一种舰船永磁同步电机自适应控制方法设计*
2022-08-02刘亚雷顾晓辉
刘亚雷 顾晓辉
(1.中国人民武装警察部队海警学院舰艇指挥系 宁波 315801)
(2.南京理工大学智能弹药技术国防重点学科重点实验室 南京 210094)
1 引言
Takahashi,Noguchi 和Depenbrock[1~2]提出了直接转矩控制(Direct Torque Control,DTC),给出了空间矢量与定子磁链定向的概念,建立了定子坐标系,通过分别比较给定的磁链、转矩与实际的磁链、转矩之差得到控制器的控制信号,从而完成对电机直接转矩的控制。该控制方法结构简单,系统动态响应快,受到了学者的关注,获得了许多研究成果[3~6],如PID 调节器,但是舰船永磁同步电机在海上复杂环境及舰船不同工况下运行时,其调速控制具有非线性变化的特点,且转矩容易受到扰动,严重影响电机控制的稳定性,这一问题在舰船中低速航行时更为明显。为此,相关研究人员提出了相应改进方法[7~9],如分别提出了基于模糊理论控制机制[10]、BP 神经网络动态调整控制误差方法[11]、小波神经网络动态调整和控制方法等[12],在上述上方中都存在不同程度的缺陷,其中基于模糊理论控制机制在干扰发生时使得控制系统的超调量较高,从而系统波动明显,BP 神经网络动态调整控制误差方法造成系统收敛较慢,超调时间过长,而小波神经网络动态调整和控制方法具有人为设定阈值,不具有全工况适应性等问题。针对上述永磁同步电机控制系统在稳定性、反应时间及控制误差方面存在的问题,本文提出一种自适应鲁棒控制方法,该方法可有效改善永磁同步电机的自适应调节能力,减少系统调节时的波动参数,提高系统响应时间,具有较强的转矩响应和磁链响应能力,从而提高了舰船永磁同步电机控制系统的鲁棒性。
2 舰船永磁同步电机的数学模型
永磁同步电机在忽略铁心饱和和电机绕组漏感,假设气隙中磁势呈正弦分布,忽略磁场的高次谐波,可以得到永磁同步电机在同步旋转两相坐标系下的数学模型,在d-q 坐标系中定子电压方程及电子磁链的数学模型如下:

式中电磁转矩Te,负载转矩TL,J 为电机的转动惯量,F 为阻尼系数,np为磁极对数。
3 DTC控制系统设计
直接转矩控制原理是将定子磁链进行调制,根据定子磁链旋转d-q 坐标系中的数学模型,使用坐标变换可得永磁同步电机的电磁转矩数学模型为

式中:ψs为定子磁链值;ψf为永磁体磁链值;δ为电机功角。
由式(6)可得,通过控制可以使转子的转矩保持不变,假如定子磁链幅值和转子磁链幅值保持为定值,则电机功角的变化决定着电磁转矩的变化。
舰船在航行时,由于工况及海上环境的变化,使得永磁同步电机功率输出系统具有非线性等变化,然而只要实现对定子磁链值和电磁转矩的控制,就可以实现永磁同步电机功率的平稳输出。在DTC控制系统中,定子磁链幅值与转矩控制估算电机定子磁链时,假设定子磁链值初值为0,则有:

不计定子电阻降低值可得:

从式(7)、(8)可看出,在电机定子上通入矢量电压us后,ψs的箭头末端将会沿着该原来矢量的方向移动,或者说ψs将沿着us方向增加一定的矢量值,方向不变,幅值增加。ψs实为us的在时间上的积分值,其大小由us作用时间Δt 决定,ψs矢量增大或者较少后的方向变化由us的方向决定。Δt时间后,定子上的总磁链ψsi等于原磁链值和磁链变化值的矢量和,即:

由此可知,矢量电压可以精确地控制定子磁链的大小旋转方向及速度,则不需要其他参数的变动。因此,可利用两点式调节产生脉宽调制信号,直接对逆变器的开关状态进行控制,而控制电机转矩可以直接改变定子电压的强度,使定子磁链方向不变,从而使转矩的动态响应更高。
图1 为DTC 控制系统方框图,其系统由速度控制器、转矩调节器、开关选择器、光电码盘、磁链控制器、PWM逆变器、滞环比较器组成。

图1 DTC控制系统方框图
DTC控制系统是一个闭环自动控制过程,该系统中控制电压矢量,使其幅值方向保持在误差范围内,电压矢量决定电机定子磁链幅值方向,如果电压矢量稳定,则可使误差稳定。转子磁链旋转速度的稳定可通过调节磁链的瞬时值来实现。定子三相电压值由直流母线电压和开关表值得到,测得的电流与电压经过图中坐标转换,得到坐标系中的电流、电压信号,从而可得电机的定子磁链、电磁转矩。在上述控制过程中滞环比较器是DTC 控制系统的核心,其作用是把电压指令和输出电压进行比较,将正确的信号输出给开关表,滤除偏差信号,比较器根据信号正负控制开关器件的状态,以此实现电压的跟踪控制。但是该比较器没有自调制功能,容易使转矩和磁链波动,只能在运行周期内找到一个合理的运行电压,一个周期内可选择的电压矢量数量不多,因此,比较器的选择是人为择优设定,不利于不同工况下永磁同步电机控制。
4 永磁同步电机自适应控制
自适应控制是一种能修正自己特性以适应对象和扰动动态特性变换的一种控制方式。为了在运行周期内实现永磁同步电机自适应电压跟踪控制,本文根据电路多种通断情况和各个开关变化的状态设计电压矢量合成状态分布,利用该状态分布使电压分类合理,在不同工况下,通过开关变化控制电压状态自动切换,从而达到自适应电压跟踪控制的目的,上述包含电压空间矢量时间计算、电压矢量合成时序两个步骤。
4.1 电压空间矢量时间计算
图2 为电压矢量合成状态分布图,图3 为电压参考矢量合成图。
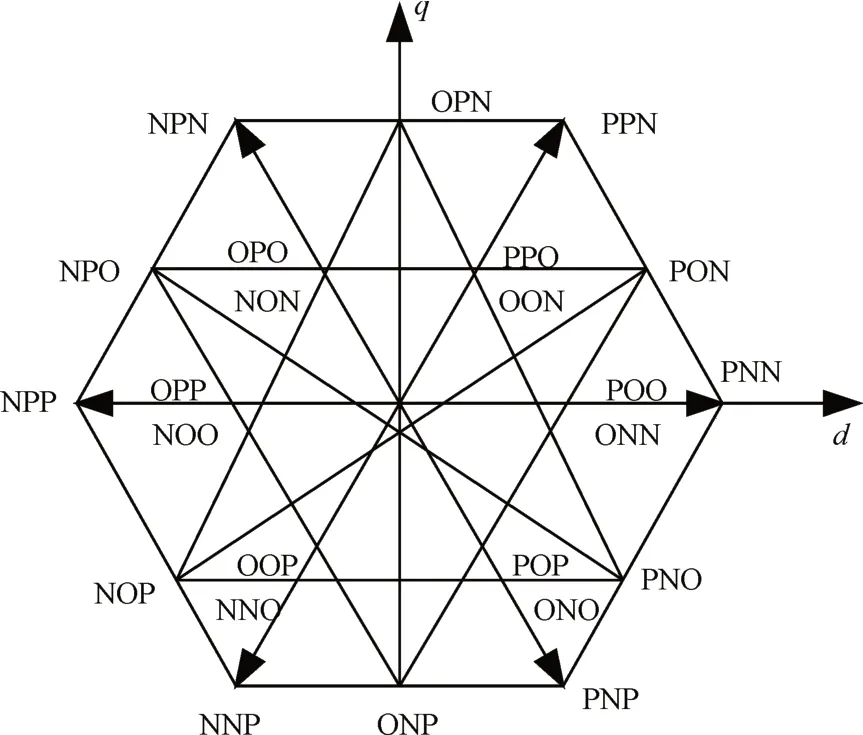
图2 电压矢量合成状态分布

图3 电压参考矢量合成图
在角度为0°~60°的范围内,逆时针旋转,假设电压矢量位于C中,根据Volt second principle定理,得到以下公式:

V1、V2、V4的作用时间为Ta、Tb、Tc,Ts为调制周期,且 有Ta=Ts(1-2k sin θ) ,Tb=Ts[1-2k sink 为控制程度值,以此类推,可以计算出其他角度的电压矢量合成的时间。
4.2 电压矢量合成时序
由整流器输出的电压矢量是按一定顺序合成,如位于三角形C 中参考电压为Vref,其电压矢量合成时序方法如图4所示。

图4 电压矢量合成顺序图
假设电压矢量先增大,后减少,而后以此循环,以图4 中的相关合成方法为例,PPO 为最小适量,输 出 顺 序:PPO→POO→PON→OON→ONN→OON→PON→POO→PPO。以此为信号,整流器的三相桥臂就可以按要求控制开关的状态。
5 仿真验证
为了验证本文自适应控制方法的有效性,基于Matlab∕Simulink 环境下进行了仿真试验。仿真参数如下:np为8,Pe为4088kW,Ue为660 V,Rs为0.001502 Ω,Ld,Lq为0.4767 mH,J 为1200 kg·m2,ψf为3.6Wb,额定转速n 为1750 r∕min,Tn为195 KN·m。
条件一:假设电机在额定转速1750r∕min 下运行,在t=0.1s 时,由于海上环境及航行工况变化,电机的转速突然降为1000r∕min,利用本文的自适应控制方法,在Matlab仿真计算下得到电机转速响应及转矩响应分别如图5、6 所示。由图可知,外部干扰因素作用下,本文自适应控制方法,转速及转矩曲线能够快速响应,完成自调节,并能够保持系统能够快速跟踪变化,提高系统的稳定性。
条件二:假设电机在初始转速1000r∕min 条件下空载启动,t=0.05s 其负载增加5KN·m,利用本文自适应控制方法,在Matlab仿真计算下得到电机转速响应及转矩响应分别如图7、8 所示。由图可知,在自适应控制策略下,电机在恒转速变转矩工况下可以得到应用。
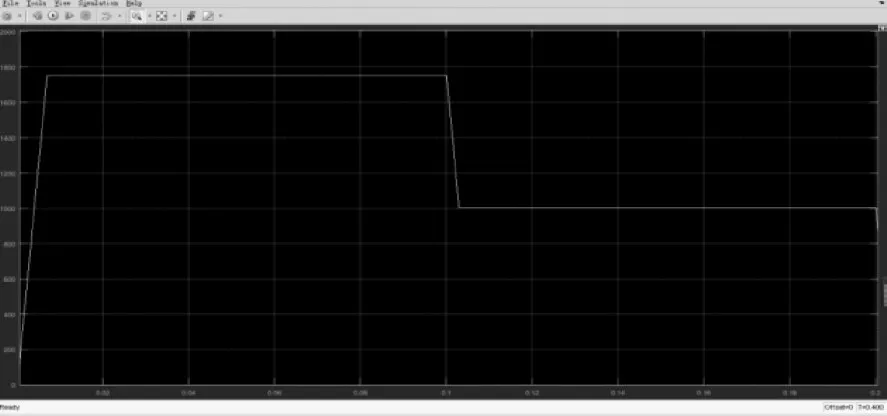
图5 转速响应

图6 转矩响应

图7 转速响应

图8 转矩响应

图9 转速响应
条件三:假设电机初始在额定转速1750r∕min下运行,在时间为t=0.1s 时转速变为1000r∕min,在t=0.2s 时电机反转,转速为-1000r∕min,在t=0.3s 时转速为-1750r∕min。基于Matlab 仿真计算下得到电机转速响应及磁链响应分别如图9、10 所示。由图可知,本文提出的自适应控制方法可有效跟踪电机的转速变化,快速响应电机的速度变化,此外通过磁链响应曲线可知,此控制方法调制过程平稳,因此,证实了本文控制方法在电力推进系统中变工况工作下的电机控制系统动态性能得到了改善。
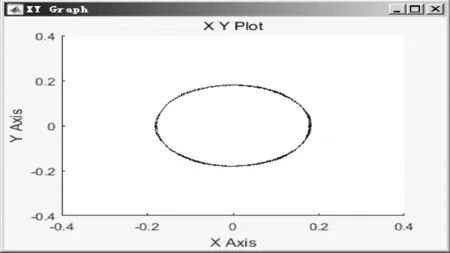
图10 d-q 坐标系下的磁链响应
6 结语
本文从电压空间矢量时间计算及电压矢量合成时序两个方面,通过开关变化控制电压状态自动切换,达到了永磁同步电机自适应电压跟踪控制的目的。利用Matlab∕Simulink 软件仿真模拟计算了在不同海上条件及工况下电机的转速响应及转矩响应,结果表明本文设计的自适应控制方法,能够快速响应电机的转速及转矩变化并完成自适应调节,体现了控制系统快速跟踪能力,永磁同步电机的转矩扰动较小,优化控制效果明显,从而提高了系统稳定性。
