光子计数成像系统的自适应累积时间扫描方法*
2022-08-12朱文华汪书潮王凯迪陈松懋马彩文苏秀琴
朱文华 汪书潮 王凯迪 陈松懋 马彩文 苏秀琴
1) (中国科学院西安光学精密机械研究所,中国科学院空间精密测量技术重点实验室,西安 710119)
2) (中国科学院大学,北京 100049)
3) (青岛海洋科学与技术试点国家实验室,青岛 266237)
得益于单光子探测器的超高灵敏度,光子计数成像系统近年来成为极弱光探测成像领域的研究热点.基于单点扫描的光子计数成像系统,以光子累积的方式获取大量返回光子事件后重建目标图像.然而,单像素探测时间固定导致的光子事件累积冗余或累积不足的问题,限制了系统的成像效率.本文提出了一种基于自动选取单像素最佳累积时间的时间自适应扫描方法,并分别进行了单点测距和扫描成像实验.结果表明,本文提出的方法在重建质量接近的深度图像(64 × 88)时的数据总获取时间相比单像素固定累积时间的扫描方法降低了一个数量级,极大地提高了扫描数据获取的效率,为光子计数成像系统快速成像提供了新思路.
1 引言
光子计数成像系统是激光雷达的前沿研究领域,它结合了单光子探测器的极高灵敏度[1]与时间相关单光子计数(time-correlated single photon counting,TCSPC)技术的超高时间分辨力[2].其可将探测灵敏度提升至单个光子量级,通过计算成像的方法来还原目标的三维信息,极大地提高了成像系统的极弱光探测能力.因此,被广泛运用于超远距离测量[3,4]、非视域成像[5−7]、军事目标探测[8]等领域.
近年来,该领域的研究取得了长足的进步.英国赫瑞瓦特大学的Buller 研究组[9−13]提出了多种应用于光子计数成像系统的数据处理与三维重建方法,2021 年又提出了一种分层贝叶斯算法,可在高噪声环境下对多光谱光子计数系统数据进行重建[14].中国科学技术大学徐飞虎研究团队[15−17]一直致力于光子计数成像系统的超远距离探测研究,目前该研究组通过高效的光学系统与新型噪声抑制技术已经实现 200 km 的三维成像[4],这也是目前单光子探测的国际最远距离.中国科学院西安光学精密机械研究所陈松懋等[18,19]基于多尺度分析与非局部重建的方法,大幅提高了光子数匮乏条件下的三维重建质量,并通过非均匀采样等方法加快了重建速率;汪书潮等[20]提出了弹性变分模态提取算法,有效地提高了算法的去噪能力和特征提取的性能.阿卜杜拉国王科技大学针对图像传感器像素较低的问题,提出了一种光学编码的相机设计,支持从低像素的原始测量数据中重建高分辨率图像[21].
上述的研究工作更多的集中在后期的信号噪声抑制来提高图像重建质量,或是通过图像重建算法在已获取数据中提高图像重建速率与分辨率,在信号获取速率上的研究工作较少.针对这一问题华东师范大学曾和平、吴光等为实现单点探测器的高速成像在相关研究[22−24]基础上提出了一种大规模的多光束光子计数成像系统,利用光纤阵列将单点探测器组合成一个面阵探测单元,为高速、高分辨率、低能耗推扫式机载或星载激光高度计提供了解决方案[25,26].虽然提高了数据获取速率,但是该方法建立在拥有多个单点单光子探测器的基础上,其成本较高.中国科学院光电技术研究所华康健等[27]提出了基于双单光子雪崩二极管SPAD 的低累加时间水下光子计数成像方法,但此方法中的光纤分束器会降低回波强度,不适应极弱回波信号的场景.
目前单点扫描光子计数成像系统的扫描方法固定每个扫描点的累积时间,在累积时间选择过短时,导致强反射点可获取数据,弱反射点处容易出现空值,在后端数据处理时难以重建图像;在累积时间选择过长时,在强反射点处耗费较多不必要的时间,影响数据采集速率.针对上述情况,本文提出了一种不同像素点不同累积时间的扫描方法,称为自适应累积时间扫描方法(adaptive acquisition time scanning method,AATSM).实验表明,AA TSM 可自动选取单像素的累积时间,避免数据累积冗余或累积不足,提升数据获取效率,提高光子计数成像系统的快速成像能力.
2 自适应累积时间扫描方法
激光回波信号和背景噪声的光子响应,在飞行时间上具有不同的分布规律.背景噪声光子的飞行时间在时间轴上呈现随机的分布特点;而回波信号光子的飞行时间在时间轴上则集中分布,且主要集中在激光脉冲的脉宽时间tp范围内,更准确点是探测器响应回波信号的上升沿,信号会集中在tp/2 范围内.如图1 所示,其中tgate表示系统的门控时间,tbin为TCSPC 器件的分辨率,m表示该时间位于时间刻度上第m个tbin,也代表着记录的时间,tp表示激光器的脉宽.t1,t2,t4表示由信号光返回TCSPC 器件记录的时间,其相对集中;t3,t5表示由噪声导致TCSPC 器件记录的时间,其分布相对随机.

图1 AATSM 相关响应事件Fig.1.Related response events of AATSM.
根据激光回波信号与噪声信号的分布特性不同,可以定义相关响应:在某个扫描点处,每个响应事件对应一个时间,共同构成一个飞行时间集合{t1,t2,···,tn},将其按升序排序构成集合{T1,T2,···,Tn},计算相邻响应事件之间的时间差:

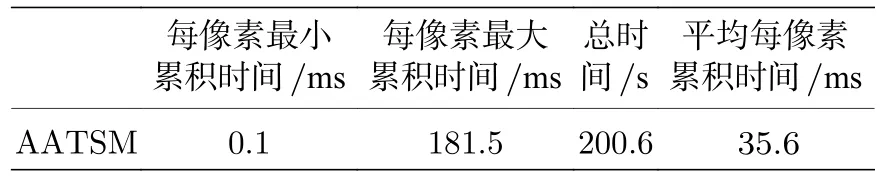
当|Tn −Tn−1| 当TCSPC 器件记录响应事件达到初始累积光子数N0后,每记录一个响应事件就沿着时间轴寻找相关响应的事件n,选择一个阈值K,当相关响应数nK时,结束该扫描点的探测.针对某些特殊位置回波信号极弱,始终不能满足相关响应条件时可以设定单像素的最大累积时间t0,当单点累积时间达到t0时,同样进入下一个像素探测.整个扫描流程如图2 所示,在当前扫描点扫描累积的时间满足相关响应K或达到设定值t0,即进入下一扫描点.同时该扫描点的飞行时间由峰值位置决定或相关响应时间的均值决定: 图2 AATSM 扫描流程图Fig.2.Schematic diagram of AATSM. 式中,tf表示满足相关响应时该扫描点的目标回波信号飞行时间,ti表示相关响应事件n中的每个响应事件的飞行时间. 光子计数成像系统原理图如图3 所示,控制单元控制脉冲激光器发射激光脉冲,通过发射光学系统、扫描光学系统后照射到探测目标,经待测目标物体漫反射后,被接收光学系统接收并耦合至盖革雪崩光电二极管(Geiger mode-avalanche photodiode,GM-APD)探测器,GM-APD 将光信号转换为电信号后输入TCSPC 器件.控制单元将激光输出的本征信号与回波信号进行相关解算,即可计算出回波信号的飞行时间,同时控制器控制扫描系统进入下一扫描点.实验系统图如图4 所示,发射信号由PicoQuant LDH800-D 驱动器驱动LDHD-C-850 激光头产生 850 nm 脉冲光,实验中出射激光重频为1 MHz,经耦合输出后功率为11 µW;GM-APD 为EXCELITAS 公司的SPCM-AQRH-16,其量子效率为50%@850 nm;TCSPC 计数器为PicoQuant PicoHarp 300,最高时间分辨率达到4 ps;控制单元为Dell precision tower 计算机,包括 Intel(R) Xeon(R) E5-2620 CPU 和32 GB 2400 MHz DDR4 内存. 图3 光子计数成像系统原理图Fig.3.Schematic of photon counting imaging system. 图4 实验系统Fig.4.Experimental system. 实验中采用在同一位置用不同材质的探测目标来验证实际扫描过程中因目标表面上不同区域反射特性不同导致数据的获取时间不同.不同材质目标分别如图5 所示,图5(b)材质为白纸(白硬纸板),图5(c)材质为硅胶(硅胶卡套纯黑色部分),图5(d)材质为光盘(CD 光盘亮面),图5(e)材质为金属(大恒光电GCM-PS0730M 防护挡板黑色面),利用左侧的夹持器件(图5(a))分别固定这些目标进行单点测距实验. 图5 不同探测目标 (a) 夹持器件;(b) 白纸;(c) 硅胶;(d) 光盘;(e) 金属Fig.5.Different detected targets:(a) Clamping fixture;(b) white paper;(c) silicone;(d) CD;(e) metal. 单点测距实验先进行固定累积时间探测,选择单像素累积时间为10 s,同时将该次测量数据作为待测目标的距离参考值.其次利用单点AATSM获取数据,其中初始值N0100,t010 s,相关响应阈值分别选取K10与K100 进行实验.图6 显示的是4 个探测目标的TCSPC 的光子计数峰值图,表1 显示的是测量距离与单点AATSM所需要的单像素累积时间tAATSM,表中R10 s计算式为 图6 不同探测目标的TCSPC 光子计数图 (a) 白纸;(b) 硅胶;(c) 光盘;(d) 金属Fig.6.The TCSPC photon counting of different detected targets:(a) White paper;(b) silicone;(c) CD;(d) metal. 表示单点AATSM 该处的累积时间与固定累积时间10 s 的比值. 表1 中同一位置不同材质目标的测量距离不同主要有两个原因:其一为目标本身厚度、形状等的不统一导致实际距离有误差;其二是由于人工更换材料时出现的细微偏差.从图6 可以看出,当固定单像素累积时间为 10 s 时,金属的光子计数峰值最高,达到400;而光盘的光子计数峰值最低,仅为90.这表明光子计数成像系统对不同目标在相同的累积时间下获取的光子事件数是不同的.利用单点AATSM 获取数据时,当获取相同的相关响应事件,金属的累积时间最短,体现在表1 中金属的R10 s最小,光盘的回波信号较弱,甚至无法满足相关响应K=100,而按我们预设的最大累积时间10 s 获取回波信息,因此它的R10 s为1.比较表1中相同目标下K=10 与K=100 时两者的测量距离,当K=100 时测量结果与固定累积时间10 s 时测量结果相同,而当K=10 时测量结果与固定累积时间 10 s 时测量结果有所偏差,表明相关响应阈值越大,获取回波光子数越多,累积的回波信号越强,后期解算结果越精确.当K=100 时这四次测量的累积时间R10 s均值为0.700,表示AATSM 耗时只有固定单像素累积10 s 所花总时间的70%;当我们需要更快获取信息,可以降低相关响应阈值,结合其他后期算法提高测量精度,当K=10 时,这四次测量的累积时间R10 s均值为0.046,总时间只有固定累积时间的4.6%,极大地减少了数据的获取时间. 表1 测量距离与单像素累积时间Table 1.Distance and cumulative time of each pixel. 单点测距实验验证了AATSM 的可行性,用光子计数成像系统对一个目标(太空人模型)进行了扫描实验,目标如图7 所示,扫描像素为 64×88,TCSPC 时间分辨率为 4ps .图8 显示的是固定单像素累积时间为 1s 获取数据的三维重建结果,总数据获取时间近 94 min .图9 显示的是采用AATSM获取数据的重建结果,其中初始值N0100,t01000 ms,K10 .表2 统计了AATSM 的累积时间,扫描过程中单像素最短累积时间为 0.1 ms,最长累积累积时间为 181.5 ms,总的数据获取时间为200.6 s,平均单像素累积时间为 35.6 ms . 图7 目标Fig.7.Target. 表2 AATSM 的扫描时间Table 2.Time of AATSM. 图8 单像素累积 1000 ms 光子计数成像图 (a) 三维重建图;(b) 深度图Fig.8.Three-dimensional (3D) reconstructed image of 1000 ms per pixel acquisition time:(a) The 3D reconstructed image;(b) the depth image. 图9 AATSM 光子计数成像图 (a) 三维重建图;(b) 深度图Fig.9.The 3D reconstructed image of AATSM:(a) The 3D reconstructed image;(b) the depth image. 从图8 与图9 可以看出,AATSM 在不同点累积不同的时间即可获取较理想的实验数据用来重建目标的三维图像.同时对目标在固定单像素累积时间为36,300 和400 ms 获取的数据进行三维重建,结果如图10−图12 所示.由于实物目标图没有准确的三维点云数据,以单像素累积时间最长的重建图像作为参考图像(即单像素累积1000 ms 的重建图像),使用均方根误差RMSE、豪斯多夫(Hausdorff)距离[28]来衡量其他重建图像的质量,其结果如表3 所列,两个评价指标均是值越小,图像越相近. 图10 单像素累积 36 ms 光子计数成像图 (a) 三维重建图;(b) 深度图Fig.10.The 3D reconstructed image of 36 ms per pixel acquisition time:(a) The 3D reconstructed image;(b) the depth image. 图10 表明虽然固定单像素累积时间为36 ms与AATSM 单像素平均耗时相近,但由于在强回波处消耗的时间较多,导致整体不能重建一副可识别图像,表3 也显示重建图像的RMSE 最大.图11和图12 表明在固定单像素累积300 和400 ms 可重建目标三维图像,累积时间越长重建结果越好.本文提出的AATSM 方法重建图像质量从RMSE上看与固定单像素累积 300 ms 的重建图像质量相近,但我们的总时间仅为固定单像素累积的 11.87%,节约了88.13%的数据获取时间. 图11 单像素累积 300 ms 光子计数成像图 (a) 三维重建图;(b) 深度图Fig.11.The 3D reconstructed image of 300 ms per pixel acquisition time:(a) The 3D reconstructed image;(b) the depth image. 图12 单像素累积 400 ms 光子计数成像图 (a) 三维重建图;(b) 深度图Fig.12.The 3D reconstructed image of 400 ms per pixel acquisition time:(a) The 3D reconstructed image;(b) the depth image. 表3 不同累积时间的重建图像指标对比(以单像素累积 1000 ms 的重建图像为参考图像)Table 3.Metrics of the quality of reconstructed images with different acquisition time (The reference image is the reconstructed image of 1000 ms per pixel acquisition time). 为了提高光子计数成像系统的扫描效率,本文提出了AATSM 扫描方法,通过在目标表面的不同区域选取最优的累积光子事件数来减少数据获取时间.对实物目标的三维重建结果说明了重建一幅质量相近的图像,利用AATSM 获取数据的总时间仅为单像素固定累积时间扫描方法时间的11.87%.为光子计数成像系统快速成像提供了一种解决方案,对光子计数成像系统实用化具有重要意义.

3 实验及结果


3.1 单点测距实验




3.2 扫描成像实验







4 结论
