小型电动履带式黑塌菜收获机设计*
2022-08-12户凯亭林旭翔高辉松周永清薛金林
户凯亭,林旭翔,高辉松,周永清,薛金林
(南京农业大学工学院,南京市,210031)
0 引言
黑塌菜属于叶菜类,主要种植于江苏省如皋市黑塌菜种植基地。近年来,随着如皋市对黑塌菜种植产业的大力扶持,黑塌菜的知名度不断提高,当地成规模的黑塌菜种植基地数量稳步增加,如今已经成为当地农产品的重要组成部分。但是,黑塌菜在收获过程对于劳动力的需求高,且由于大量年轻劳动力向城市转移和人口老龄化问题的日益凸显,使得黑塌菜的种植成本逐渐增加、人工短缺问题日益严重[1-2]。
为克服黑塌菜收获阶段的成本问题和人工短缺问题,提高黑塌菜收获期的机械化程度就显得至关重要,可是黑塌菜自身形态与生长环境为机械化收获带来了难度。虽然黑塌菜种植阶段投苗机械成行成列地投苗,但是由于漏播率和后期养料播撒存在不均匀的现象,成熟后的黑塌菜大小不一,行距、株距皆有偏差,且黑塌菜成熟以后,根茎较粗并扎根土下,现有的切割刀具不适于进行黑塌菜土下切割作业,因此不易实现黑塌菜的机械化收获。以如皋市高新区现代农业示范园种植的黑塌菜为例,所采用的收获方式仍为人工收获。
目前,国内外已经研制出一些叶菜类收获机,如意大利的SLIDE TW型的叶菜类蔬菜收获机[3],韩国研制的MT-200型叶菜类蔬菜收获机[4],新西兰研制的一款生菜收获机[5],它们结构设计可靠,操作方便,但是生产制造精度要求高,造价昂贵;国内的南通富来威农业装备公司研制了一款电动叶菜类蔬菜收获机[6],镇江市农业农村局技术推广站研发了4GDS-1.0型的电动叶菜类蔬菜收获机[7]。但是由于黑塌菜特殊的生长特点,以上蔬菜收获机都不适用于黑塌菜的收获作业。
本文针对如皋地区黑塌菜的种植特点,旨在提高黑塌菜采收阶段的收获质量与机械化水平,缓和黑塌菜日益增加的需求与严峻的劳动力短缺问题之间的矛盾,对黑塌菜收获过程进行新的研究,设计了一款电动履带式黑塌菜收获机。在研究过程中根据黑塌菜生物特性完成了黑塌菜收获机关键部件的设计和功率需求分析,利用ANSYS软件对整机机架进行结构静力学分析,证实了机架设计的合理性,采用试验验证的方法,得到了黑塌菜收获机试验数据,并对数据进行了分析。
1 黑塌菜收获机设计要求和结构方案
1.1 黑塌菜收获机设计要求
黑塌菜天生耐寒,即使被霜雪覆盖,依然长势良好,此外,排灌、通风良好、肥力均匀的砂壤土是黑塌菜理想的种植环境,因此,如皋市黑塌菜种植模式多采用露天田地种植。黑塌菜投苗采用人工与机械投苗相结合的方式,深耕整地,施足基肥,菜畦分界清晰,黑塌菜成行成列、塌地生长、株型平展,且黑塌菜根茎较粗,入土较深,而菜叶柔软、低趴于土表,容易损坏,因此在收获过程中,应尽量减小对菜叶的损伤,以上因素是设计黑塌菜收获机时必须考虑的问题。
根据黑塌菜的生长特点和收获要求,黑塌菜收获机应满足5点设计要求:(1)黑塌菜收获机在实际作业环境中,需要考虑坑洼或湿烂地面对行走装置和切割装置带来的影响,收获机应具备田间工作环境适应性强与结构紧凑等特点。(2)为了减少或消除收获机的污染排放、践行绿色环保的作业理念,该收获机以可循环充电的动力电池作为动力源。(3)由于黑塌菜根茎深度不一,收获作业时,收获机应具备土下切割深度调节的能力,以满足黑塌菜不同生长状况的收获要求。(4)黑塌菜菜叶柔软,容易损坏,在输送过程中应尽量减少对黑塌菜菜叶的损伤。(5)整机尽量工作灵活,制造简单,性能稳定和质量可靠。
1.2 黑塌菜收获机整机结构
本文设计的电动履带式黑塌菜收获机主要装置有切割装置、输送装置、割茬高度调节装置、行走装置以及收集装置,如图1所示。切割装置位于整机前端,在保证黑塌菜整体完整的情况下切断根茎;输送装置与切割装置紧密衔接,将切下的黑塌菜低损平稳地输送至收集装置;收集装置位于整机后端,用于盛放输送来的黑塌菜;行走装置位于整机底端,与地面直接接触,使收获机具备行走的能力;割茬高度调节装置位于行走装置前端和输送装置前端之间,用于调节切割装置的割刀高度。

图1 整机设计图Fig. 1 Overall structure of the designed machine1.切割装置 2.压持输送装置 3.链板输送装置 4.收集装置 5.割茬高度调节装置
收获机工作时,由操作人员手扶控制前进,根据黑塌菜的成熟状况与作业环境,实时调整黑塌菜根茎切割深度。随着收获机的前进,圆滑托片及柔性压持装置将切下的黑塌菜输送至链板输送带,柔性压持装置的刮板兼具韧性和柔软度,在黑塌菜传送过程中能有效降低对菜叶的损伤,保证收获质量。链板输送带在将黑塌菜输送至收集装置的过程中,完成筛土,表1为所设计的黑塌菜收获机相关设计参数。
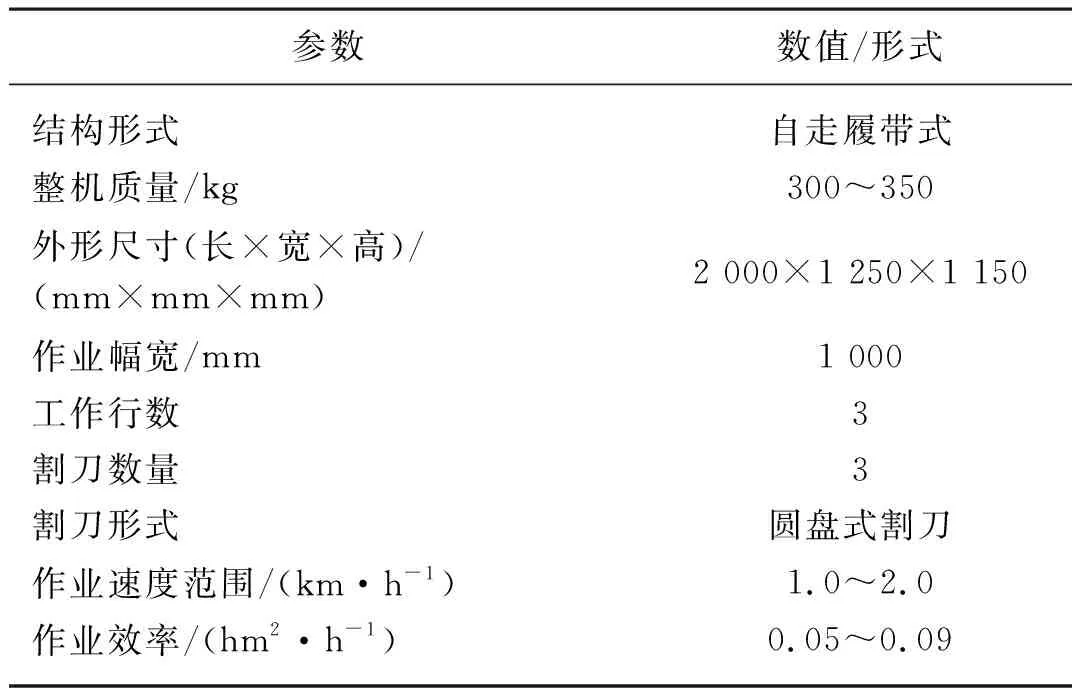
表1 主要设计参数Tab. 1 Main design parameters
1.3 收获机关键部件结构
1.3.1 切割装置
切割装置是黑塌菜收获机的核心装置之一,如图2所示,主要包括圆盘割刀、直流电机、减速器与槽钢支架等。直流电机是切割装置的动力机构,嵌于槽钢支架之中,电机轴通过键与减速器连接,实现减速增扭。减速器的输出轴带动割刀轴运动,割刀轴的下端通过短销与小连接盘刚性连接,圆盘割刀通过螺栓与小连接盘刚性连接,工作时,直流电机带动割刀轴转动,从而带动圆盘割刀作高速圆周运动。
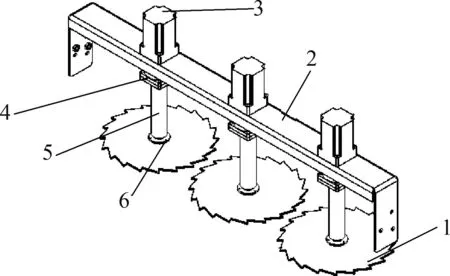
图2 切割装置的总体结构Fig. 2 Structure of the cutting device1.圆盘割刀 2.槽钢支架 3.直流电机 4.减速器 5.割刀轴 6.小连接盘
蔬菜收获机的切割装置主要分为以下3种形式:往复式、圆盘式与带刀式。本文选择圆盘式切割装置的主要原因如下:(1)往复式割刀在使用过程中,会因为切割速度较大而产生明显的冲击和振动现象,对被切割的蔬菜和切割传动装置不利,并且对于土下切割来说,往复式割刀容易出现卡齿问题,降低割刀的使用寿命[8-9]。(2)圆盘式割刀切割平稳,材料在单位时间内受力较为均匀,蔬菜的切口比较平整,振动惯性小。对于本文要求土下切割黑塌菜较粗的根茎,圆盘式割刀能够实现平稳切割,且对菜叶的损伤很小。(3)带刀式切割装置制造简单,工作性能可靠,但是切割前需要使带刀的切割速度达到要求,割刀电机的频繁启停会导致带刀的惯性对切割装置造成损伤,同时存在无用功率损耗大的问题[10]。
为了更好地切割黑塌菜根茎,改进圆盘割刀结构形式。与其他形状的切割器相比,锯齿式割刀刃口锋利,可以将蔬菜的茎秆轻易切开,且切割阻力较小,切口平整,切割效果理想[11-12]。黑塌菜圆盘割刀的外形设计采用与螳螂前肢类似的锯齿形状,因为科学研究发现螳螂的捕食技术之所以如此高超,与其前肢上锋利的锯齿状刃口息息相关[13-14],圆盘割刀的结构参数示意图如图3所示。

图3 圆盘割刀的结构参数示意图Fig. 3 Structural diagram of parameters of disc cutter
为使圆盘割刀的切割齿均匀分布、消除半齿等不合理的加工要求、提高割刀的切割效果与切割效率,本文设计的圆盘割刀关键结构参数应满足以下关系。
πD=jx1z
(1)
j=h/y1
(2)
式中:D——圆盘割刀直径,mm;
j——螳螂前臂有效切割齿的拟合优化曲线的放大倍数;
x1——处理前螳螂前臂有效切割齿拟合曲线的宽度,mm;
h——齿深,mm;
z——圆盘割刀齿数;
y1——处理前螳螂前臂有效切割齿拟合曲线的高度,mm。
式(3)与式(4)是螳螂胫节的有效切割齿曲线,两曲线可达到0.992 5以上的拟合度,精度较高,可以用作圆盘割刀的设计参考。
y1=-0.623 36x3+2.447 16x2-2.628 52x+
1.182 55
(3)
y2=28.213 02x3-146.144 2x2+253.302 17x-
146.431 9
(4)
由拟合曲线方程可得x1=1.2,y1=0.4。
为有效切割黑塌菜根茎,圆盘割刀的齿高应大于黑塌菜茎叶处的直径,由黑塌菜的生长特性可知,该处直径的最大值为15.68 mm,所以h≥15.68,于是将圆盘割刀的齿深h设计为16 mm。
代入式(2)可得j=h/y1=16/0.4=40。
D=48z/π
(5)
当圆盘割刀的转速不变时,增大刀盘的直径,可以有效提高切割刃口的线速度与圆盘割刀的切割效果,使黑塌菜的根茎更容易被切下,综合考虑黑塌菜种植行距、株距,以及切割装置的尺寸,将圆盘割刀的直径D设计为300 mm。
通过以上计算,最终D取300 mm,h取16 mm,z取20,查阅相关资料可知,最佳的割刀刃角[15-16]选取范围为10°~15°,考虑到土下切割黑塌菜根茎的情况,本文将圆盘割刀的刃角α设计为10°。
1.3.2 整体输送装置
整体输送装置如图4所示,主要包括输送电机、链板输送装置、压持输送装置和三组托片,其功能是将切割后的黑塌菜低损、平稳、高效地输送到收集装置。

图4 输送装置总体结构Fig. 4 Structure of the conveying device1.输送电机 2.链板输送装置主动轴 3.链板输送装置从动轴 4.压持输送装置主动轴 5.弯板链条 6.托片 7.压持输送装置从动轴 8.压持输送装置从动齿轮 9.刮板 10.压持输送装置主动齿轮 11.链板输送装置从动链轮 12.输送链板 13.链板输送装置主动链轮
链板输送装置主要由链板输送装置主动链轮、链板输送装置主动轴、链板输送装置从动轴、链板输送装置从动链轮、弯板链条与输送链板组成;压持输送装置包含压持输送装置主动链轮、压持输送装置主动轴、压持输送装置从动轴、压持输送装置从动链轮、弯板链条与刮板等,位于前端三组托片的上方,具体情况如图5所示。

图5 输送装置布局Fig. 5 Layout of the conveying device1.链板输送装置 2.压持输送装置 3.托片
输送电机为链板输送装置与压持输送装置提供动力,压持输送装置中刮板连续运动将黑塌菜沿着托片向上刮送,当黑塌菜被刮送到链板输送装置时,再由输送链板将黑塌菜输送至收集装置。图5中θ1为压持输送带与水平地面间的夹角;θ2为链板输送带与水平地面间的夹角。
图6是黑塌菜根茎切割时的受力示意图,θ角的大小不仅影响托片对黑塌菜的支持力F,还会影响压持装置对黑塌菜的拨力P,如果该角度过大,会使切割后的黑塌菜无法进入输送装置,从而在输送装置的前端产生堆积现象;如果该角度太小,在输送距离不变的情况下会导致收获机后方高度降低,使手扶作业人员感到不适。图6中G为黑塌菜所受的重力,N;F为托片对黑塌菜的支持力,N;θ为输送带与水平地面间的夹角,(°);P为压持装置对黑塌菜的拨力,N。
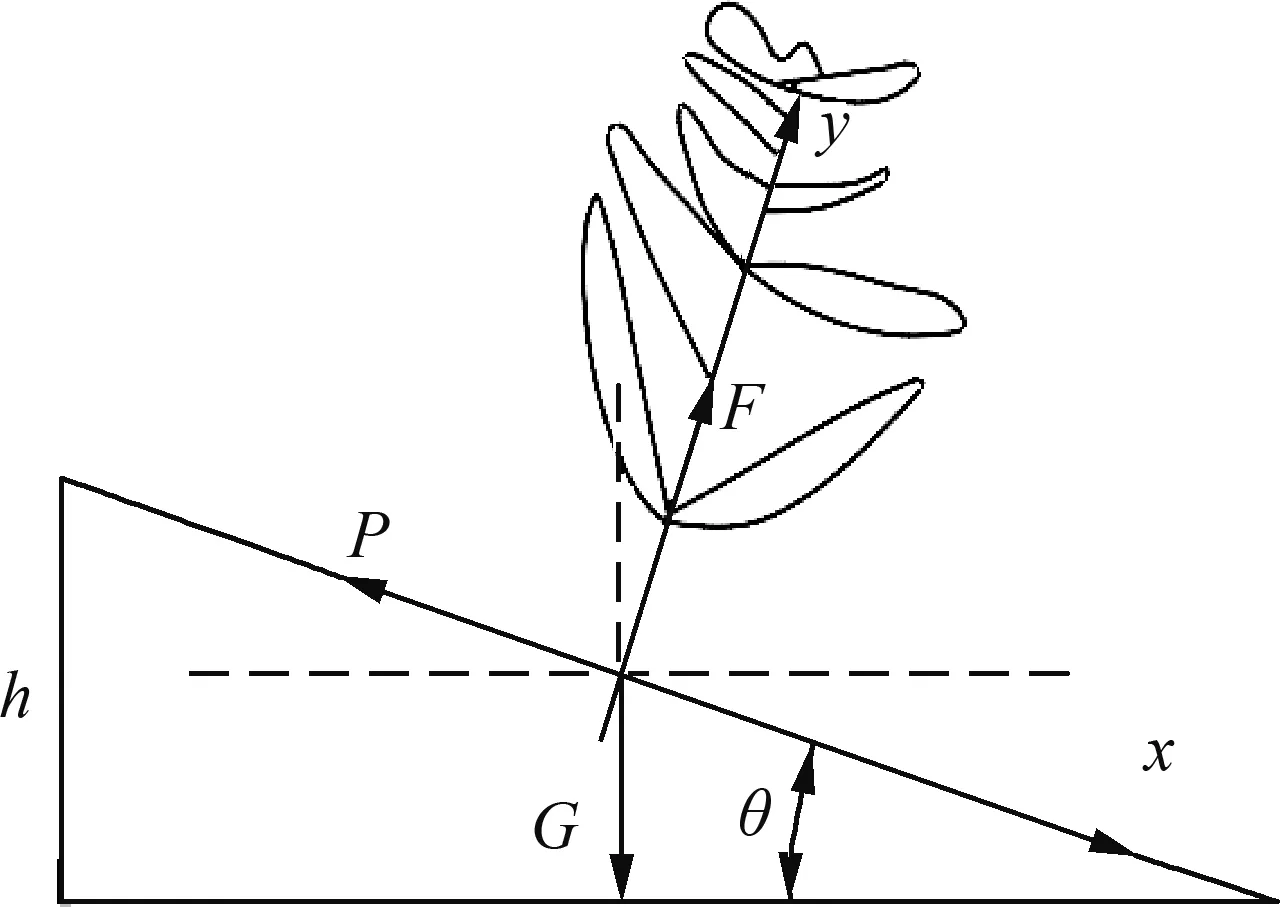
图6 黑塌菜受力分析图Fig. 6 Stress analysis diagram of black leaf-drooped vegetable
查阅蔬菜收获机的资料可知,输送带倾角的范围为20°~40°,根据黑塌菜收获要求和设计要求,确定链板输送带的倾斜角度θ2取25°。
压持输送带需要对黑塌菜产生有效的拨力,同时压持输送带的后端要略微上扬,避免阻碍到黑塌菜从托片向链板输送带的过渡,综合考虑,压持输送带的倾斜角度θ1取30°。
1.3.3 割茬高度调节装置
割茬高度调节装置主要由两根电动推杆组成,当黑塌菜收获机工作时,通过收获机扶手处的控制面板按钮实现对两根电动推杆的控制,使两根电动推杆以同速或差速伸长或缩回,从而实现切割装置与输送装置的高度调节。当黑塌菜收获机在田间行驶时因地面高低不平导致两侧履带行走机构倾斜时,可以单独控制其中一根电动推杆伸长或缩回,从而使切割装置始终以水平的姿态进行切割作业。
图7为割茬高度调节装置的工作情况,表明了割茬高度调节装置在两种极限工作情况下的位置关系,即切割装置的最低工作姿态和最高工作姿态。

(a) 最低工作姿态

(b) 最高工作姿态图7 割茬高度调节装置工作简图Fig. 7 Work diagram of stubble height adjustment device
1.4 各装置功耗需求分析
1.4.1 切割装置功率分析
圆盘式切割装置的功率消耗P1[17]用式(6)表示。
P1=kE1S
(6)
式中:k——常量系数;
E1——准静态状态下切割装置切割单棵黑塌菜消耗的能量,J;
S——在单位时间内所能切下黑塌菜的棵数,棵/s。
考虑到土下切割方式与圆盘割刀形式,系数k取1.9;根据黑塌菜根茎的剪切性能试验,E1取0.8;根据黑塌菜收获机的切割速度和前进速度,S取0.8棵/s。将数据代入式(6)可得P1=1.216 kW。
1.4.2 输送装置功率分析
输送装置的功率消耗P2主要包括链板输送装置功率Pd和压持输送装置功率Py两个部分,根据式(7)计算链板输送装置功率Pd。
Pd=Mg(Lf0+H)/103
(7)
式中:M——单位时间内输送带所能运输黑塌菜的质量,kg;
g——重力加速度,m/s2;
L——输送带在车辆水平前进方向上的投影距离,m;
H——输送带的垂直高度,m;
f0——运动阻力系数。
取M=6 kg,g=9.8 m/s2,L=0.950 m,H=0.60 m,f0=2.25,代入式(7)计算可得Pd=0.164 kW。
压持装置功率Py按式(8)计算。
Py=Tw/N=F1Rw/N
(8)
式中:T——压持装置在运动过程中所受的阻力矩,T=F1R,N·m;
F1——压持装置在运动过程中所受的阻力,N;
R——压持装置转动的圆弧半径,mm;
w——压持装置输送带运动的角速度,rad/s;
N——动力系数。
取F1=60 N,R=61 mm,w=0.4 rad/s,N=50,代入式(8)可得Py=0.029 3 kW。
因此,输送装置的总功率P2=Pd+Py=0.164+0.029=0.193 kW。
1.4.3 割茬高度调节装置所需功率分析
割茬高度调节装置使用电动推杆,其功率P3采用极限位置法确定,即在极限情况下,由电动推杆单独支撑起机架、切割装置及输送装置。
P3=F2v
(9)
式中:F2——电动推杆推动过程中的载荷,N;
v——电动推杆推动速度,m/s。
取F2=1 000 N,v=0.01 m/s,代入式(9)计算可得P3=0.01 kW。
1.4.4 行走装置所需功率分析
行走装置功率P4与黑塌菜收获机的行走速度、整机质量与土壤状况有关。
P4=(mgf1v1/η)×10-3
(10)
式中:m——黑塌菜收获机满载时的总质量,kg;
f1——行走阻力系数;
v1——黑塌菜收获机的行走速度,m/s;
η——行走装置的传动效率。
考虑到土下收获时整机的行走阻力较大,取m=370 kg,f1=0.45,v1=0.3 m/s,η=0.98,代入式(10)可得P4=0.499 5 kW。
1.4.5 电机选型
根据黑塌菜收获机的设计要求与作业环境,本文的驱动电机、割刀电机和输送电机均选择直流电机。黑塌菜收获机的驱动电机选用MY1020型直流电机;切割装置由3组圆盘式割刀组成,并且3组割刀由3个相同的电机独立控制,本文选用型号为80BL100S50-430TK9直流电机;输送电机选用80BL100S40-430TK9型直流电机,所选电机的主要参数如表2所示。

表2 驱动电机主要参数Tab. 2 Main parameters of Driving motor
2 机架结构设计与静力学仿真分析
2.1 机架结构设计
黑塌菜收获机的机架是整机的载体,其作用主要是将各个装置连接成一个有机的整体,同时承载各机构的负荷和质量,根据特定的位置关系、约束关系与作业要求,将切割、输送、行走与割茬高度调节装置安装在机架的相应位置[18]。在确保所有装置正确安装的前提下,机架的结构、制造工艺和加工流程应尽可能简单,考虑到节约成本与绿色制造的要求,收获机的机架主要选用普通钢钣金和方管。
机架主要由壁厚为3 mm的Q235A钢材空心方管、2 mm厚的钣金侧板以及3 mm的底盘钢板焊合而成。机架上部的主要作用是安装输送装置,为主、从动轴的布置提供安装空间;在机架下方底盘钢板两侧,安装有行走装置,同时钢板用来安置动力电池,钢板的后方安装有驱动电机和减速器;在机架的前端,安装有切割装置的槽钢支架和用来安装托片的槽钢横梁;在机架槽钢横梁的后方,具有用来安装割茬高度调节装置电动推杆的耳板;在机架的后方安装有收集装置,可对黑塌菜进行收集。
2.2 机架的结构线性静力学分析
为了直观量化地分析机架在稳定载荷作用下产生的位移、应力、应变等情况,本文选择利用ANSYS软件对机架进行结构线性静力学分析[19-20]。在ANSYS-Workbench中导入机架实体模型,采用自动网格划分的方式,并将单元尺寸Element Size设置为0.01 m,其余参数采用系统默认值,不加修改。网格划分后,为机架添加约束和载荷,在机架底板的下方、后端方管以及扶手处添加Fixed Support固定约束,保持机架固定状态,避免仿真分析报错。机架底板和左、右侧板承载着收获机的整体负荷,考虑到各部位的承载情况,机架底板承受着动力电池的重量,取400 N;左、右侧板前端共同承受着切割装置的重量,各取125 N;槽钢横梁承受着三组托片的重量,取50 N;两侧侧板上主、从动轴的安装孔承载主、从动轴的重量,各取10 N。选择求解器计算,查看分析结果和相应的云图。本仿真试验主要探析机架在负载情况下的变形与受力情况,求解完成后通过总体位移云图和应力云图观察机架的变形和应力情况。
机架的总体位移云图如图8所示,通过位移云图可知,由于两侧侧板前端承载的切割装置质量较大,所以此处的变形量最大,为0.929 mm,但该变形量对于机架整体尺寸来说非常小,可以接受。通过结构线性静力学分析可知,黑塌菜收获机的机架结构设计合理,在正常负载的情况下不会出现较大的变形。

图8 机架总体位移云图Fig. 8 Total deformation nephogram of frame
机架的等效应力云图如图9所示,通过应力云图可知,机架整体所受的等效应力较小,且没有应力集中现象,连接板后端的等效应力最大。如图10所示,最大等效应力值为117.8 MPa,在Q235A钢材的许用应力范围内,机架的设计满足黑塌菜收获机设计要求。

图9 机架等效应力云图Fig. 9 Equivalent stress nephogram of frame

图10 机架最大等效应力位置Fig. 10 Maximum equivalent stress position of frame
3 黑塌菜收获机样机性能试验
3.1 试验方法
为验证黑塌菜收获机工作性能,以收获效率与漏割率为性能指标开展相应的田间收获试验。
1) 收获效率。收获效率指单位时间内的作业面积。首先选择一块合适的田地作为黑塌菜收获机试验区域,当收获机正常稳定地收获时开始计时,直到收获作业结束,作业面积与时间的比值即为黑塌菜收获机的收获效率。
2) 漏割率。漏割率C指在划定的试验区域内,收获机作业后未被收获的黑塌菜数量与试验区域内总的黑塌菜数量之比。选择一块合适的田地作为试验区域,试验前清点并记录该试验区域内黑塌菜的总数量B1,收获作业结束后清点并记录未被切割的黑塌菜数量B2。
C=B2/B1×100%
(11)
3) 经济性分析。传统收获机械采用柴油发动机作为动力源,本文的黑塌菜收获机以动力电池作为动力源。为探究收获机的经济性,计算黑塌菜收获机收获作业过程中整机的耗电量W,耗电量可按式(12)进行计算。
W=Pt
(12)
式中:P——黑塌菜收获机所用电机的总功率,kW;
t——黑塌菜收获机的作业时间,h。
按照以上分析方法,以江苏省如皋市黑塌菜种植基地的黑塌菜种植田为试验区域开展黑塌菜收获机性能试验,检验收获效果。本文试验选择两块形状相似的黑塌菜种植区域,每个种植区域长50 m,宽4 m,土壤为砂壤土,土粒松散,本机的履带行走装置可以很好地适应作业环境。
首先,清点并记录两块试验田内黑塌菜的总棵数,通过电动推杆改变割茬高度分别完成土下和土表的收获作业。收获完成后,再次清点并记录以两种切割方式收获后区域内未被切割的黑塌菜数量,通过漏割率计算公式分别求得两种切割方式下的漏割率。其次,在试验区域内选择三块10 m×3 m的小区域,测量并记录这些小区域内被切割黑塌菜残余的根茎高度,取其平均值作为试验数据中的割茬高度。然后,根据计时得到收获机在试验区域内的作业时间,经过计算求得收获机的收获效率,最后,依据前文的功率分析,计算满负荷工作状态下收获机完成收获作业所耗费的电量。
3.2 试验结果与分析
试验结束后,根据3.1小节计算公式可得收获机收获试验数据,可知收获机土下切割作业的平均割茬高度为10.5 mm,漏割率为3.5%,收获效率为0.09 hm2/h,耗电量为0.64 kW·h。黑塌菜收获机在满负荷工作状态下的耗电量约为28.77(kW·h)/hm2,若平均电价为0.51元/(kW·h),所研制的小型电动履带式黑塌菜收获机收获每公顷黑塌菜的成本为14.67元,这相对于人工收获来说大大降低了劳动成本,且收获全程无污染排放。此外为探究黑塌菜收获机的经济性,对整机生产成本和使用成本进行分析,生产成本主要包括用于购买钣金件、方管、履带底盘、变速器、电机驱动器套装、链轮、弯板链条等外购件的费用(1.0万元),以及工时成本(0.8万元),整机的总成本约为2.4万元。通过市场调研了解到,类似的小型蔬菜收获机的售价约为5万元左右,对比之下,本文设计的小型电动黑塌菜收获机在成本方面有很大的优势。
4 结论
本文考虑到江苏省如皋市地区黑塌菜成行成列种植、塌地生长、菜叶低趴于土表、菜叶柔软易损、根茎粗壮等生长特点,参照国内外SLLDE TW、MT-200与4GDS-1.0等叶菜类蔬菜收获机械,设计研制了一款具有土下收获作业功能的小型电动履带式黑塌菜收获机,主要设计的关键装置包括切割装置、输送装置和割茬高度调节装置,该黑塌菜收获机集黑塌菜切割、输送及收集功能于一体。对收获机关键装置功耗进行需求分析,并选择合适的电机作为动力源;利用ANSYS有限元软件对收获机整机机架进行静力学分析,由分析结果可知收获机机架的最大变形量为0.929 mm,最大等效应力值为117.8 MPa,形变和受力情况均在合理范围内,证明了机架设计的合理性。为了验证黑塌菜收获机的工作性能,在如皋市黑塌菜种植基地进行收获试验,以收获效率和漏割率作为评价标准,试验结果表明收获机实际工作时漏割率为3.5%,收获效率为0.09 hm2/h,平均割茬高度为10.5 mm,能够很好地完成黑塌菜的收获作业,提高黑塌菜收获效率,减轻农民劳动强度,满足收获要求。黑塌菜收获机收获每公顷黑塌菜的成本为14.67元,经济和环保效益高,而且机器生产制造成本低,对推动地区蔬菜种植产业的发展将具有深远的意义,可用作如皋地区黑塌菜收获机械的参考样机。
