基于盲人出行设计防摔倒监报功能智能导盲杖
2022-08-12张赢张政许梦余郭晗冷秀娟
张赢,张政,许梦余,郭晗,冷秀娟
(青岛黄海学院,山东 青岛 266427)
0 引 言
根据国家卫生部门的统计,我国盲人超过了1 400 万,每年新增的盲人和弱视群体就超过40 万人,出行问题无疑成为当下热点。随着科学技术的快速发展,盲人对智能辅助设备的应用降低了对传统盲杖的依赖。虽然为部分盲人带来便利,但在总体上智能设备实际应用性和可操作性较低,根本无法防止盲人摔倒。根据调查显示,现阶段我国市场上盲人智能出行产品的研发还处于前期发展阶段。为此,我们致力于设计出一款基于防摔倒监测功能的智能盲杖,保障盲人的安全,让家人放心。
1 盲人出行摔倒分析
盲人独自出行摔倒的原因根据个人因素与环境因素分析结果如下,除去视觉通道的缺失的其他个人因素主要有以下几点:(1)部分平衡感较差的盲人在行走的过程中更易跌倒;(2)从未或鲜少行走过的路段加大了摔倒的可能性;(3)内心对迷茫和黑暗的恐惧和心理压力。而环境因素主要是路况设施较差,盲道被等占比比皆是,以及一些其他原因,比如街上行人较多、杂物障碍也较多、车流量大、道路坑坑洼洼等。
2 盲人摔倒风险分析
盲人摔倒事件不仅发生次数多,造成的后果往往也比较严重,加上盲人呼救不便可能在救助的过程中会有一定的困难。跌倒对于盲人出行是一大障碍,其后果有失去方向感、不同程度的受伤、陷入昏迷、跌入深坑或下水道中等。身体任意部位都有可能出现系统性碰撞损伤。而骨折、肌肉挫伤、淤血、内出血和颅内出血是摔伤的主要症状而往往这些症状会导致脑震荡、休克和死亡。由于身体不同部位的抗性不同,不同的摔倒姿势造成的伤势也不尽相同。对于独居或外出的盲人而言,及时被发现跌倒并自动呼救,是有效减少盲人的伤害和减少医疗费用的好方法。
3 人体摔倒过程分析
针对人体运动的高度的复杂性和不确定性的特点,我们把摔倒过程分为:安全状态、失衡状态与轻微碰撞状态和下落后相对稳定的运动状态。摔倒这一状态包括两个主要特征:身体姿势的变化以及周围物体对身体的影响。我们识别人体跌落的基础运动学信息是跌倒过程以及跌倒过程中每个运动状态所呈现的。人体跌倒预测的研究则需要判断低势物体在首次撞击前的运动状态。
为了计算人体摔倒时相关的运动参数,拟定义了每一部位的坐标和旋转方向。设水平面坐标系为OXZY。其中Z 轴垂直于地面,OXYZ 随躯干运动而改变对应方向,坐标系OXYZ 与坐标系OXYZ 平行时当身体为正常直立的状态,X轴为前方,Y 轴为左边,Z 轴为右边。
摔倒时身体的姿势会有一定程度的变化。一般来说,身体在跌倒时接近垂直,摔倒后接近水平。摔倒情况因人而异,当盲人在不同的生活行为中,会有一些类似摔倒的行动,例如下蹲这类运动。因此,识别跌倒行为可以通过肢体变化来实现。
躯干方向的变化可以用躯干的角度来表示。如图1所示,躯干相对于地面坐标系OXYZ 的角度1、2 和3 按照“身体轴1-2-3”的顺序定义式中,1 是滚动角度,绕X 轴旋转;2 是俯仰角,绕Y 轴旋转。3 是自旋角,绕Z 轴旋转。
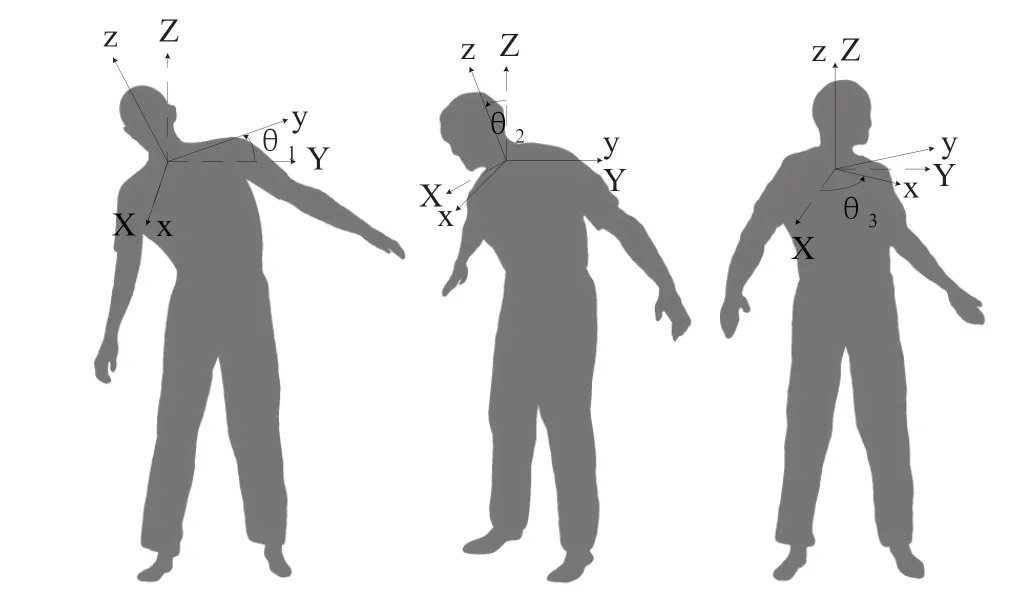
图1 人体躯干旋转角的定义
在人体坠落的过程中,横滚角1 或俯仰角2,或两者都有很大的变化。此外,角速度&;1 和&;2 的变化比盲人日常生活中的变化更为严重。旋转角3 在人类坠落期间没有显著变化,因此不能用作坠落的特征。
4 核心模块设计
4.1 摔倒过程信息获取
信息获取、计算机与自动化、通信和网络作为信息科学的三大支柱通过信息技术识别人体摔倒时的运动状态,首要的是要识别倒地过程中的信息并获取可利用的细节并分析其运动的特征。
4.2 摔倒检测分析
在人体正常进行运动时,加速度处于一个限定的阈值内。然而,当跌倒发生时,它通常只持续很短的时间,大约1 ~2秒。在人身体失衡的瞬间,会突然倾斜,加速度会随着身体的剧烈运动急剧变化。人体的身体姿势下跌倒后会发生变化,一般是由站立状态变为坐姿或平躺或者趴伏,身体各个部位也会发生很大的加速度变化。一般用加速度变化阈值来确定盲人是否摔倒。
4.3 摔倒检测算法
智能导盲杖可以通过加速度传感器、角运动检测装置、差压传感器等多个内置传感器获得人当前的状态信息,并通过逐层检测获得盲人当前运动状态,并通过三者的相应变化来综合判断盲人是否摔倒。若超过设定的阈值,则生成摔倒报警信号触发语音报警模块。
多样性和不确定性是人体运动过程具有的,不同的运动具却有不同典型的特征,因此提取姿态特征向量来区分不同的运动类型,包括速度、加速度和信号向量SVM(SVM)幅值和MADS(差加速度幅值的平均绝对值)。人跌倒是一种瞬间的剧烈活动,这一过程可分为几种状态:初始安全、失去平衡、撞击地面、跌倒地面、保持平衡和休息。
从安全状态到下降状态,加速度和加速度矢量差SVM的变化过程从零开始先大后小,MADS 的平均值的变化过程从零开始先大后小。垂直偏航角偏航是指人体与地面之间的角度远大于或远小于90°,正常垂直角度约为90°;系统采用三级阈值判断人体的坠落状态,将人体垂直地面方向定义为Z 轴,前后方向定义为X 轴,左右方向定义为Y 轴,如下所示:

其中,m、m、m分别为X 轴、Y 轴加速度与Z 轴的加速度。

其中:为时间周期。

4.4 系统软件设计
系统软件设计,主要包括Arduino 芯片开发部分和智能安卓手机软件开发部分。Arduino 的片上开发部分使用类C语言开发数据采集、数据处理、数据封装和蓝牙传输控制等功能。对于Android 手机,它负责接收通过蓝牙发送的信号,并将接收到的数据转换为以下算法可用的数据类型,数据类型保存在日志中。Xml 文件在Android 手机上的SD 卡上,也可以处理数据。通过阈值分析算法,可以发现盲人是否摔倒,识别严重程度,若是严重摔倒及时发送给家人手机的小程序,并且发出警报,寻求路人的帮助。
4.5 Arduino 开发板开发
Arduino开发板主要对传感器采集的数据进行初步处理,并用蓝牙连接智能安卓手机进行数据传输。
第一步是通过Arduino 开发板控制两个传感器的数据采集频率,并控制蓝牙以相同的频率发送数据。此外,由三轴加速度传感器采集的数据,即三轴加速度和三轴加速度数据,进行了局部数据处理。需要使用的机械启动,设置和转换为角速度。角速度的转换不是以他的速度,而是以角速度的线性关系。处理这些数据只获得合理的速度最后,所有的数据处理后,Arduino 开发团队将蓝牙传感器的数据在同一频率范围。使用蓝牙传感器进行数据移动和数据传输,Arduino 开发板流程如图2所示。首先,系统初始化。初始化后,加载加速度和角速度传感器驱动器。加载驱动器后,采集加速度和角速度数据,并传输数据。
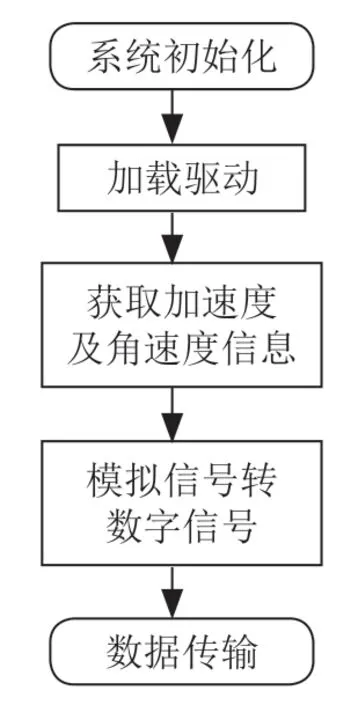
图2 Arduino 开发板流程图
4.6 Android 手机端开发
Android 程序主要负责接收蓝牙传入的数据,并对数据进行进一步的分析和计算,并根据的算法判断人体的当前状态。该软件将控制手机在检测到坠落时发出警报。具体的报警类型可以是发出警报声、呼叫帮助、发送紧急求助信息等。
开发了安卓平台应用软件,可以简化软件轻松安装在安卓操作系统智能导盲杖上,一方面方便用户,用户无须使用额外的单功能设备,增强了系统的实用性和可移植性;另一方面,手机强大且相对成熟的通信技术也可以极大地帮助求救信息的传输,提高系统的可用性。Android 系统流程如图3所示。
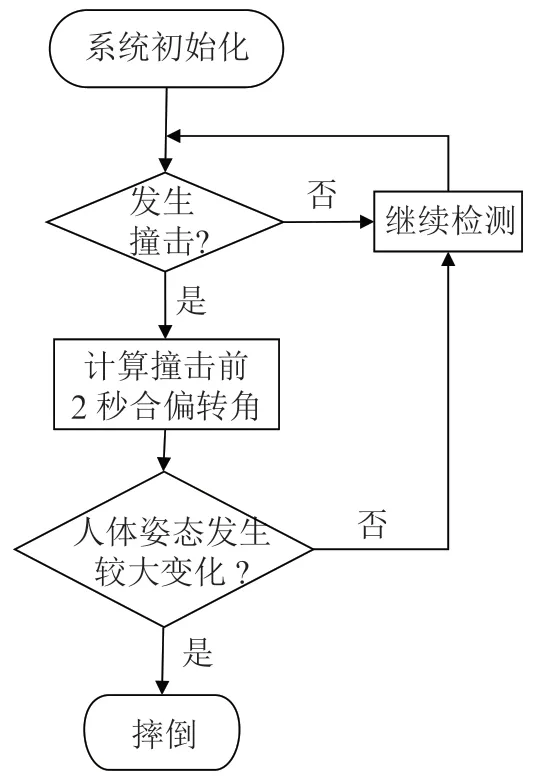
图3 Android 系统流程图
5 结 论
本文提出了一种基于物联网的盲人意外摔倒报警导盲杖系统的设计,生产成本低,精度高,实用性强,硬件产品设计科学,携带方便,符合当前市场趋势,未来,许多盲人家庭用户将关注智能防摔倒报警系统的研究与实现,这将在一定程度上缓解我国视障人士的出行压力。提高盲人的生活质量在家庭忙于工作时,利用智能技术帮助他们,可以为盲人提供更全面的关爱。