基于图像视场匹配的光电吊舱陀螺漂移补偿方法研究*
2022-08-02赵志刚王德飞谢安宁陈明亮
赵志刚 王德飞 刘 虎 谢安宁 尚 乾 陈明亮
(中国人民解放军63895部队 孟州 454750)
1 引言
光电吊舱作为一种重要的侦查告警平台,具有集成度高、轻巧便利、谱段覆盖面广和技术成熟度高等优势,在民用和军事领域应用非常广泛[1~2]。尤其在军事领域,已经成为机载、舰载和车载侦查装备必不可少的部分。特别是作为无人侦察机的核心部分,填补了有人驾驶飞机进行战术侦查的固有限制,展示出了巨大的发展潜力。几次局部战争也表明,具备先进光电吊舱技术的国家,在战争制信息权的争夺中,具备碾压优势,为直接攻击提供了强大的支持。几十年来一直是各国竞相研发、推广应用的热点[3~6]。
陀螺传感器是光电吊舱的核心器件之一,在干扰力矩、噪声和温度等因素的作用下,光电吊舱启动后陀螺会发生惯性漂移,这种漂移会导致光电吊舱的光学视轴也随着漂移,最终影响光电吊舱的技术指标精度。因此,必须采用相应的措施对光电吊舱陀螺的漂移进行补偿。通常,对陀螺漂移的补偿采用对陀螺输出值进行积分并求取平均值来实现;或者利用组合导航原理,对陀螺输出值进行算法补偿。但这些技术都需要在光电吊舱上加装GPS 或者其他传感器,增加了设备的成本,更重要的是,增大了设备的体积、重量,与未来战争中光电吊舱向高度集成、灵巧便利的发展趋势相悖[7~13]。
为了减少甚至消除陀螺漂移对光电吊舱指示精度的影响,文章提出了一种基于图像视场匹配的光电吊舱陀螺漂移补偿方法,在不增加额外附属设备的条件下,实现光电吊舱陀螺漂移的自动补偿。实测检验证明,补偿方法简便可行,具备一定的工程应用价值。
2 陀螺漂移的原因
光电吊舱中陀螺漂移误差主要由陀螺固有因素和外在环境因素共同引起。
1)陀螺固有因素
机械结构方面:体现在使用过程中会有各种干扰力矩作用在陀螺仪上,这些力矩就像挂在框架上的重物一样,会使陀螺仪进动,使陀螺转轴相对惯性空间渐渐偏离起始位置,从而破坏了陀螺仪的定轴性,对陀螺仪使用造成误差。
构成器件方面:噪声是导致陀螺漂移的主要因素,噪声一般为白噪声,包括散粒噪声、相对强度噪声、热噪声,以及不占主要成分的热相位噪声、量化噪声和其他环境引入的噪声等,其产生的主要原因是为了构成陀螺的干涉光路,保证光路互易性以及灵敏度的最优化,在光路中引入了各种器件。但由于这些器件的性能不佳以及器件引入与光纤的对接所带来的光轴不准、接点缺陷引起的附加损耗和散射等,将产生破坏互易性的新因素,进而产生漂移。
2)外在环境因素影响
温度的影响:温度对于陀螺的影响主要为温度变化、温度变化率和温度梯度三个方面[14]。温度变化对光纤陀螺的影响为陀螺工作温度变化将导致光源发出的光不稳定,其波长将随温度发生变化。同时,光纤折射率也将发生变化导致相位变化。另外,光纤发生线膨胀,导致光纤长度变化。根据光纤陀螺工作原理,温度引起的这些变化都将引起陀螺漂移;温度变化率对光纤陀螺的影响为温度变化率通过影响光纤环的内部温度分布,造成光纤环圈内部膨胀以及折射率不均匀面对在其中传输的两束光产生不同的影响,由此引入非互易相移,产生光纤陀螺漂移。温度梯度对光纤陀螺的影响为当外界温度变化时,壳体内对温度敏感的光纤环器件会经历一次热传导过程,改变壳体内光纤和光纤环本身的性能以及光纤环内部的温度场分布,从而引入非互易相移,进而产生陀螺漂移。
振动的影响:光波的偏振态受到磁场影响会发生变化,这种变化方式与光的传播方式有关,这种现象称为磁光法拉第效应。由于应用环境中不可避免的会存在磁场,因此磁光法拉第效应也会影响陀螺的非互易效应,产生漂移[15~16]。
3 补偿原理
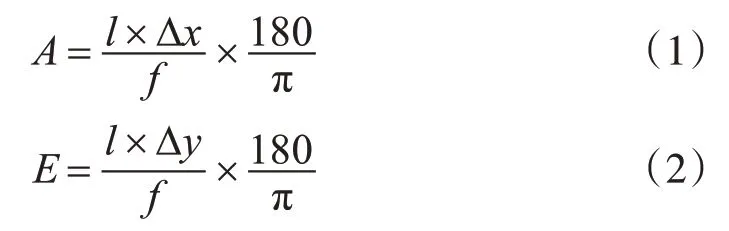
光电吊舱在启动后(各分系统均正常工作),将方位∕俯仰调整至零位,然后处于惯性静止状态。在光学视场内选择目标进行观瞄,同时开始计时。Δt 为目标观瞄时间,一般选择4s~6s。在选取目标时,原则是轮廓清晰、辨识度高、特征明显,且目标与背景的相似度大于30%~50%为宜。计时结束后,通过计算得到在Δt 时间内目标在光学视场中的方位移动像元数(Δx)和俯仰移动像元数(Δy)。计算示意图如图1 所示,p 和p'为目标移动前后的位置。根据目标在光学视场中方位和俯仰两个方向的移动的像元数、光学系统焦距f 和成像探测器的像元大小l ,计算Δt 时间内光电吊舱视轴漂移的方位角度A 和俯仰角度E:
依据视轴漂移的方位和俯仰角度,得到陀螺方位和俯仰方向的漂移补偿参数ωA和ωE为

漂移补偿的标准为补偿阈值,由光学系统中允许的每秒最大视场漂移角度计算得到,为光电吊舱当前视场的1%,即:

式中,n 为光学成像探测器方位和俯仰像元数中的较大值。
具体方式为首先计算补偿阈值φ,然后判断漂移补偿参数ωA和ωE是否大于补偿阈值φ,如果大于补偿阈值φ,将ωA和ωE代入陀螺的采样程序,进行同值反向陀螺漂移补偿。如果陀螺方位和俯仰漂移补偿参数都不大于补偿阈值,说明光电吊舱的陀螺漂移量可以忽略,不需要进行任何操作处理。
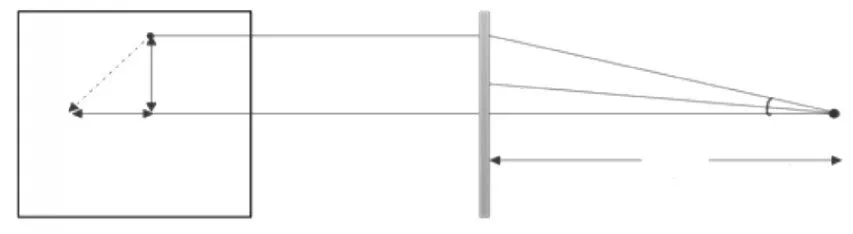
图1 光电吊舱视场角计算示意图
4 试验验证及分析
为了验证补偿方法是否有效,在某型光电吊舱上进行了实测(该吊舱未加装GPS等额外的传感器进行陀螺漂移补偿)。按照文中提出补偿原理,首先进行了陀螺采样程序编写,然后注入到操作软件中,最终通过软件界面上的俯仰∕方位“零漂+”或“零漂-”进行步进式调整,实现陀螺的漂移补偿。软件操作界面如图2 所示。光电吊舱加电之后,待各项功能正常运行后,手动操作光电吊舱选择轮廓清晰、辨识度较高的目标进行观瞄。确定好目标后,操作光电吊舱,使得视场中心的十字靶心指向目标中心,然后开始定时监视,查看光电吊舱的陀螺漂移情况。选择十字靶心指向目标中心的时刻为T0,采集视频图像,然后每间隔30s,采集一副图像,按照光电有效攻击时长40s~60s 的时段估算,采集4 副图像为一组。未采用任何补偿技术的光电吊舱的陀螺漂移如图3 所示。同时还记录了对应时刻的光电吊舱方位∕俯仰角度,如图4所示。

图2 陀螺漂移补偿操作软件界面
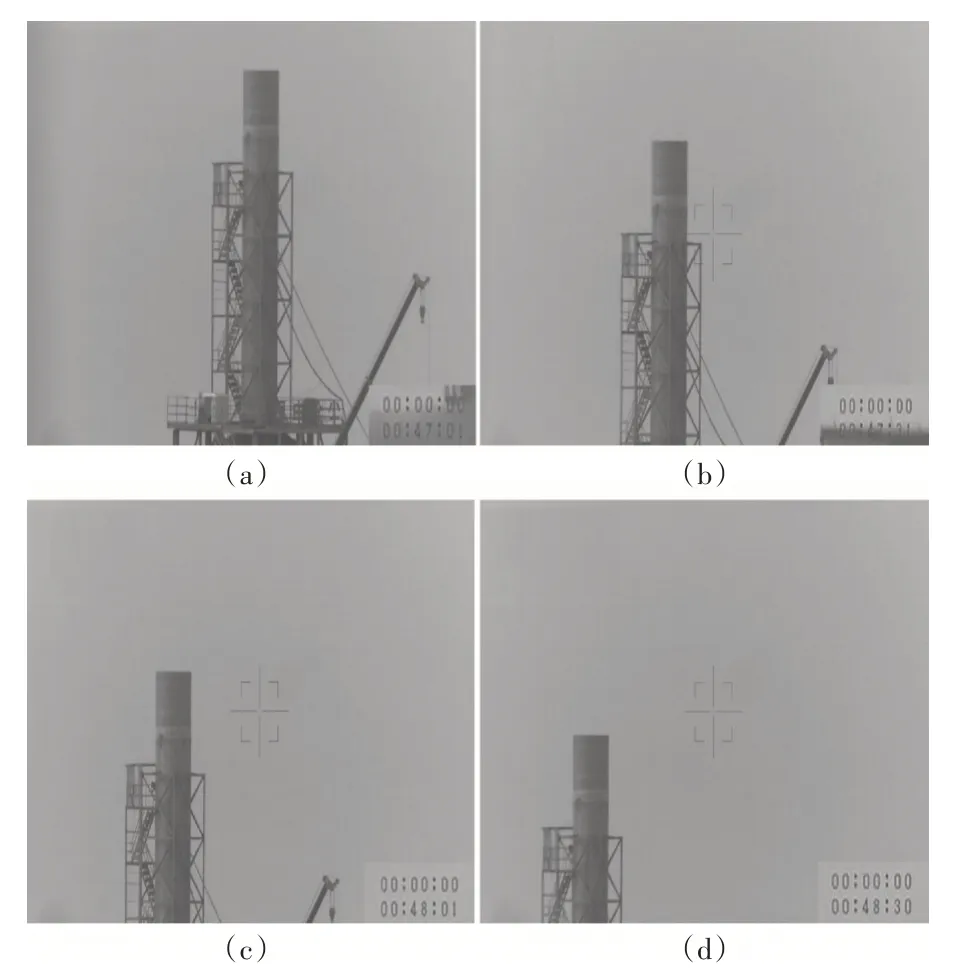
图3 补偿前90 s内靶心漂移图((a)~(d)相邻两图间隔30 s)
由图可知,陀螺在未进行漂移补偿前,90s内的十字靶心图像出现了较大的偏移。在T0时刻,十字靶心准确指向目标中心区域;T30时刻,十字靶心飘向目标中心区域的右上方;在T60和T90时刻漂移量进一步增大,如果光电吊舱距离观瞄目标较远,从T30时刻即可视为脱靶,无法继续进行后续动作。从光电吊舱对应时刻的方位∕俯仰角度来看,T0到T90,方位发生了0.6253°的漂移,俯仰发生了0.5917°的漂移,属于较大角度的漂移,必须进行技术干预。
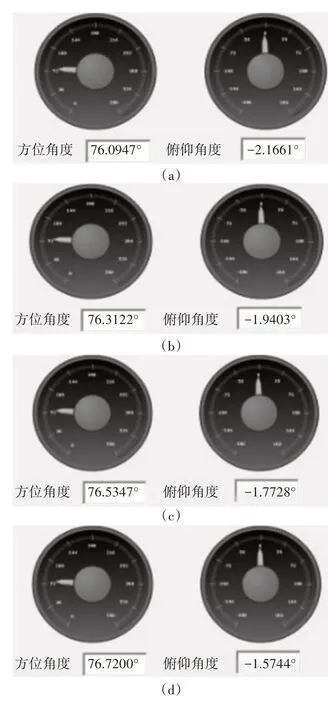
图4 补偿前90s内靶心方位∕俯仰角度((a)~(d)相邻两图间隔30s)
操作软件界面的补偿按钮,先进行初步陀螺漂移补偿,观察十字靶心的漂移速度明显变缓之后,再进行精细补偿调整。同样的,选择轮廓清晰、辨识度高的目标进行捕获,十字靶心精确指向目标的中心区域,然后观察方位和俯仰位置的漂移,进行反向调整,直至十字靶心稳定指向目标中心区域。对试验中的光电吊舱进行陀螺漂移补偿后,选择相同的场景、观瞄目标、光学系统焦距等参数,进行90s 观瞄监测,在T0、T30、T60和T90时刻的图像如图5所示,同时,记录对应时刻光电吊舱的方位∕俯仰角度,如图6所示。
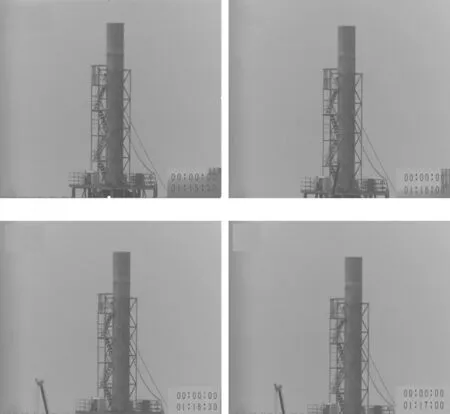
图5 补偿后90 s内靶心漂移图((a)~(d)相邻两图间隔30s)
由图可知,补偿后光电吊舱陀螺的漂移有了明显改善,90s内的漂移量相对较小,十字靶心偏离中心区域较小,按照光电有效攻击时长40s~60s的时间评估,采用文章提出的补偿技术可以确保十字靶心持续指向目标,补偿方法是有效的。从方位∕俯仰的漂移角度来看,90s 内方位漂移了0.0948°,俯仰漂移了0.1053°,与未进行技术补偿前的方位∕俯仰漂移量相比,实现了接近1 个数量级的提高。综合来看,文中提出的补偿技术,对于光电吊舱陀螺的指向稳定性是有效的,具备工程应用价值。
从图中可知,虽然进行技术补偿后,光电吊舱的陀螺漂移有了明显的改善,但依然存在微小的漂移,没有完全消除。之所以依然出现较小的漂移,分析原因主要有三点。第一点是在光电吊舱陀螺采样程序编写时,方位∕俯仰的单次补偿步进量稍大,虽然提高了调整效率,但是影响了补偿精度。如果把方位∕俯仰的单次调整量修改为大的幅值和小的幅值两种,就可以通过大的幅值实现初始粗调,然后再通过小的幅值进行后期精调,操作就会更加科学合理,陀螺漂移补偿的精度就会更高;第二点是为了选择合适的观瞄目标,同时模拟机载试验场景,试验时将光电吊舱放置在了距离地面60多米高的楼房上,同时使用液压升降车模拟机载平台。风速、温度变化和液压升降车的自身稳定性都会对光电吊舱的指示精度产生影响。这种使用场景在补偿时不能去除,需要综合考虑。第三是人为因素。个体的习惯差异、心理素质不同,在操作光电吊舱进行试验时,也会带来误差。后续的试验中,将会继续优化陀螺采样程序,调整方位∕俯仰的“零漂”步进量,模拟更加逼真的机载试验场景,强化光电吊舱技术保障人员的实操技能,更好地优化光电吊舱陀螺的漂移,全面提升设备性能。
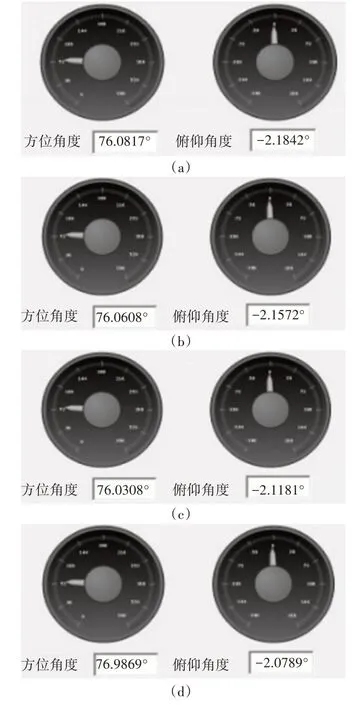
图6 补偿后90 s内靶心方位∕俯仰角度((a)~(d)相邻两图间隔30 s)
5 结语
光电吊舱陀螺的漂移除了影响侦查过程中的指示精度外,还会影响跟踪过程中的指示精度,尤其是当跟踪远距离的小目标时,指示的不稳定会使目标不间断的脱靶。最明显的表现是带有激光测距装置的光电吊舱,在陀螺漂移较大的情况下,对远距离目标进行照射∕测距时,经常会发生无激光回波信号的现象。因此,对于光电吊舱陀螺的漂移,必须进行有效补偿。文中提出的补偿方法,不需要增加额外的设备,对于光电吊舱的结构状态没有任何影响,简单可行,通过试验证明,该方法可以对光电吊舱陀螺的漂移进行有效的补偿,为工程应用提供了有价值的参考。
