青藏高原高海拔—难进入地区无人机地质调查试验研究与应用展望
2022-08-02郑明宋扬唐菊兴刘治博胡广胜胡懿灵
郑明,宋扬,唐菊兴,刘治博,胡广胜,胡懿灵
1)国土资源部成矿作用与资源评价重点实验室,中国地质科学院矿产资源研究所,北京,100037;2)合肥工业大学资源与环境工程学院,合肥,230009
内容提要: 青藏高原空气稀薄、气候恶劣、环境脆弱,是世界海拔最高、面积最大、地质构造最为复杂的地区,被称为世界第三极和造山的高原,属于全球典型的高海拔—难进入地区,传统的地质工作方法受到一定制约。笔者等首次将无人机引入海拔5000 m的藏北高原开展地质调查工作,探索研发无人机地质填图技术。通过5种不同类型无人机填图飞行试验,笔者等认为固定翼和旋翼无人机经螺旋桨、机身机翼以及倾斜摄影平台升级后可用于高海拔—难进入地区的大—中等比例尺(1∶50000至1∶1000)区域地质调查等地学领域野外作业。改进后的无人机理论寿命更长、飞行更加平稳、影像质量大幅提升。经实地飞行试验和野外校验,无人机获得的影像数据精度优于遥感卫星,局部精度最高可达3 cm,各地质体接触关系及纹理清晰明显,地质解译效果好,总体正确率高于95%。无人机地质填图技术具有成本低、数据获取快速、空间分辨率高、搭载设备类型多样等优势,在未来可与大数据、移动互联网、人工智能、虚拟现实技术结合创建一种安全、多维度、高精度虚拟地质作业平台,满足个性化、智能化、实时化、精确化的地质矿产工作需求。
无人机(Unmanned Aerial Vehicle,UAV)是一种可搭载多种任务设备、利用无线电遥控设备或预编程序自主控制飞行的无人驾驶飞行器。自1917年世界上第一架无线电控制的无人飞行器诞生以来,经过百年的发展,现今无人机测绘具有高分辨率、针对性强、体积小、使用方便、造价低等特点,是对传统航空摄影测量和卫星遥感技术的有效补充(Colomina et al., 2014;王佩佩,2020;张继贤等,2021;Colica et al., 2021)。在巨大的市场需求下,无人机在国内外农业植保、电力巡检、水利交通、抗震救灾、环境检测和国土资源等领域得到很好应用(图1;Li Peng et al., 2015;贾曙光等,2018;Lian Xugang et al., 2020;王颂等,2020;张浩伟,2020;Torok et al., 2020;Quan Xiuhao et al., 2021;管涛等,2021),极大地提升了生产服务的质量和效率。目前,无人机在地质领域内小范围应用,包括地表形变分析(Bonali et al., 2019)、构造裂隙统计(Torok et al., 2020;Colica et al., 2021;Fernández-Lozano et al., 2021)、区域地质调查(Tziavou et al., 2018;Moreira et al., 2021;张继贤等,2021)、活动断层识别(Gao Mingxing et al., 2017)、数字矿山建设(程红,2015)。中国无人机的产业发展起步较晚,20世纪50年代中国正式开始研制无人机,60年代生产出了低速遥控靶机,70~80年代成功研制了“长虹”以及“长空1号”无人机。20世纪90年代,中国测绘科学研究院开始民用测绘无人机的研制。直到21世纪以后,中国的无人机工业才进入了飞速发展的阶段,但仍以军用主(晏磊等,2019)。在我国,由中国地质调查局相关单位研制的“彩虹”系列中型无人机航空地球物理综合测量系统,已具备在青藏高原实现航空物探测量的能力,但轻小型无人机技术服务于青藏高原基础地质工作的实例鲜有报道。
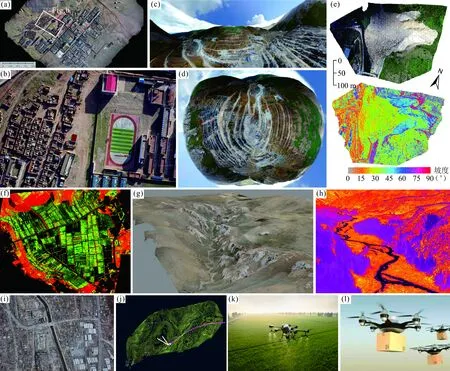
图1 无人机应用实例Fig. 1 UAV (Unmanned Aerial Vehicle) application example(a)、(b)西藏双湖县城固定翼无人机航空正射影像图;(c)、(d)西藏甲玛矿区四旋翼无人机航空全景影像图;(e)地质灾害预警;(f)机载高光谱;(g)三维地形;(h)热红外成像;(i)抢险救灾;(j)地形测绘;(k)农业植保;(l)物流(a), (b) DOMs of the Shuanghu county in Xizang(Tibet) produced by images of fixed wing UAV; (c), (d) panoramic images of the Jiama mining area in Xizang produced by images of quad-rotor UAV; (e) early warning for geological disasters; (f) hyperSpectral UAV; (g) 3D terrain mapping; (h) UAV-based thermal infrared imaging; (i) emergency rescue and disaster relief; (j) topographic mapping; (k) agricultural plant protection; (l) logistics
中国地质科学院矿产资源研究所自2015年起,组织实施“西藏班公湖—怒江成矿带资源基地调查”和“藏西北铜多金属资源基地综合调查评价”地质调查项目,开展高海拔、难进入地区的地质矿产调查工作新技术、新方法的创新,首次在海拔5000 m的藏北高原开展无人机地质填图试验,并获成功。本文介绍了项目组运用多种无人机类型在高海拔地区地质填图技术中的探索,总结高海拔、难进入地区无人机硬件配置及服务地质领域的实践经验,并面向人工智能、大数据、物联网、云计算等技术背景对高海拔、难进入地区轻小型无人机地质填图技术的应用进行展望。
1 无人机技术发展及应用
1.1 无人机技术发展
20世纪60年代美国率先将无人机(Unmanned Aerial Vehicle,UAV)技术应用于军事侦察领域(Gupta et al., 2013),1979~1980年Przybilla和Wester-Ebbinghaus首次进行了旋翼无人机航空摄影作业(Colomina et al., 2014)。2004~2006年,美国国家航空航天局(NASA)就对民用无人驾驶飞行器的能力进行评估。美国内政部发布的“美国无人机地质调查系统(UAS)规划2014”要求在广阔的土地上获取遥感数据,包括偏远和有潜在危险的地区(Cress et al., 2015)。欧盟在2007年对无人机的使用领域进行了分析,并认为对地观测与遥感是一个重要的应用方向。2018年发布的《欧洲地理空间产业展望报告》在GNSS与定位、GIS与空间分析、遥感3个类别的基础上,增加了三维扫描,并预测该方向成为4个分类中增长最快的市场,将进一步推动无人机实景三维的发展。在俄罗斯、日本、加拿大等国家也大力发展基于无人机的遥感技术(张继贤等,2021)。
“十五”期间科技部等部门开始支持民用无人机遥感系统技术,并于2005年开始了我国高端无人机遥感系统产业化进程(晏磊等,2019)。“十一五”以来,科技部在“地球观测与导航领域”支持的“863”计划重点项目、重点研发计划项目、科技支撑项目等与无人机直接相关项目7项,间接相关项目4项,占该领域总项目数的20%。2015年发布的《全国基础测绘中长期规划纲要(2015~2030年)》要求重点推进激光、雷达、倾斜摄影等新型传感器数据获取与应用。“十三五”期间,科技部其他重大专项、相关部委科技立项也大量涉及无人机遥感。2016年国家测绘地理信息局发布的《关于进一步加强应急测绘保障服务能力建设的意见》,明确指出将无人机航空遥感平台构建、多类型传感器集成以及地面指挥控制平台配备等作为主要建设任务(张继贤等,2021)。国内消费级无人机市场自2012年开始出现了爆炸性增长,以大疆为代表的一批高新科技公司将多旋翼的无人机飞行平台推向世界消费级无人机市场。
无人机飞行系统通常由飞行平台、飞控系统、地面监控系统、遥控遥测链路以及载荷等组成(张继贤等,2021)。现阶段,飞行平台及载荷种类发展较快,可选设备较多。受载荷、续航时间、操控复杂度、地域限制等因素的影响,常用的无人机飞行平台主要为轻小型固定翼、多旋翼等机型。伴随着轻小型无人机飞行平台的发展,涌现了大量适用于轻小型无人机的载荷,如高分辨率相机、可见光高分辨相机、红外摄像机、高光谱、多光谱设备、航空物探设备、合成孔径雷达(SAR)以及激光雷达(LIDAR)等。目前,基于无人机的遥感数据解译、矿山地质灾害危险源识别、地质灾害调查及评估、航空地球物理测量、生态环境监测和气候变化等方面正成为众多学者研究的热点内容(周文生等,2014;Lucieer et al., 2014;Valkaniotis et al., 2018;贾曙光等,2018;吕剑,2019;王超,2019;梁峻铭,2020;王佩佩,2020;Aurell et al., 2021;Colica et al., 2021)。Lucieer等(2014)利用无人机开展极地苔藓健康状况和水质评估;黄皓中等(2017)在北京市门头沟区运用无人机遥感数据建立了一套适用于矿山的无人机遥感的地质灾害解译方法流程,矿山地质环境调查、地质灾害调查及评估;王俊豪等(2021)基于无人机倾斜摄影影像和飞控数据,对黄土地区地质灾害调查与评估进行了有益的探索;洪运富等(2015)研究了无人机平台与载荷搭配(可见光与热红外)技术,评估了南水北调东线工程源头输水水域内存在的多个污染源,为地区水源地环境监管和水质监测提出了有利的建议;Aurell等(2021)使用无人机系统,获取在规定用火中的火烧强度和排放数据并进行分析;Zhang Minghu等(2020)利用自主研发的无人机物联网中继系统,实现了无公网覆盖偏远地区实时数据采集,可用于采集青藏高原等偏远地区环境监测设备数据。
1.2 无人机地质调查现状
地质调查是获取基础地质信息的重要手段,为国土规划、矿产普查、水文、工程、环境地质勘查、地质科研教学等提供“第一手”地质资料。传统1∶5万及更大比例尺地质填图工作,一般要求点、线、面相结合,详尽查明区内地质特征。通过详细的填图可以最大程度反映地质情况,但也存在诸多不便,如经费投入高,人员投入大、野外工作时限长、安全隐患多等。尤其是在自然环境恶劣的高海拔—难进入地区,地质调查对地质科研工作方式提出了更高的要求。将无人机技术引入地质调查在国外已有实例,如俄罗斯天然气工业石油公司开发可用于地球物理勘查作业的新一代超远程无人机,可以在具有挑战性气候条件的北极和俄罗斯远东等无法进入地区使用;美国内政部发布的“美国无人机地质调查系统(UAS)规划2014”要求在广阔的土地上获取遥感数据,包括偏远和有潜在危险的地区(Cress et al., 2015);智利摄影测量服务商WSdata3D使用轻小型固定翼无人机对智利北部一个大型铜矿进行测绘,短时间高效率地完成了出铜量的测算。
2 无人机填图试验技术流程及飞行条件
2.1 试验技术流程
数据处理与数据质量影响着解译标志建立的可靠程度。本次无人机地质填图试验流程主要有机型选择、数据获取、数据预处理、数据后处理(易柳城,2013;王娟娟等,2019;秦玉刚等,2020)及地质解译(图2),后期三维成图采用smart3D进行无人机大比例尺填图的实景建设。现有的倾斜拍摄设备一般适用于建筑物等形状规则的拍摄对象,当在西藏高海拔地区进行地质填图时,所航拍的山体、岩石、土地等不规则对象的精度受环境气候等因素较大,对无人机平稳飞行以及机载设备成像均有不利的影响,往往难以获得准确的模型。
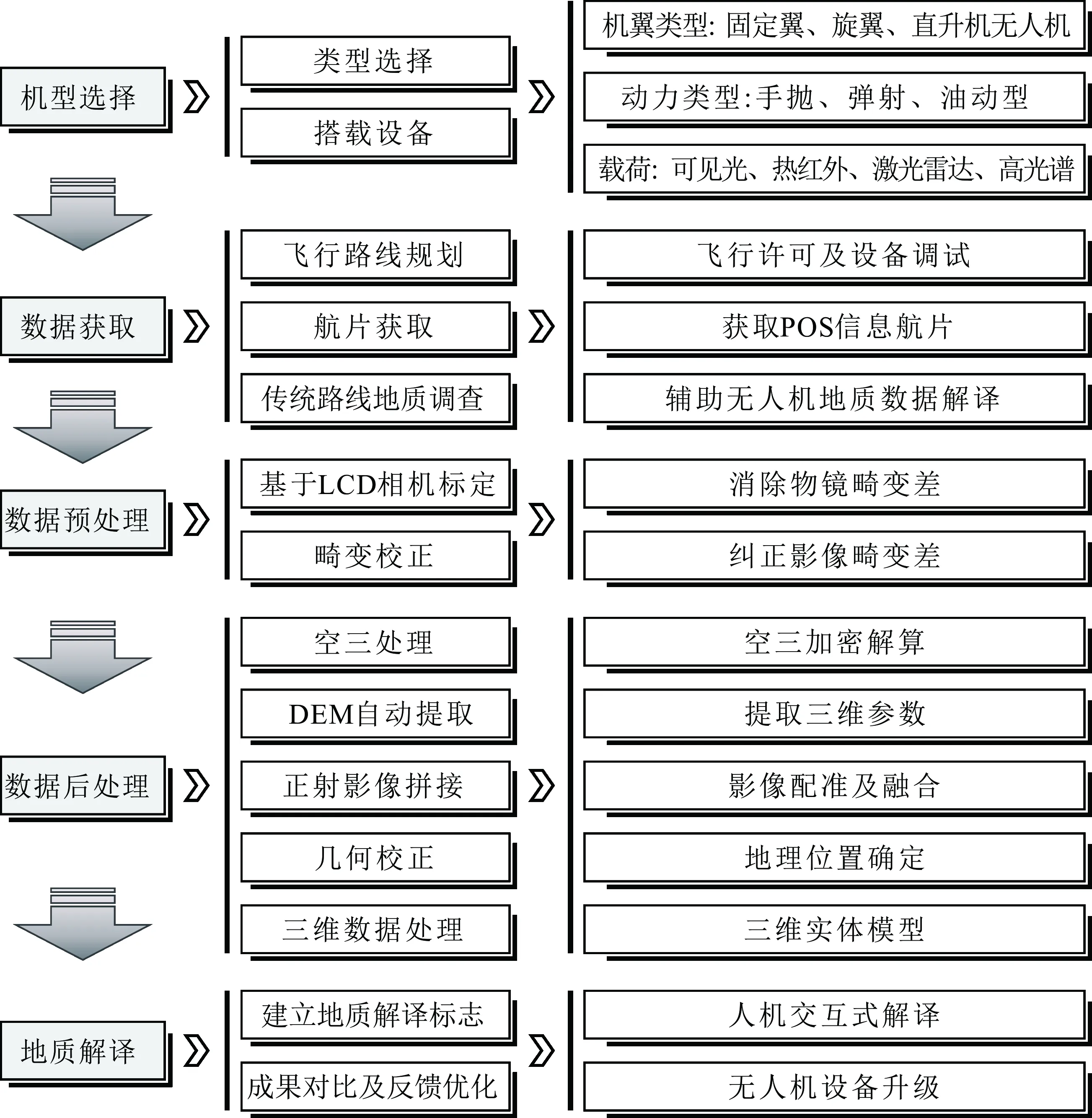
图2 无人机地质填图试验技术流程Fig. 2 Flowchart of the UAV-Based geological mapping methodology employed in this paper
为更好地提升地质解译成果的可靠程度,笔者等在数据处理至数据解译全过程中使用以下手段严格把控数据质量:①数据预处理阶段:采用基于LCD相机标定方法进行相机校验,另外应进行航拍影像进行畸变差修订(图2);②数据后处理阶段:在空三处理、DEM自动提取和正射影像拼接流程后,需要用控制点或已存在的大比例尺图件对图像进行几何校正(图2);③设备升级:为提升不同型号无人机及不同机载设备的成像精度,本次无人机试验填图亦开展了无人机设备升级的研究,如机身、机翼、动力系统和航拍系统的改进;④辅助校验:除无人机填图作业外,在试验的重点地区开展放稀密度的路线地质调查,以期辅助野外校验,保证无人机试验数据质量和地质解译的可靠性。
通过ETM+遥感影像与无人机正射影像、三维模型图的对比,无人机数据有着更大的优势,无人机机动灵活的属性,便于进行野外作业。比起卫星遥感数据,无人机高分辨率影像更容易清晰的界定各个地质单元的界限,在地质调查工作中具有较大的便利性。
2.2 飞行条件
与我国平原、丘陵地区不同,青藏高原地区具有高海拔、低气温、低空气密度、环境恶劣、后勤保障困难等特点。轻小型无人机在高原飞行作业受限于多种因素:
(1)气候条件。据推算,海拔高度每上升100 m,年均温降低0.57℃。本次工作区地处藏北高原,海拔高、气温低、空气密度约为平原地区的50%、大风天气较多,增加了无人机飞行的难度。
(2)空气密度条件。无人机飞行状况很少提及的空气密度问题,是因为目前无人机多在平原地区作业。但在高原地区,空气密度是影响无人机飞行作业成功与否的巨大因素。据测算,高原地区海拔4000 m高度上,相对空气密度约为65.3%,海拔5000 m高度上,相对空气密度约为58.3%。空气稀薄环境下,要求飞行器的螺旋桨转速更高,稳定性更强,才能保证起飞、飞行以及降落阶段的安全。同时,由于空气密度较低,将要求飞行器保持更高的转速,导致飞行器的耗电量加大,影响无人机作业时长。
(3)场地飞行条件。高原地区交通状况相对较差,物资及材料运输不便,通讯状况亦有较大限制,导致无人机设备维护保养、电力供应不完善。无人机飞行时容易受到其它信号源、恶劣天气及复杂地形的干扰,导致其操纵性能大大降低。目前的解决手段包括使用新型高密度可充电电池延长飞行时间、架设无人机地面移动中继站及信号增强天线扩大提高飞行范围及操纵性能。本次工作区内无网络通讯,无人机操控地面站软件必须预先加载好测区范围的离线地图方便进场后规划航线和监控飞机。

图3 无人机地质填图试验区位置图Fig. 3 Location of the UAV geological mapping testing area
3 无人机飞行试验效果
3.1 试验区自然地理
试验地区地处青藏高原腹地、羌塘盆地南缘、西藏自治区的西北部,行政区划隶属西藏那曲地区双湖县管辖(图3)。测区内由于地势特高,气候分区为羌塘高原亚寒带半干旱气候区,属典型大陆性气候,具有干燥、寒冷、低压、风大、日照时间长、降水量集中、蒸发量大于降水量和严重缺氧的特点。
区内年平均气温0℃以下,最低气温 -33.8℃,最热为7月,平均气温12℃。月平均气压596.3 mbar(相当于0.604标准大气压)。年降水量为127 mm,6月至7月约占全年降水量的93%,平均年蒸发量为2427.90 mm。年平均风速为4.6 m/s,每年风速等于或大于17 m/s的日数超过200 d。天气变化无常,时而晴空万里,时而浓云密布,狂风大作,冰雪交加。工作区交通条件差,距拉萨市约600 km。工作区地处藏北高原湖盆区,地势相对起伏不大,以高原丘陵为主,平均海拔4800 m,试验区海拔约5000 m,空气含氧量仅为内地的40%。
3.2 机型及载荷选择
为更好地验证何种无人机机型适用于高海拔地区的地质调查工作,本次验证飞行的无人机类型有(图4a—e,表1):多旋翼无人机(四旋翼蜻蜓5S正摄与倾斜摄影系统)、轻质手抛/弹射固定翼无人机(胖妞)、微型手抛固定翼无人机(瑞士SenseFly eBee)、油动无人机(锐翔SR40,定制机身及动力机构)。根据不同区域地质调查场景需求,挂载倾斜摄影设备或高分辨率相机进行数据收集。
由于工作区位于空气稀薄的高海拔地区,大型油动无人机的二冲程汽油发动机难以正常运转,所以不适合应用于此次无人机填图验证飞行。另外受工作区地形限制,要求无人机能够在相对局限的范围内进行起飞和降落,所以在降落过程中需进行长距离滑行降落的无人机亦不适用于此次无人机填图验证飞行。根据实际飞行验证,结合野外实际情况,总结出可用于地质调查工作的无人机主要为固定翼无人机和多旋翼无人机。
(1)固定翼无人机(具备伞降能力)。该无人机具有续航时间长、有效载荷大、升限高、飞行姿态稳定且方便维护的特点,可以承担较远距离、较大面积的航拍工作。在地质调查工作中,适合挂载倾斜摄影设备或高分辨率相机,进行地表扫面工作。但固定翼无人机通常对起降场地条件要求高,比如滑跑起降时需要宽阔平直的场地以及较好的净空条件等,导致该类型无人机平台在山区等地形复杂区域使用受限(张继贤等,2021)。可伞降的轻质手抛起飞固定翼无人机的出现或可解决此类机型狭小空间起降受限的难题。
(2)多旋翼无人机。该类型无人机可近距离拍摄目标,具有垂直起降、自动驾驶、载重量适中、定点悬停、定点环绕、超低空飞行、可悬停拍摄高清影像等特点。适合的地质调查应用场景为超视距的、不可进入或难进入的重点地质区或地质点位的踏勘及验证查看(Tziavou et al., 2018;Colica et al., 2021)。多旋翼无人机可搭载高分辨率数码相机、倾斜摄影相机和激光雷达等传感器,并制作高精度、高分辨测绘产品,尤其是在山地地形、高楼、电塔巡检等高度快速变化的复杂场景发挥了重要作用。但目前常用的电动旋翼无人机续航时间通常不超过1 h,尤其是在超过500 m相对高度作业时,飞行器快速爬升对电力的消耗极大,这成为限制旋翼无人机发挥更大作用的主要因素(张继贤等,2021)。
3.3 数据获取及成图效果

图5 成图效果Fig. 5 The UAV-based DOM and 3D model(a)—(c)正射影像;(d)三维模型。∑—超基性岩;J3t—上侏罗统吐卡日组;K2j—上白垩统竟柱山组;Qhpal—第四系冲洪积物(a) —(c) DOM; (d) 3D model. ∑—ultrabasic rocks; J3t—the Tukari Formation; K2j—the Jingzhushan Formation; Qhpal—Holocene
本次工作无人机填图扫面数据采集使用胖妞固定翼无人机。该无人机的优点是机身内空间大,便于搭载进行图像获取的相机等工具。内置锂聚合物电池拥有350 W·h/kg相当高的能量密度和超强的放电能力,高达25C的放电能力,保证了飞机的航程满足作业需求和起飞降落阶段的大功率能耗需求。外转子无刷电机双发前拉的动力系统布局使得无人机拥有充沛的动力应对空气稀薄环境下的起降和突发情况。无人机采用了进口的新型材料EPO+碳纤维复合材料结合,这样减轻了飞机的起飞重量的同时保证飞机具备足够的强度和刚度。定点数据采集使用蜻蜓5S四旋翼正摄与倾斜摄影系统进行数据采集,针对工作区重要地质体及地质现象进行影像数据采集。
胖妞固定翼无人机上搭载的相机型号为SONY a7R M2全画幅4230万像素相机搭配蔡司35 mm / f 2.8定焦镜头,相机经过校验标定处理符合行业规范。通过运动模糊的计算,20 m/s的飞行速度拍摄设置为:S档快门优先,快门速度1/1250 s,ISO根据光照情况在300 ~ 640之间合理选择,避免因为飞机飞行导致运动模糊超过1个像元而产生影像发虚的现象。因指定了多个验证飞行区,飞行设计航向因地制宜,旁向及航向重叠率均设置为75%,设定飞行绝对高度240 ~ 420 m,保证最低处分辨率优于6 cm(最高4.65 cm),采集了近2000张带有POS数据的高分辨率航片。
倾斜摄影系统由传感器、集成GPS/IMU惯导模块和时间同步模块三部分组成。传感器通常由3镜头或5镜头组成,镜头可由垂直、倾斜等不同方向与视角组合,通过时间同步模块控制不同角度下同一曝光点目标的数据。下视镜头位于中间位置,用于采集正射影像,其四周环绕2个或4个侧视镜头,以40°朝向不同方向。利用集成GPS/IMU传感器获取曝光时刻影像的位置数据与姿态数据。
本次试验搭载两排相机组成的5S倾斜摄影设备,第一排并列分布3个镜头,中间镜头为正射向下,另外两个侧视镜头与下视镜头视角为30°;第二排的两个侧视镜头分别以30°倾角旋转分布,所有镜头采用有效像素3600万的CMOS传感器构成(图4f,表1)。数据处理主要由inpho、pix4d、smart3d实现正射影像拼接、数字正射影像图(digital orthophoto map,DOM)生成及三维地质体建模工作(图5)。
3.4 硬件升级
按照上述无人机飞行试验技术流程要求,笔者等进行了多机型、多环境、多目标的验证飞行,旨在详尽评价无人机在西藏高海拔难进入地区开展作业的可行性。根据验证飞行结果,影响高原无人机作业性能和数据质量的因素有:①气候环境因素。无人机作业过程中,受局部气流扰动导致无人机飞行姿态不稳,使得无人机采集的数据质量较差,影响DOM和三维模型的精度;②高原强光照(紫外线)因素。高原地区紫外线强度高,使得机身和设备老化加快,寿命降低;③目标形状因素。
现有的倾斜拍摄设备一般适用于建筑物等形状规则的拍摄对象,当在西藏高海拔地区进行野外地质填图时,针对山体、岩石、土地等不规则野外航拍对象,西藏高海拔地区的环境气候因素对无人机平稳飞行以及机载设备成像均有不利的影响,往往难以获得准确的模型。为提升不同型号无人机及不同机载设备的成像精度,笔者等尝试性地开展了无人机设备升级研究。
3.4.1旋翼无人机螺旋桨改进
无人机螺旋桨桨叶通常采用高分子材料制成,高分子材料极易受到紫外线辐射的影响而发生光氧老化,进而大大缩短桨叶的使用寿命。同时螺旋桨的桨叶和桨毂通常是一体注塑成型的,其螺旋桨的桨叶无法折叠收纳,导致无人飞行器的体积大,携带不方便,而且空间利用率低。
笔者等改进了一种适用于高原地区使用的无人机螺旋桨,其桨叶的表面设有防紫外线纳米二氧化钛涂层,使其抗紫外线老化且使用寿命长。同时改进了螺旋桨结构(桨叶和桨毂):桨叶的一端通过球形的连接头与桨毂连接,连接部位设桨夹装置,有旋钮的螺旋横杆从桨夹和球形连接头穿过,将桨叶限位固定。拆卸螺旋桨时,旋转旋钮即可将桨叶收纳,其携带方便,空间利用率高,同时避免桨叶在携带中被损坏。
3.4.2固定翼无人机机身及机翼改进
目前无人机基本分为多旋翼无人机和固定翼无人机。固定翼无人机相对于多旋翼无人机具有续航时间长、巡航面积大、飞行速度快等特点,所以固定翼无人机多用于测量作业。在高海拔地区,存在很长时间的大风天气,大风会造成机体不稳定,无法通过物理原理实现稳定飞行。
为了解决以上问题,笔者等改进了一种适用于高海拔飞行作业的固定翼无人机。通过无人机的自控或人为遥控,对大风天气中作业的固定翼无人机进行飞行姿势调节,从而保证固定翼无人机稳定的飞行状态,确保拍摄质量。主要改进有:①增添了副翼、补偿螺旋桨和摄像头防抖支架,能够对固定翼无人机的飞行姿势进行调整和镜头稳定;②改进了主翼和机身连接方式,使主翼可以相对于机身以连接处为支点上下摆动,从而调整在大风环境中的飞行姿势;③增添了上述装置配套的传感器、控制器和驱动电机。上述改进措施使得固定翼无人机在高海拔环境中稳定飞行,且保证测量作业的精度。
3.4.3无人机倾斜拍摄平台改进
现有的倾斜拍摄设备一般适用于建筑物等形状规则的拍摄对象,当在西藏高海拔地区进行野外地质填图时,针对山体、岩石、土地等不规则野外航拍对象,西藏高海拔地区的环境气候因素对无人机平稳飞行以及机载设备成像均有不利的影响,往往难以获得准确的三维模型。鉴于此,试验过程中改进了可用于高海拔地区填图的无人机倾斜拍摄平台,包括基板、调平装置、水平板和拍摄组件,以解决现有倾斜拍摄设备针对不规则航拍对象获得的模型误差较大的问题。
4 无人机地质填图与卫星遥感解译效果对比
4.1 地质概况
试验区位于青藏高原羌塘盆地南缘,处于南羌塘地块和北拉萨地块的结合部位,班公湖—怒江缝合带由工作区通过,是解决古特提斯构造演化、青藏高原早期形成的关键地区。试验区内地层发育有中下侏罗统木嘎岗日岩群(J1-2M)、上侏罗统沙木罗组(J3s)、上侏罗统吐卡日组(J3t)、下白垩统去申拉组(K1q)、上白垩统竟柱山组(K2j)、古近系牛堡组(E1-2n)、古近系丁青湖组(E3d)、新近系康托组(Nk)、第四系(郑明,2017;Zheng Ming et al., 2022)。
该项目利用中—高分辨率遥感卫星数据(ZY-3、Aster、ETM+)综合形成ETM+741波段6 m分辨率的遥感数据,系统地提取了区内的影像岩石单元、构造和蚀变异常等信息。测区岩性地层的解译主要在ETM+741波段融合ZY-3数据图像上完成的,遥感影像特征如下。
(1)侏罗—白垩系火山岩类:以块状熔岩为主,多为玄武岩,含变质岩类。在ETM遥感影像上,玄武岩类纹形、色调相比其他岩性较为特殊,宏观上,其分布区或呈块状影像,区别于沉积岩的条带状。裸露区多表现为岩体出露为深灰色或基岩氧化而成的棕红色调,部分变质为杂色。地貌上,玄武岩区多为台形山,地势较高,水系多受节理控制而呈梳状形态,沟谷平直较长,水系密度一般。

图6 典型地质体和地层的遥感影像及无人机航空影像特征(遥感影像为ETM+数据)Fig. 6 Remote Sensing and UAV images of the representative geological body and strata in test area (Remote sensing images are ETM+ data)(a)、(b)木嘎岗日岩群碎屑岩(J1-2M);(c)、(d)超基性岩岩块(∑);(e)、(f)吐卡日组灰岩(J3t);(g)、(h)竟柱山组陆相碎屑岩(K2j);(i)、(j)牛堡组湖相细碎屑岩(E1-2n);(k)、(l)去申拉组火山岩(K1q);(m)、(n)第四系冲洪积物(Qhpal);(o)、(p)褶皱构造(a), (b) The Mugagangri Group clastic rocks (J1-2M); (c), (d) ultrabasic blocks (∑); (e), (f) the Tukari Formation (J3t); (g), (h) the Jingzhushan Formation (K2j); (i), (j) the Niubao Formation (E1-2n); (k), (l) the Qushenla Formation (K1q); (m), (n) Quaternary alluvium and proluvium (Qhpal); (o), (p) fold structure
(2)碎屑岩类:碎屑岩包括了从中生界至新生界不同时代的、不同粗细的碎屑岩、泥质岩、页岩等,岩类成分复杂,影像表现形式多变,岩类内部之间的界线圈定比较困难。在宏观影像上,色调较浅,主要分布在地势较低的丘陵地区,山顶多为浑圆状,水系发育一般;由于区内碎屑岩抗风化能力不均一,在影像上表现为条带状的沟谷与山脊相间排列。水系发育一般,平面形态多呈树枝状,局部受节理控制而表现为梳状的平面形态。
4.2 建立解译标志
与传统遥感影像不同,无人机搭载的可见光高分辨率相机采集的数据,真实反映了地质体的颜色、纹理,基本不需要考虑季节、积雪、云层遮盖等因素的影响,通过野外校验即可对区域内地质体建立解译标志,快速实现影像数据的人机交互式解译。同时,本次工作除无人机填图外,也在试验的重点地区辅助开展了放稀密度的路线地质调查,以期保证野外校验及地质调查的准确性。通过ETM+遥感影像与无人机正射+三维模型图的对比,无人机数据比遥感数据有着更大的优势,无人机机动灵活的属性,便于进行野外作业。比起卫星遥感数据,无人机高分辨率影像更容易清晰的界定各个地质单元的界限,在地质调查工作中具有较大的便利性。
基于无人机地质填图试验地质解译成果和辅助性的路线地质调查,基本建立工作区内各地质体解译标志(图6),并经过野外校验(图5)。与遥感影像解译结果对比,无人机影像更为清晰,分辨率更高,各地质体接触关系及纹理清晰明显。
4.3 大比例尺地质填图应用及评价
无人机数据拥有着高分辨率的特点,在辨别区域地层、岩块、岩性等特征具有极大优势。在大比例尺的尺度下,根据各地质体解译标志,利用无人机填图获得的数据,辅以放稀的路线地质调查,进行地质体界线的圈连。
本次无人机填图工作选择藏北赞宗错地区昂吾山南侧出露的牛堡组一段进行了大比例尺填图解译试验,以野外识别标志以及无人机DOM及三维模型数据影像解译标志,进行试验区的地质信息划分提取。将DOM数据放大10倍之后,可以较为清晰的观察到各地层的接触关系及褶皱构造特征(图6p)。将DOM数据放大30倍之后,可以更为清晰的观察到更细节地质现象,图像精度局部优于3 cm,如砾石(3 ~ 5 cm)、层理、劈理等地质特征,但无法分辨出细碎屑岩岩性,如泥质粉砂岩。无人机地质填图成果(图7)与传统地质调查方法开展的1∶1000实测地层剖面测量结果(图8)相比,岩性界线划分基本无太大差异,主要区别在于岩性的辨别及详细地质描述。从应用结果来看,本次无人机试验填图解译标志的建立比较成功,总体正确率高于95%。
相比较传统地质调查,无人机进行数据解译也存在不足。传统地质调查工作可以在现场进行更为精细的岩石种类判别,更直接判别小型、微型构造,如波痕、小褶皱、重荷膜等特征,这种刻画地质体特征精细程度是无人机数据解译目前所无法达到的。
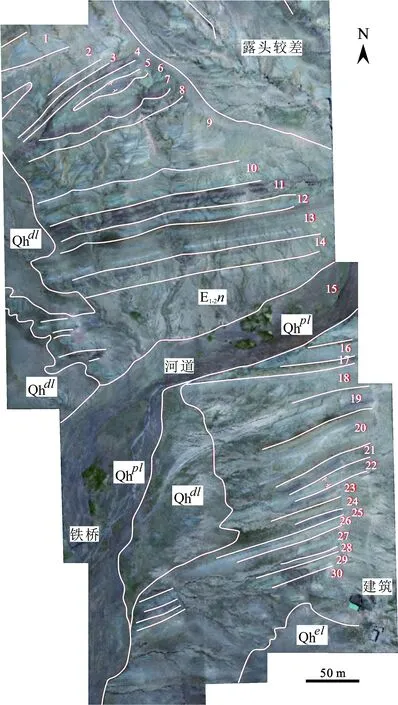
图7 藏北赞宗错地区昂吾山南侧DOM数据图叠加地质解译成果图Fig. 7 DOM overlaid with geological interpretation results from south of Angwu Mountain, Zanzong Lake area, northern Xizang (Tibet)E1-2n—古近系牛堡组;Qhdl—第四系坡积物;Qhel—第四系残积物;Qhpl—第四系洪积物E1-2n—The Paleogene Niubao Formation; Qhdl—Quaternary deluvium; Qhel—Quaternary eluvium; Qhpl—Quaternary proluvium


图8 藏北赞宗错地区昂吾山南侧古近系牛堡组1∶1000实测剖面地层柱状图Fig. 8 Stratigraphic histogram of the Niubao Formation (1∶1000) from south of Angwu Mountain, Zanzong Lake area, northern Xizang(Tibet)

图9 “空—天—地”一体化协同调查体系Fig. 9 “Space—sky—ground” integrated investigating system
5 无人机技术应用展望
5.1 无人机技术优势
目前论证无人机在地质行业的应用是否可行,是基于各类无人机近年来的发展,特别是工业级、消费级无人机的出现以及各类传感器的微型化、数字化、高精度,如高分辨率相机、可见光高分辨率相机、红外、高(多)光谱、航空物探设备、合成孔径雷达及激光雷达等,这些设备能够极大扩展无人机技术在地质领域的应用场景。无人机地质填图技术与传统路线地质调查、航空测量和卫星影像相比具有一下几点优势:
(1)成本低,风险可控。无人机通常采用质量较轻,密度较大的材料制作机身,如玻璃纤维和碳纤维材料。得益于模块化的设计,若遇设备损坏,在现场即可快速进行设备修复。
(2)操作灵活,机动性强。无人机作业由地面站进行航迹的规划,在低空可自助导航飞行,也可使用地面遥控器进行遥控飞行或半自主飞行。由于机身较小的原因,固定翼飞机的起飞可以不使用跑道,同时,抛飞、弹射起飞、车载起飞都是比较重要的起飞方式。
(3)安全性高。高原地区经常性的雨雪及大风天气给有人驾驶的飞机带来很大的风险。而无人机驾驶员是在地面对飞机的飞行姿态进行监控、检校及托管工作,为驾驶员的人身安全提供保障。针对难进入地区的地质工作,如厚覆盖区、悬崖、湖泊、沼泽、海洋、沙漠、冻土、冰川等难进入或不可进入地区,无人机亦展现出优于人工的便利(Colica et al., 2021)。
(4)数据质量高。无人机拍摄地层和地质体的分辨率可以达到厘米级,甚至毫米级(Lucieer et al., 2014;Gao Mingxing et al., 2017)。结合实地的解译标志,可以直观的看出地质体岩性、地质界线、构造特征等。
(5)工作效率高。以上述大比例尺填图举例,传统地质调查方法需配备至少3 ~ 4名工作人员,数据采集需要2 ~ 4 d。遇地形陡峭等地区,作业更为困难。而无人机数据采集工作需要半个小时时间,配备2名工作人员,基本不受地形因素的影响。
同时,试验过程暴露了高原无人机技术的一些局限性,如续航时间短、飞行姿态不稳定、数据解译任务繁琐等。这些不足亦是下一步无人机地质填图系统的升级发展的重要方向,如机身结构高强度轻质化、更高密度电池研发、智能化飞控系统、大数据处理、载荷设备升级。
5.2 无人机地质填图技术展望
无人机能够很好地衔接地面和太空间的低—高空地带(Emilien et al., 2021),轻小型无人机测绘技术是基础地质数据获取的重要组成部分。随着北斗、5G、人工智能、大数据、云计算、深度学习、虚拟现实(VR)、增强现实(AR)等新理论、新技术的快速发展,以及公共安全、国土资源和防灾救灾等领域的需求,推动着轻小型无人机地质填图技术及传统“技术密集型”基础地质工作方式向智能化转变,完善“空—天—地”一体化协同调查体系(图9)。
(1)区域地质矿产综合调查智能化。目前,第一视角飞行(First Person View,FPV)技术为我们提供了实时沉浸式飞行体验,基本可实现野外无人机现场查验工作。下一阶段,轻小型无人机在路线地质调查及蚀变地质填图任务中能够达到普通地质人员的水平,实现记录、照相、采样等实物资料收集功能。随着飞控系统、数据处理芯片和更高密度电池技术的研发,各飞行平台可搭载高(多)光谱、航空物探设备、红外相机、激光雷达等载荷设备进行长续航、大面积的地形、矿物组分、区域构造和岩性信息的野外提取,实时传输给后方指挥系统实现地质信息人工智能自动解译及可视化分析。
深度学习是人工智能发展的核心技术,地质领域缺乏具有数据驱动能力的大规模样品库,如不同区域的地质体样本、高光谱、红外等遥感影像数据难以获得,或是样本在区域上变化较大。因此,大规模样品数据库的建设十分必要,并适时开展深度学习训练以及样本数据集的解译标准、标注规范、标注工具等的研发,促进地质调查的智能化进程。
(2)无人机地质填图技术助力智慧矿山开发。矿产开发是典型的流程工业,具有种类繁多、原料来源繁杂、工艺复杂流程长、工况环境苛刻等特点。总体看,矿产开发行业智能制造水平比较落后,难以满足高质量发展的需要。矿区范围内开采区域动态变化、事故风险率高、废物排放量大、资源回收率亟待提高等问题,特别是部分矿山地处高寒高海拔地区,机器换人需求迫切。
无人机地质填图技术可替代部分矿山地面作业任务,无人机可搭载高光谱相机、高分辨率相机、激光雷达等载荷快速采集数据制作构造蚀变岩相地质图、正射影像图(DOM)、数字线划图(DLG)、三维实体模型等产品,解决如矿体产状及形态变化、采剥工程的布置、边坡安全性、地形测量、矿土方量测量与计算、生产设备安置、道路设计、地表沉降检测、矿山环境治理及检测等工作。除了地面任务外,无人机在坑道内凭借5G高带宽、低时延的传输特性,通过激光扫描定位的方式,在无GPS信号、无任何照明和复杂电磁环境下实现自主飞行、自主导航和自动避障、自动巡检,这在国内已有实例,亦是未来无人机助力智慧矿山开发的重要方向。
(3)基于无人机的虚拟地质空间。中国工程院院士、昆山杜克大学校长刘经南认为无人机测绘技术下一步发展方向将是与大数据、云计算、移动互联网、人工智能、机器人等技术结合,满足个性化、智能化、实时化、精确化的地理信息需求。20世纪90年代后期出现了数字地球(Digital Earth)的概念,即建立一个多分辨率、三维动态表达的虚拟地球,而虚拟地质建模与可视化技术(3D Geological Modeling and Virtual Visualization)是实现数字地球计划的前提之一(武强等,2011)。虚拟地质建模与可视化是指利用虚拟现实(Virtual Reality,VR)、增强现实(Augmented Reality,AR)技术构建一个虚拟地质环境,对三维地质空间的地表和地下数据进行解释、集成、模型构造以及可视化显示与分析,是地质工作成果应用与展示的重要手段(武强等,2011;刘先林,2019)。
结合GIS技术、遥感技术的地表三维模型建设已经在地质领域有了成熟的应用。大量的三维建模技术在地质领域成功运用,为增强现实技术的深入应用奠定了基础(王寅,2018)。随着物联网、云计算、5G等技术的快速发展,用户可以实时获取无人机地质填图数据并与5G技术、物联网技术与AR、VR结合起来,利用3D模拟技术来创建虚拟平台,让工人们以一种低成本、无风险的方式接触到野外作业的危险(商云涛等,2018;王寅,2018)。借助于现在较成熟的智能穿戴设备—VR眼镜、耳机和数据手柄等,使得用户自由的进入这个由计算机虚拟构建的“现实世界”的特殊场景之中。这种以计算机生成三维立体视觉、听觉、触觉和嗅觉的虚拟现实技术,使得用户可以使用自己的第一感官来感知虚拟现实的实体,通过交互操作使得用户在虚拟的“现实世界”中漫游,更加高效直接的获取地质信息。
6 结论
(1)笔者等首次将无人机引入海拔5000 m的藏北高原开展地质调查工作,探索无人机填图技术。通过5种不同类型无人机填图飞行实验,改进后的无人机(固定翼、旋翼)可在高海拔—难进入地区开展野外作业,且飞行寿命更长、飞行姿态更加平稳、影像质量大幅提升等改进优势。固定翼无人机适用于面积性工作,如大比例尺填图、实测剖面等;旋翼无人机更适用于现象精查,如地质体研究、找矿靶区检查等悬停任务。
(2)无人机是对传统区域地质调查工作方法的进一步完善,无人机获得的影像数据精度优于遥感卫星,精度最高可达3 cm,各地质体接触关系及纹理清晰明显,如砾石(3 ~ 5 cm)、层理、劈理等与传统实测地层剖面结果基本无太大差异,总体正确率高于95%,无人机地质填图技术适合在高海拔、难进入地区大—中等比例尺(1∶50000至1∶1000)地质调查中推广应用。
(3)无人机地质填图技术具有成本低,操作灵活且机动性强,数据获取快速及时、空间分辨率高、解译效果好、搭载设备类型多样等优势。随着芯片技术、电池技术、传感器设备研究的快速发展,无人机地质填图技术在未来可与大数据、移动互联网、人工智能、虚拟现实技术结合创建一种安全、多维度、高精度虚拟地质作业平台,满足个性化、智能化、实时化、精确化的地质工作需求。
致谢:感谢中国地质科学院梁锋副研究员在无人机技术发展及应用展望方面给予的帮助指导,感谢审稿专家为本文质量的提升提出的宝贵意见,感谢责任编辑在虎年春节来临之际的辛勤工作。
