授,研究方向为GNSS变形监测与变形分析。
