基于级联H桥变频器的极相调制感应电机驱动系统*
2022-08-09吴伟亮黄朝志刘细平叶景贞
吴伟亮, 黄朝志, 刘细平, 叶景贞, 梁 玲
(江西理工大学 电气工程与自动化学院,江西 赣州 341000)
0 引 言
高压电机具有大惯性、大功率的优点,已广泛用在新能源发电系统、工业传动领域、船舶推进系统中[1],比如新能源发电系统中的抽水蓄能水轮机组、风力发电机组,工业领域中的轧钢机、鼓风机、石油压裂撬机,其他发电站的燃气轮机组、火力发电机组、大型调相机组,船舶推进电动机等均是高压电机。采用高压变频器对高压大功率电机进行变频调速控制,既可以节约电能,又可以延长电机寿命,还可以降低生产成本[2-3]。
目前高压变频器的类型有晶闸管电流型变频器、二极管箝位型多电平变频器、飞跨电容型多电平变频器、级联H桥型多电平变频器、模块化多电平变频器等[4]。文献[5-6]中介绍了抽水蓄能电站和高压换流站采用电流源型变频器进行同步电机的静止变频起动控制,电流源型变频器中晶闸管为半控型开关器件,存在晶闸管性能下降引起关断角的余量不足而导致换相失败发生的风险,另外电流源型变频器产生的谐波较大,对输入侧电网电能质量产生影响。文献[7-8]中介绍了二极管箝位型多电平变频器及中性点电位平衡控制,随着输出电压等级提高,二极管箝位型多电平变频器的电平数也要相应地增加,导致其拓扑结构和控制策略更加复杂,实现难度更大。飞跨电容型多电平变频器悬浮电容过多,合理地选择开关状态非常困难。文献[9-10]介绍了模块化多电平变频器,该拓扑结构的变频器具有模块化、易于拓展的优点,且输出波形正弦度较高,在高压直流输电中应用广泛,但是在高压变频领域中,面临着低速下电容电压波动过大的问题,尤其是电机重负载静止起动时,电容电压波动非常大,容易造成电容器损坏。文献[11-12]介绍了级联H桥型多电平变频器,该拓扑结构的变频器具有输出容量大、易于模块化、易于拓展且输出波形正弦度较高的特点,应用于风力发电系统、抽水蓄能发电系统、工业变频、静止无功发生器、大功率有源电力滤波场合。
多相电机由于大功率、高可靠性、高转矩密度等优点,在船舶推进、新能源发电、新能源汽车驱动、航空航天器驱动等领域被广泛应用。文献[13-14]介绍了具有极相调制定子绕组结构的多相感应电机,通过给定子绕组注入特殊规则的交流电源,可以实现不同极相调制模式,从而扩展电机的转矩和转速范围。
本文在文献[11-12]的研究基础上,介绍一种每相由6个功率变换单元级联的多电平变频器以及一种定子绕组可配置为9相4极和3相12极的极相调制感应电机(PPMIM),并介绍了级联H桥变频器的拓扑结构、载波移相正弦波脉宽调制技术,以及极相调制感应电机的数学模型、转子磁场定向控制、极相调制矢量控制等。最后通过仿真验证了级联H桥多电平变频器拖动极相调制感应电机的变频调速性能和极相调制矢量控制性能,为新能源发电、船舶推进、工业传动等高压大功率领域提供技术保障。
1 主回路拓扑结构及分析
图1为每相由6个功率变换单元级联构成的多电平变频器拖动具有极相调制绕组结构的感应电机的主回路结构。主要包括10 kV交流电网,预充电接触器(Q2),预充电电阻(R1~R3),输入断路器(Q1),10 kV/0.65 kV多抽头移相变压器(T1),功率单元(A1~A6、B1~B6、C1~C6、D1~D6、E1~E6、F1~F6、G1~G6、H1~H6、I1~I6),极相调制感应电机等。
从图1中可以看出极相调制感应电机有9相定子绕组;多抽头移相变压器副边总共有54组独立的三相交流电源,因此每相定子绕组需要分配6组独立的三相交流电源,且相邻序号的两组三相交流电源之间的相移差为30°;每个功率单元由三相不控整流器、H桥逆变器、直流支撑电容等组成,其中三相不控整流器输入源为移相变压器的副边输出的三相交流0.65 kV电压。每相的第一级功率单元H桥逆变器首端相互连接,形成输出多相电压的中性点,其他各级功率单元H桥逆变器首尾相连,最后第六级的尾端连接至极相调制感应电机的定子绕组。当输出电压幅值越大,要求级联的数量也越多。
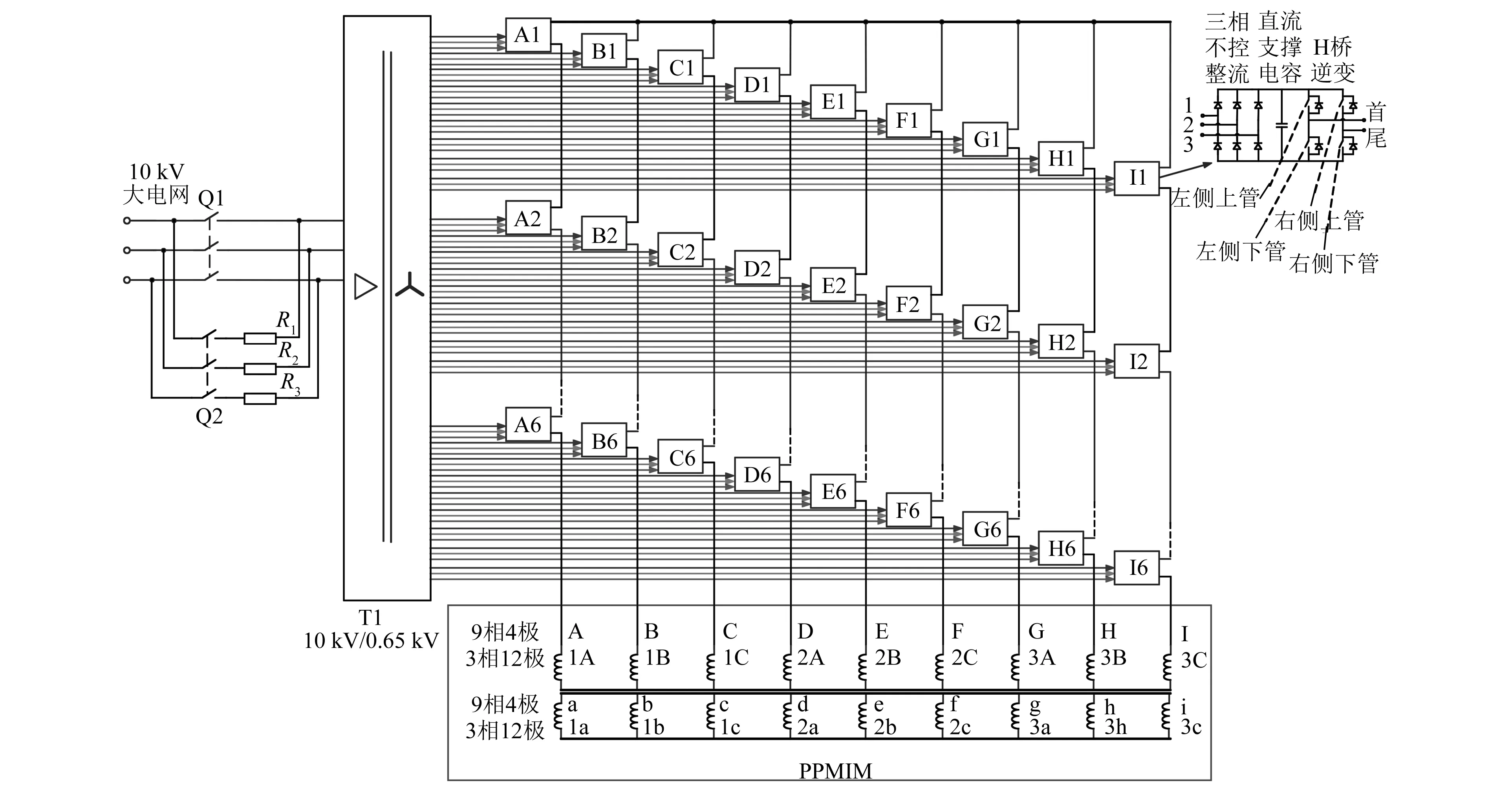
图1 级联H桥多电平变频器拖动极相调制感应电机的主回路结构
当变频器产生相位差为40°的9相交流电源施加在极相调制感应电机定子绕组上时,电机中产生4极磁场,电机就运行在9相4极工况;当变频器产生相位差为120°的3组3相交流电源施加在极相调制感应电机定子绕组上时,电机中产生12极磁场,电机就运行在3相12极工况;当变频器产生9相和3相叠加的混合交流电源施加在极相调制感应电机定子绕组上时,电机中4极磁场和12极磁场共存,电机运行在过渡过程。
2 控制原理
2.1 级联H桥逆变器载波移相正弦波脉宽调制技术
级联H桥多电平变频器中每相由6个功率单元级联而成,其中每个功率单元整流侧为三相不控整流器,用于产生独立的直流电压,而逆变侧为H桥,采用载波移相正弦波脉宽调制技术,产生交流电压,然后6个功率变换单元的逆变侧首尾相连,产生多电平电压。图2为每相采用的载波移相正弦波脉宽调制技术的控制框图。
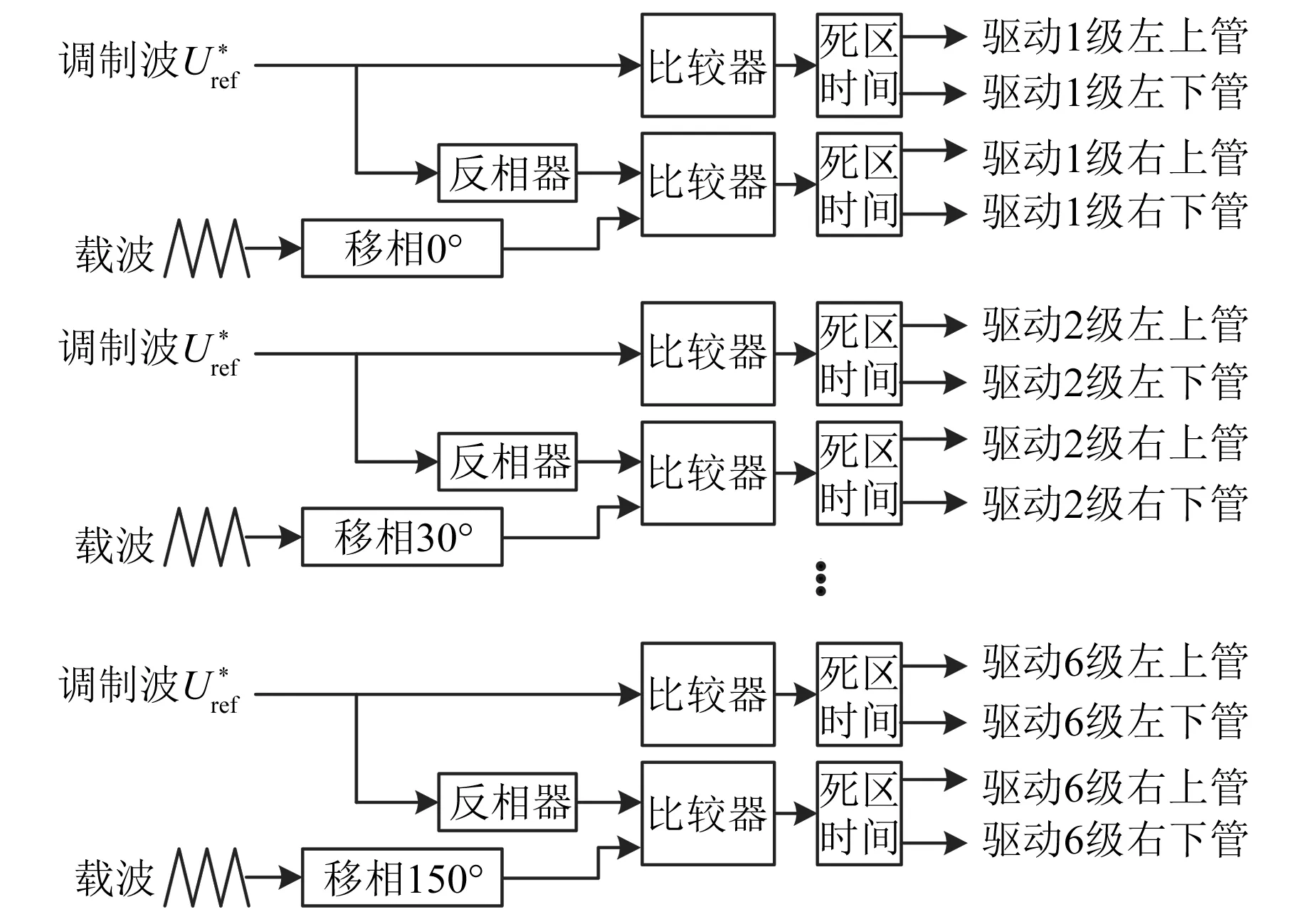
图2 载波移相正弦波脉宽调制控制策略
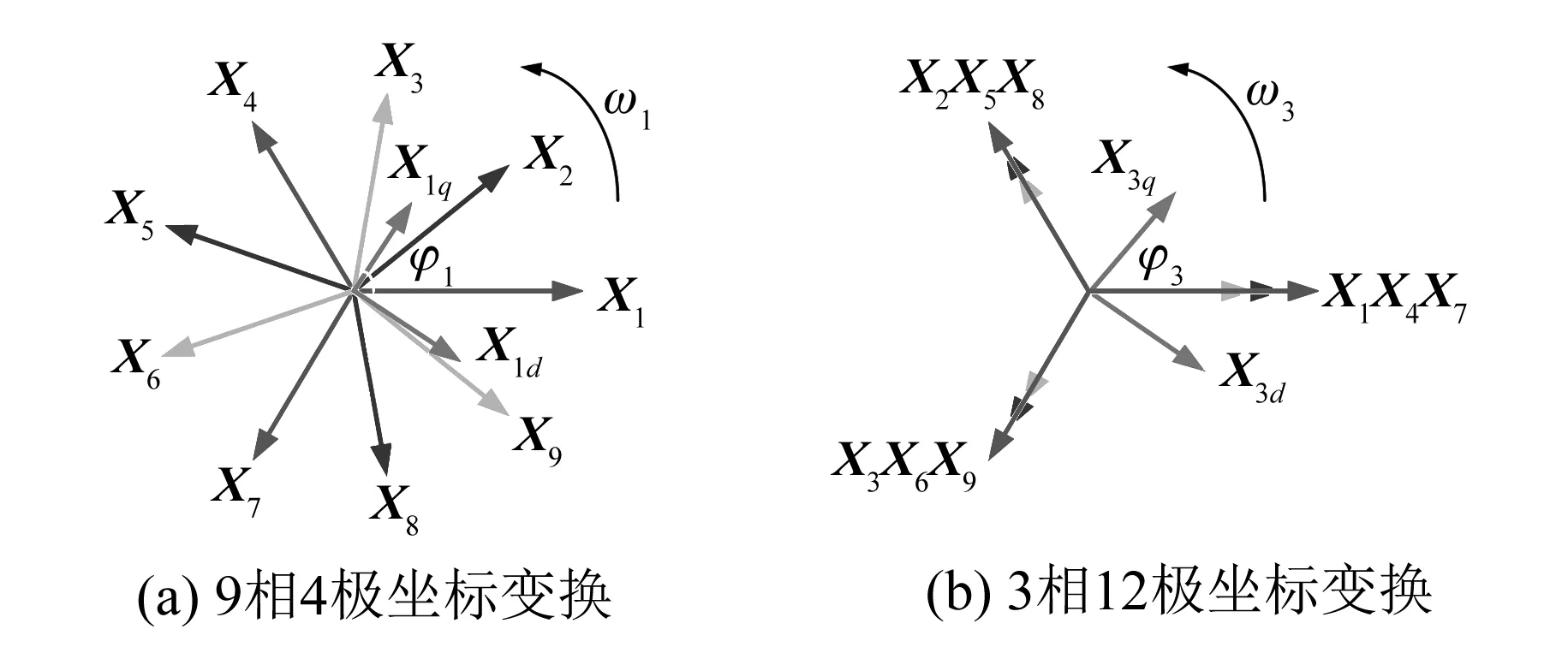
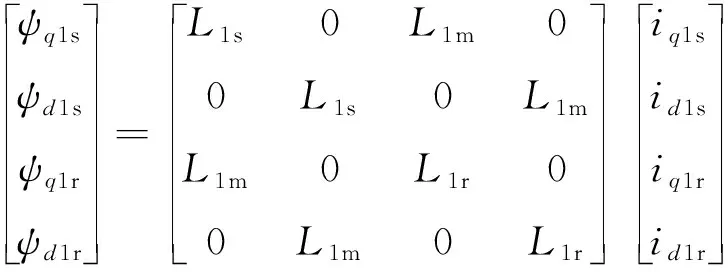
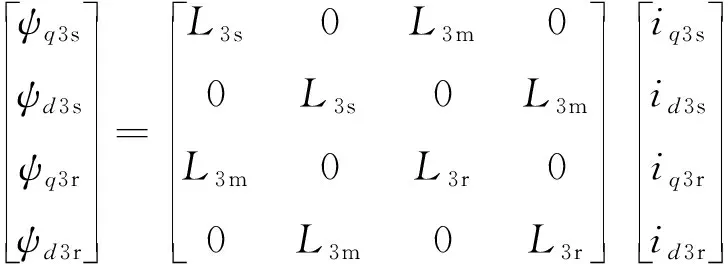
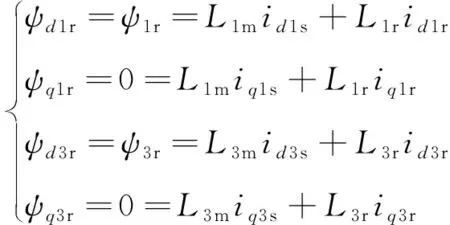
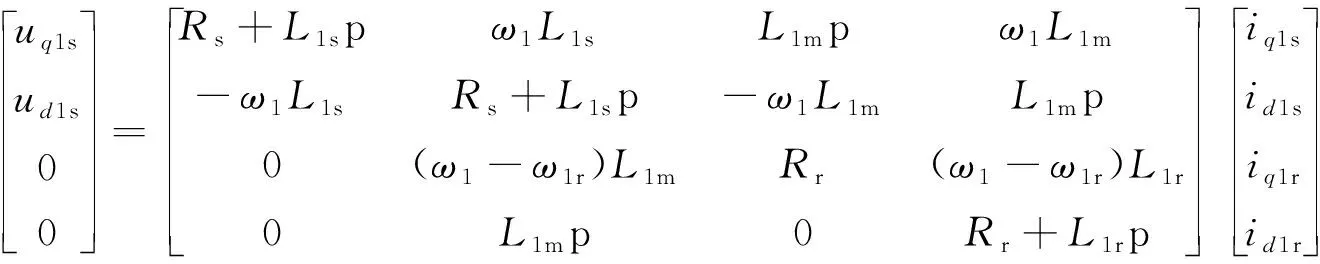
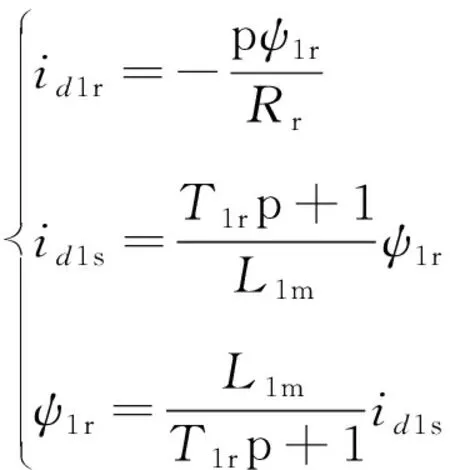
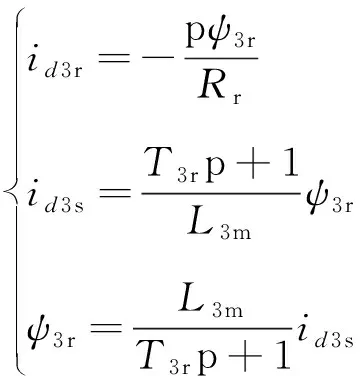
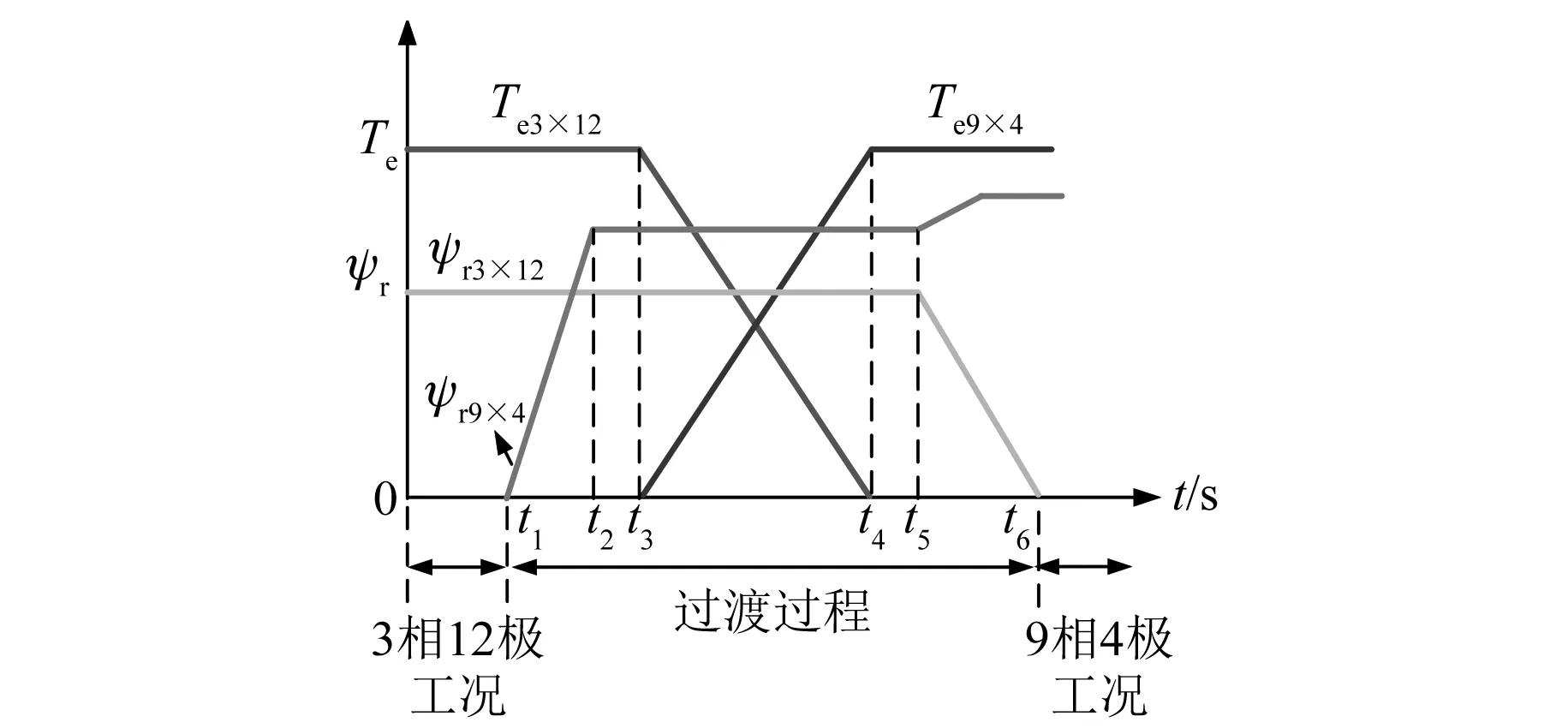
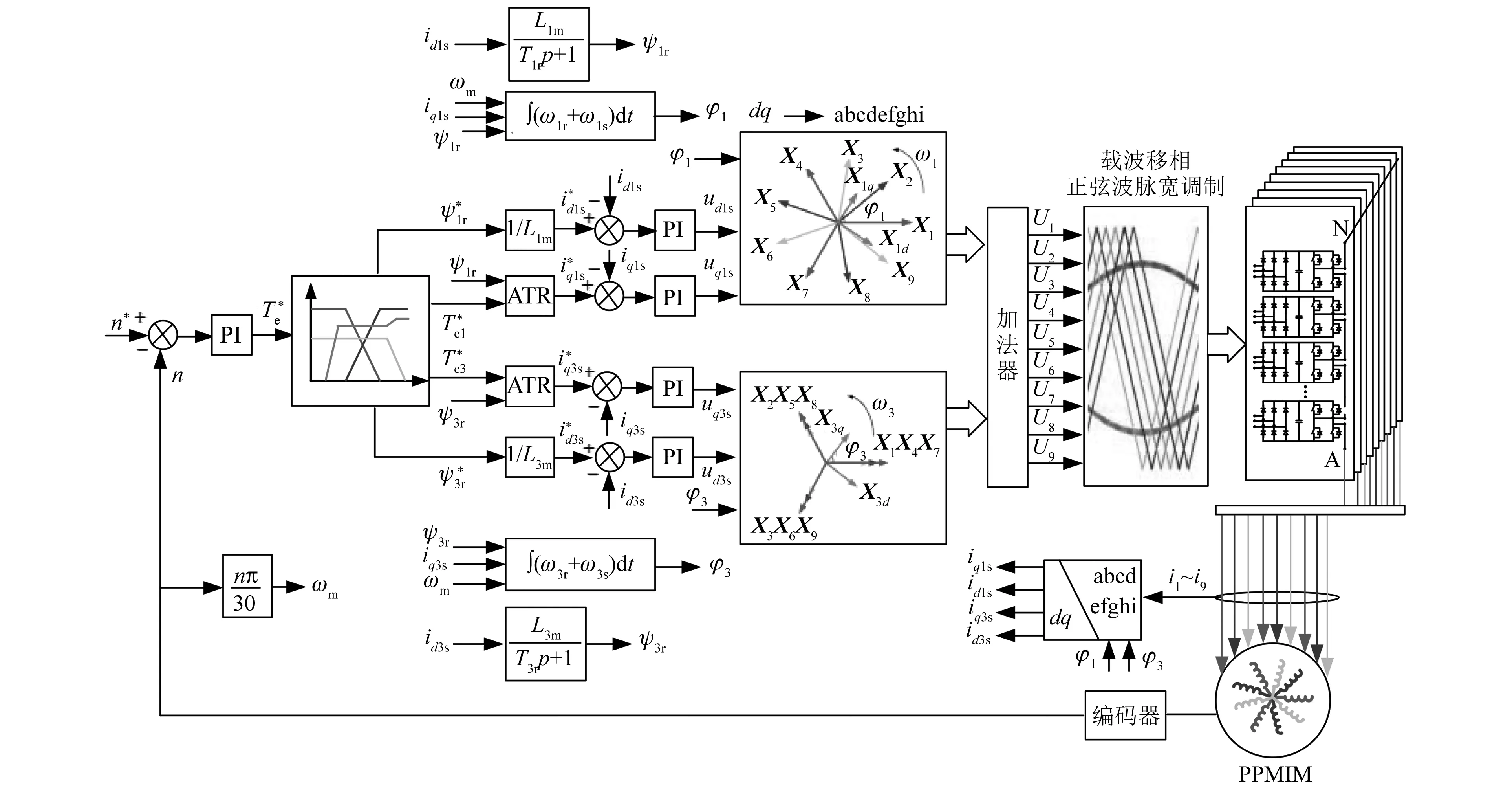
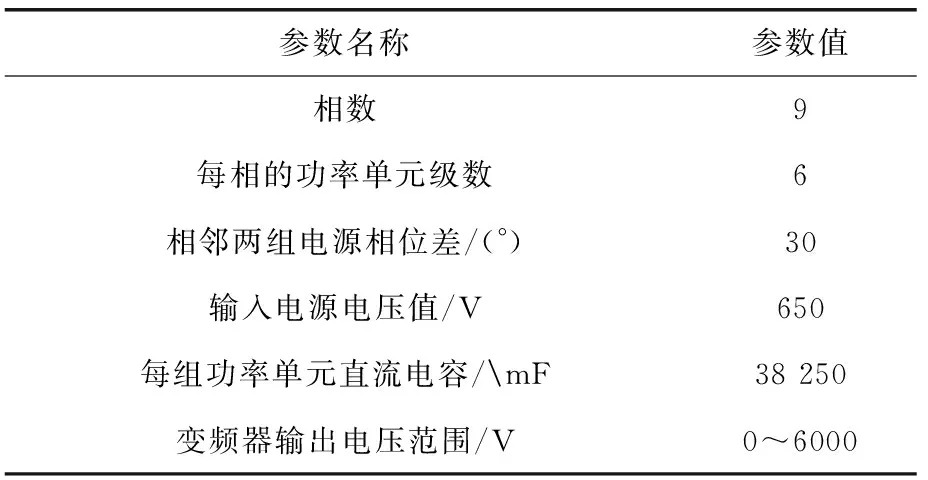
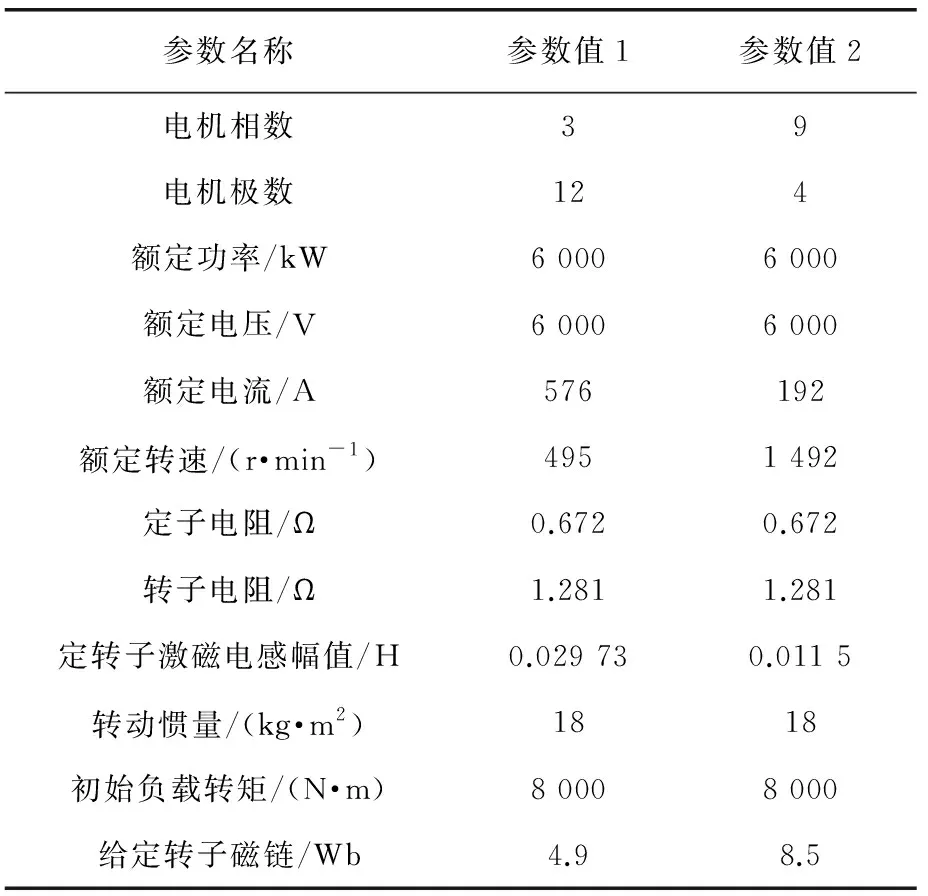
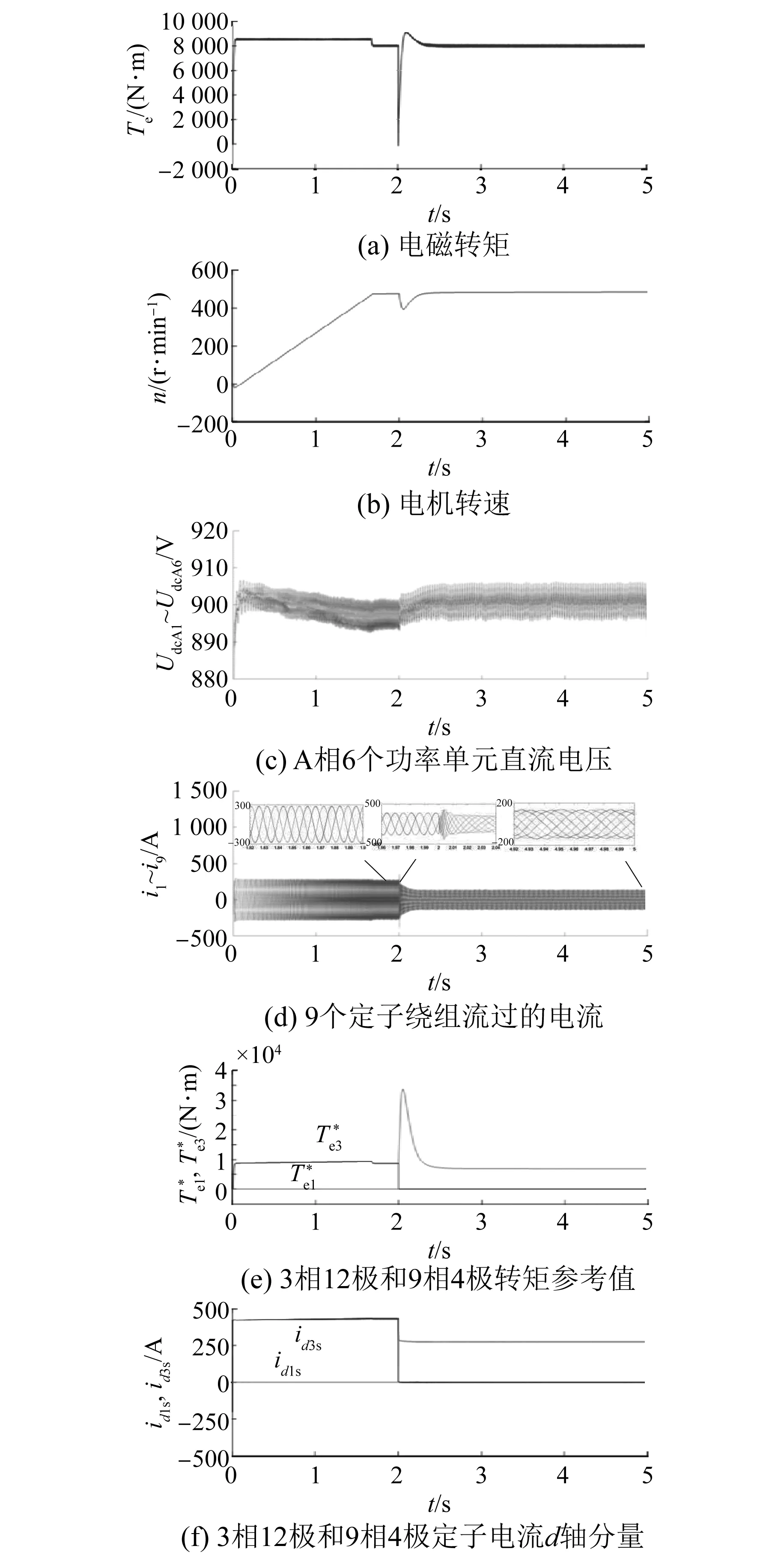
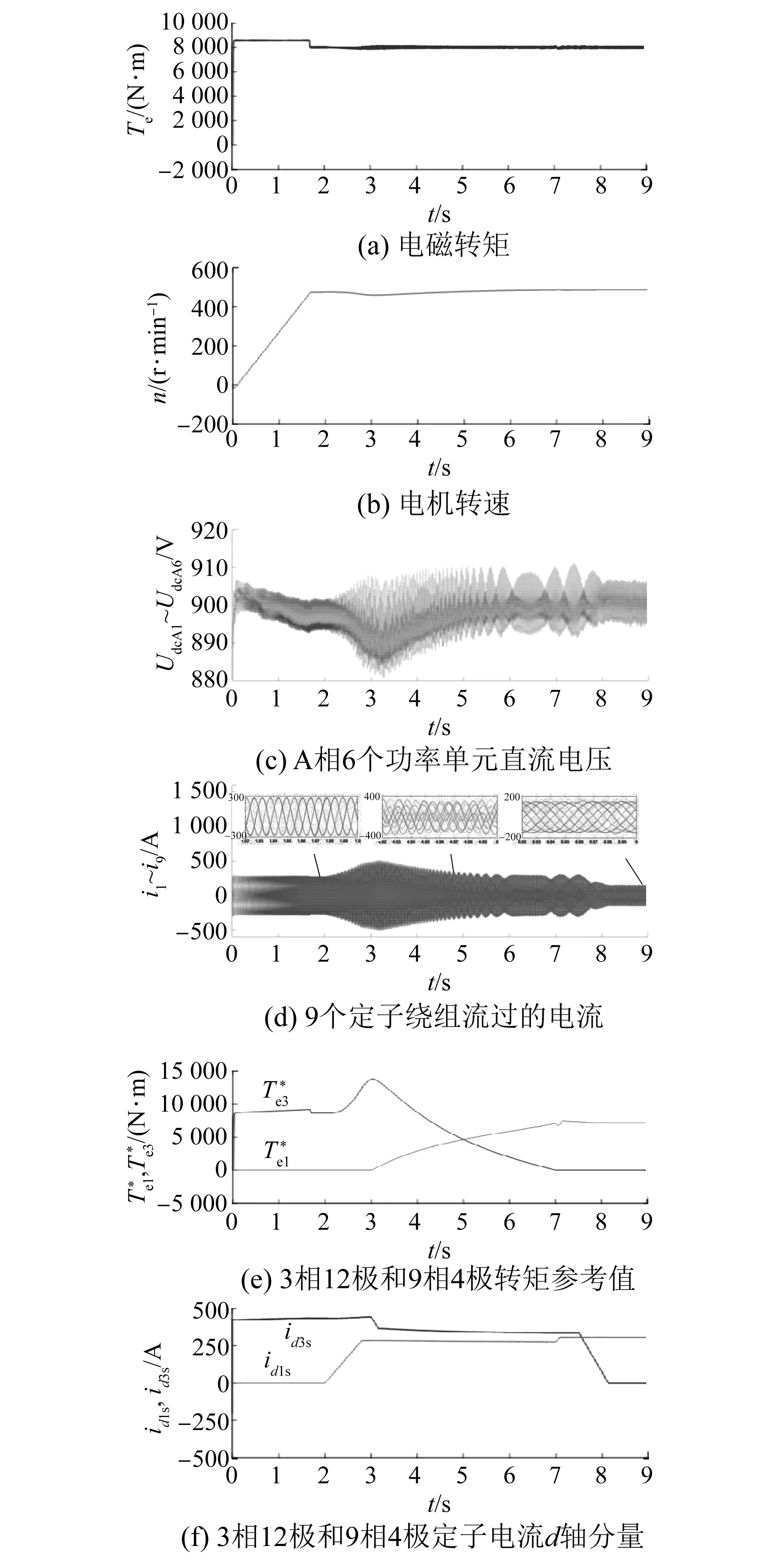
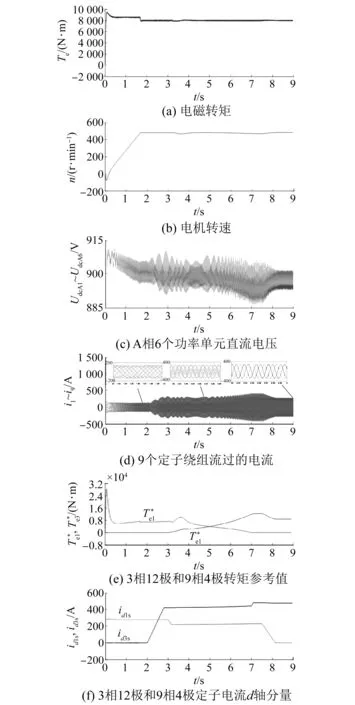
图3为A相6个功率变换单元级联结构的载波移相正弦波脉宽调制。图3中PA、NA为A相6级H桥的公共调制信号,且PA与NA互为相反数;CA1~CA6为第一级至第六级H桥的载波信号,相邻两级相位相差30°;PA和CA1产生第一级H桥左侧上下管触发信号,由图1可知,当PA≥CA1时左侧上管导通,左侧下管关断,当PA 图3 A相6级H桥的载波移相正弦波脉宽调制波形 多极数电机适宜工作在低速大转矩场合,少极数电机适宜工作在高速小转矩场合。极相调制感应电机在变极绕组设计后,在不改变绕组连接方式的条件下,通过给电机绕组提供不同的电源产生不同极数的磁场,从而实现电机的变极运行。本文介绍的极相电机既可以工作在3相12极,又可以工作在9相4极,是一个9绕组结构的感应电机。为了能更准确研究极相调制感应电机的特性,需要分析电机自然坐标系下的数学模型,并准确搭建该电机自然坐标系下的仿真模型。定义定转子电压、电流、磁链如下: (1) 式中:Us、Ur分别为定子电压矩阵、转子电压矩阵;Is、Ir分别为定子电流矩阵、转子电流矩阵,电流方向分别以流入定子、转子为正方向;ψs、ψr分别为定子磁链矩阵、转子磁链矩阵。 定、转子绕组的电阻矩阵为 (2) 式中:rs为定子绕组的电阻;rr为转子绕组的电阻。 定、转子电感矩阵为 (3) 定转子的漏感矩阵 式中:lσs为定子绕组的漏感;lσr为转子绕组的漏感。 电压方程为 (7) 磁链方程为 (8) 转矩方程为 (9) 式中:Te为电磁转矩;I为电流矩阵。 运动方程为 (10) 式中:TL为负载转矩;ωm为电机机械角速度;J为转动惯量。 极相调制感应电机在自然坐标系下的数学模型是多变量强耦合模型,控制非常复杂。本文采用一种合适的等效变换将极相调制感应电机的多相交流磁场系统转换为两个旋转体上的直流磁场系统。其中一个旋转体上两个互相垂直的直流分量X1d、X1q对应于交流系统的9相4极,另一个旋转体上两个互相垂直的直流分量X3d、X3q对应于交流系统的3相12极,X1d、X1q与X3d、X3q无耦合关系,可以独立控制这些直流量。图4为坐标变换示意图。 图4 坐标变换示意图 9绕组极相调制感应电机自然坐标系下变换到同步坐标系下的变换矩阵C为 (11) 式(11)中变换矩阵C的前两行对应q1-d1平面,后两行对应q3-d3平面。 Xq1、Xd1、Xq3、Xd3分别为 (12) 通过变换矩阵C可以将自然坐标系下的电压方程式(7)、磁链方程式(8)、转矩方程式(9)都转换成q1-d1和q3-d3两个独立平面的同步坐标系下的方程。 鼠笼型极相调制感应电机同步坐标系下电压方程: (13) (14) 式中:ud1s、uq1s、id1s、iq1s、id1r、iq1r、L1s、L1r、L1m、ω1、ω1r依次为q1-d1平面下的定子电压d轴分量、定子电压q轴分量、定子电流d轴分量、定子电流q轴分量、转子电流d轴分量、转子电流q轴分量、定子绕组电感值、转子绕组电感值、定子与转子之间的激磁电感值、定子电角速度、转子电角速度;ud3s、uq3s、id3s、iq3s、id3r、iq3r、L3s、L3r、L3m、ω3、ω3r依次为q3-d3平面下的定子电压d轴分量、定子电压q轴分量、定子电流d轴分量、定子电流q轴分量、转子电流d轴分量、转子电流q轴分量、定子绕组电感值、转子绕组电感值、定子与转子之间的激磁电感值、定子电角速度、转子电角速度;p为微分因子。 同步坐标系下磁链方程为 (15) (16) 式中:ψd1s、ψq1s和ψd1r、ψq1r分别为q1-d1平面下定子磁链d轴分量、q轴分量和转子磁链d轴分量、q轴分量;ψd3s、ψq3s和ψd3r、ψq3r分别为q3-d3平面下定子磁链d轴分量、q轴分量和转子磁链d轴分量、q轴分量。 同步坐标系下的转矩方程为 Te=p[L1m(iq1sid1r-id1siq1r)+ 3L3m(iq3sid3r-id3siq3r)] (17) 式中:p为电机极对数。 本文采用转子磁链定向控制方法来控制极相调制感应电机,就是将转子磁链定向于d轴。由式(15)、式(16)可以得到定向后的转子磁链式: (18) 由式(13)、式(14)、式(18)可以得到转子磁链定向后的同步坐标系下的电压方程: (19) (20) 由式(18)的第1行和式(19)的第4行可以得到: (21) 由式(18)的第3行和式(20)的第4行可以得到: (22) 式中:ψ1r、T1r为q1-d1平面下的转子磁链值、转子电路时间常数,T1r=L1r/Rr;ψ3r、T3r为q3-d3平面下的转子磁链值、转子电路时间常数,T3r=L3r/Rr。 由式(15)、式(16)可以看出,转子磁链仅由定子电流的d轴分量(励磁分量)产生,与定子电流的q轴分量(转矩分量)无关。 由式(18)的第2行和式(19)的第3行可以得到: (23) 由式(18)的第4行和式(20)的第3行可以得到: (24) 式中:ω1s、ω3s分别为q1-d1、q3-d3平面下的转差电角速度。 由式(17)和式(18)可以得到转子磁场定向后的同步坐标系下的转矩方程: (25) 由式(23)可得q1-d1平面下的转差方程: (26) 由式(24)可得q3-d3平面下的转差方程: (27) q1-d1平面下转子磁链的相位信号φ1观测方程为 (28) q3-d3平面下转子磁链的相位信号φ3观测方程为 (29) 本文通过转速外环和定子电流内环双环控制,结合转子磁链定向矢量控制策略来控制级联H桥多电平变频器产生电机所需的目标电源,使极相调制感应电机可运行于3相12极工况、9相4极工况、过渡过程工况,从而扩展电机的转矩和转速范围。 当电机需要工作在9相4极工况时,首先需要建立9相4极磁场,对应于q1-d1平面的磁场,同时需要控制q1-d1平面的定子电流d、q轴分量,产生足够的电磁转矩。 当电机需要工作在3相12极工况时,首先需要建立3相12极磁场,对应于q3-d3平面的磁场,同时需要控制q3-d3平面的定子电流d、q轴分量,产生足够的电磁转矩。 当电机需要从3相12极工况切换到9相4极工况时,如果直接切换的话,会出现转矩突然大幅度降低的现象,导致转速下降,这是因为切换前没有建立9相4极磁场,导致切换后,3相12极磁场迅速消失后难以控稳电磁转矩。本文提出的方法为:切换前,控制稳定3相12极对应的励磁电流分量和转矩电流分量来保持3相12极的磁场和转矩稳定,同时给电机注入9相4极对应的励磁电流分量,从而使电机中建立9相4极磁场;然后,将3相12极的转矩电流分量逐渐减小,同时将9相4极的转矩电流分量逐渐增大,直至3相12极的转矩电流分量减小至0,此时9相4极的转矩分量足够大;最后,将3相12极的励磁电流分量逐渐减小,9相4极的励磁电流分量小幅度增大,直至3相12极的励磁电流分量减小至0,此时电机中只有9相4极磁场,而没有3相12极磁场,完成整个过渡过程。过渡过程的磁链和转矩分配如图5所示。同理,可以用这种过渡方法从9相4极工况切换至3相12极工况。转矩和磁链分配函数如图5所示。 图5 转矩和磁链分配函数 极相调制感应电机的控制框图如图6所示。 图6 极相调制感应电机的控制系统框图 为了验证级联H桥多电平变频器拖动极相调制感应电机的变频调速性能,以及极相调制感应电机运行在3相12极工况、9相4极工况、3相12极与9相4极之间的过渡过程的性能,在MATLAB环境中搭建了移相变压器、级联H桥多电平变频器、极相调制感应电机、系统控制等模型。级联H桥多电平变频器参数如表1所示,极相调制感应电机参数如表2所示。 表1 级联H桥多电平变频器参数 表2 极相调制感应电机参数 图7为初始转矩为8 000 N·m,0~2 s极相调制感应电机运行在3相12极工况,2 s时刻直接切换至9相4极工况的仿真波形。 图7 3相12极工况直接切换至9相4极工况的仿真波形 图8为初始转矩为8000 N·m,极相调制感应电机运行在3相12极,采用转矩、磁链分配过渡切换至9相4极的仿真波形,转矩、磁链分配控制原理如图5所示。过程为:0~2 s运行在3相12极工况,2 s开始给电机施加9相4极磁链,3 s开始将3相12极的转矩电流分量逐渐减小,同时将9相4极的转矩电流分量逐渐增大,7 s时小幅度增大9相4极的励磁电流分量,7.5 s时开始将3相12极的励磁电流分量逐渐减小。 图8 3相12极工况过渡切换至9相4极工况的仿真波形 图9为初始转矩为8 000 N·m,极相调制感应电机运行在9相4极,采用转矩、磁链分配过渡切换至3相12极的仿真波形,转矩、磁链分配控制原理与图5同理。过程为:0~2 s运行在9相4极工况,2 s开始给电机施加3相12极磁链,3 s开始将9相4极的转矩电流分量逐渐减小,同时将3相12极的转矩电流分量逐渐增大,7 s时小幅度增大3相12极的励磁电流分量,7.5 s时开始将9相4极的励磁电流分量逐渐减小。 图9 9相4极工况过渡切换至3相12极工况的仿真波形 由图7(a)可知,3相12极工况直接切换至9相4极工况时,电磁转矩会降低至0左右,造成定子电流的冲击和转速的降低,如图7(d)所示,这样会给电机造成一定的影响。由图8和图9可知,采用转矩和磁链分配的过渡过程切换方式[图8(e)和图8(f)的控制反馈波形与图5控制一致,图9(e)和图9(f)的控制反馈波形与图5控制同理],无论是3相12极工况过渡至9相4极工况,还是9相4极工况过渡至3相12极工况,转矩均没有较大的降低现象,如图8(a)和图9(a)所示,转速比较平稳,如图8(b)和图9(b)所示,定子电流冲击也较小,如图8(d)和图9(d)所示。可以看出过渡过程切换比直接切换方式对电机更加有利。由图8(d)和图9(d)可以看出采用级联H桥多电平变频器拖动电机时,定子电流谐波含量较小,正弦度较高。另外,仿真结果也表明了文中提出的级联H桥多电平变频器采用转子磁链定向控制和极相调制矢量控制策略能够拖动极相调制感应电机进行变频调速和极相调制运行。 本文介绍了一种级联H桥多电平变频器以及一种定子绕组可配置为9相4极和3相12极的极相调制感应电机,并介绍了级联H桥多电平变频器的载波移相正弦波脉宽调制技术,以及极相调制感应电机的数学模型、转子磁场定向控制、极相调制矢量控制等。通过仿真验证了级联H桥多电平变频器能够满足极相调制感应电机的变频调速性能和极相调制矢量控制性能,可为新能源发电、船舶推进、工业传动等高压大功率领域提供技术保障。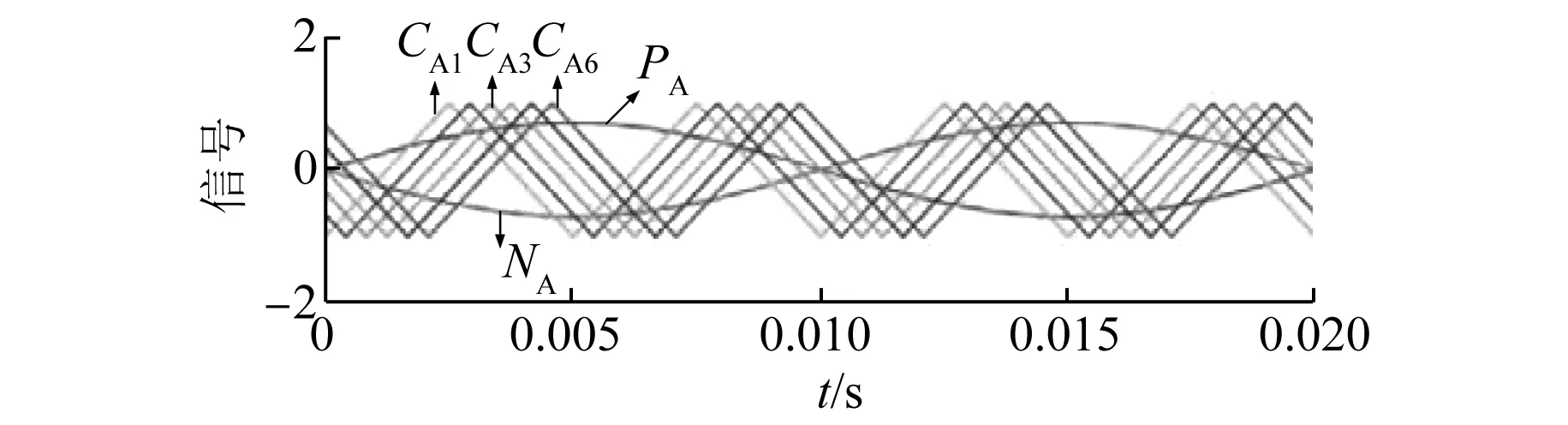
2.2 极相调制感应电机的数学模型






2.3 转子磁链定向控制


2.4 极相调制矢量控制
3 仿真与结果分析
4 结 语
